导航卫星激光反射器技术发展综述
2018-04-27吕华昌陈念江钟声远李楠楠李长桢郭丽娜耿园园
吕华昌,陈念江,钟声远,吴 健,李楠楠,李长桢,郭丽娜,耿园园
(固体激光技术重点实验室,北京 100015)
1 引 言
1960年,美国T.H.Mamain在实验室研制成功世界首台光波红宝石激光器,由于激光特有的方向性、单色性、相干性和高亮度特点,1963年第三届国际量子电子学会提出利用新光源测量卫星距离的可能性。1964年10月,美国通用电器公司和戈达德飞行中心(GFSC)先后成功测得NASA发射的世界首颗带激光反射器的卫星-探险者22号(BE—B)的距离。随后,卫星激光测距(Satellite Laser Ranging,SLR)技术得到了迅速的发展,在卫星轨道测量、地球自转参数测定、地壳运动监测、大陆板块运动、潮汐变化参数的精确测定等领域得到广泛应用,经过三代的发展,目前精度为亚厘米级,正在研制的四代卫星激光测距系统预期精度可达毫米量级。1998年11月,在德国第11界国际激光测距大会上正式成立国际激光测距服务(International Laser Ranging Service,ILRS)组织,统一组织SLR国际观测和数据应用。作为卫星轨道单点测定精度最高(尤其是卫星径向精度)的一种技术,SLR技术已成为当今文地球动力学一项重要观测手段,与GPS技术、甚长基线干涉测量VLBI(Very Long Baseline Interferometry)共同组成空间大地测量主要新技术[1-5]。
卫星激光角反射器(Laser Retro-Reflector,简称LRR)为无源光学器件,作为SLR技术空间载荷部分,装载在卫星表面,其作用是增强星体目标对激光信号的反射率,将测距站发射的激光光束原方向反射回地面,以实现星地距离的精密测量。装载激光反射器的卫星,范围遍及数百公里的近地轨道直至地球同步轨道,按分类可分为测地卫星、对地观测卫星、科学/实验卫星、导航卫星等。
导航卫星系统可为用户提供高精度时空基准和精确信息,在现代社会生活中发挥重要作用。为实现卫星轨道的精密标定,导航系统大多组成星体都配有激光反射器,以辅助实现卫星精密定轨、GPS定轨结果标校等用途,本文主要就导航卫星激光反射器发展现状、设计主要问题以及未来趋势研究方向进行了评述、讨论和展望。
2 SLR测距和定轨原理
卫星激光测距的原理是通过精确测定激光脉冲从地面观测点到装有激光反射器卫星的往返时间间隔Δt,从而计算出卫星质心到测站仪器中心的距离D[6-7]。
D=CΔt/2+ΔD
(1)
式中,ΔD为测站测距修正数,包括测站的潮汐修正、测站板块运动修正、测站偏心修正、测站大气延迟修正、测站广义相对论修正、卫星质心修正等,计算过程中,还应对测量光路和电气系统的时延等参数进行严格的标定[6]。
SLR精密定轨采用动力学统计定轨方法,即基于星站距离观测量和各种动力学模型,用动力学理论求解卫星轨道根数和其他运动学参数。
精密定轨是在低精度的参考轨道(简称初轨)的基础上,利用区域或全球跟踪站的观测数据对参考轨道进行改进。轨道改进的同时还可以根据需要解算整周模糊度、测站坐标、对流层延迟、地球自转参数、天线相位中心偏差、地球质心偏差等参数。
实际卫星飞行运动中,初始状态处于未知状态,其运动方程的物理常量和模型存在误差,从而导致理论积分计算轨道与卫星真实轨道间存在偏差。为获得接近真实轨道的积分轨道参数,必须对卫星进行跟踪观测,通过观测量的约束不断优化迭代卫星状态矢量,使之满足预设精度,最后综合卫星跟踪几何信息和星体运动动力信息来估算卫星初始状态及参数,这其中,SLR测距采样量精度决定了卫星定轨精度的高低[8]。
3 导航卫星激光反射器发展现状
导航卫星激光反射器是卫星激光反射器的一个主要应用方向。美国GPS、中国北斗、俄罗斯GLONASS和欧洲GALILEO系统并称为全球四大卫星导航系统,发展迅速,日本、韩国、印度等国家为本国或本地区利益考虑,也在积极发展各自区域系统[9]。导航卫星轨道范围从10000多公里直至40000多公里,从分类上归为中高轨道卫星,采用多个反射器组合平面阵列方式。

图1 四大卫星导航系统Fig.1 Four major satellite navigation systems
3.1 美国GPS
美国GPS(Global Positioning System)是世界首个建成的导航定位系统,全球信号覆盖率达98%。经过多年发展,GPS星座已共发射50多颗卫星,在轨运行卫星30余颗,星座构形趋向于一种6个轨道平面的均匀分布与非均匀备份混合形式,平均轨道高度20200 km,轨道倾角55°,周期11 h 58 min,经历一代和二代的发展,目前处于GPSⅢ现代化阶段[9]。这其中,仅有1993年8月和1994年3月发射的地球同步卫星GPS-35和GPS-36配有俄罗斯空间设备研究所提供的激光反射器,轨道高度36000 km,平面长方形阵列,正六边形切割,内接圆直径28.6 mm,反射器数量32个,反射面镀铝膜。由于有效反射面积较小(239 mm ×194 mm),是目前高轨卫星中观测难度最高的反射器[1,10]。

图2 GPS35、36星反射器Fig.2 LRR of GPS 35,36 star
3.2 俄罗斯GLONASS
俄罗斯GLONASS为前苏联20世纪80年代初开始建设的卫星定位系统,系统架构、定位原理和方案规划都与GPS类似,卫星轨道19100 km、轨道倾角64.8°,轨道周期为11 h 15 min,分布在3个轨道平面,后由俄罗斯继续该计划。截至2016年,GLONASS系统已发射百余颗卫星,实际在轨运行卫星已达30余颗,卫星大多配有激光反射器。目前,列入国际ILRS 组织观测的有GLONASS123、125、128、129、131、133、134、136星[9-10]。
GLONASS系统激光反射器采取正六边形切割,内接圆直径28.3 mm,1996年前发射激光反射器由俄罗斯精密仪器工程研究所(The Institute for Precision Instrument Engineering)制造,外形尺寸平面正方形阵列(1200 mm×1200 mm),反射器数量396个,材质为熔融石英玻璃,为获得最大观测范围,采用全角入射设计。GPS-35和GPS-36反射器就是俄罗斯提供给美国相似设计的小反射面积产品[10]。

图3 GLONASS反射器(1996年前)Fig.3 LRR of GLONASS(before 1996)
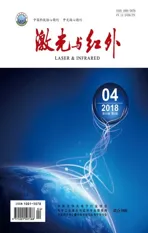
1996年后发射的GLONASS卫星搭载了各种不同对称布局的平面阵列激光反射器,反射器数量包括132、124(GLONASS-M)、112、123(GLONASS-K1)、36(GLONASS-K2)多种,镀膜方式包括非镀膜和镀金属铝膜,为获取高反射率,GLONASS-125以后的卫星反射器均采用非镀膜方式[10]。
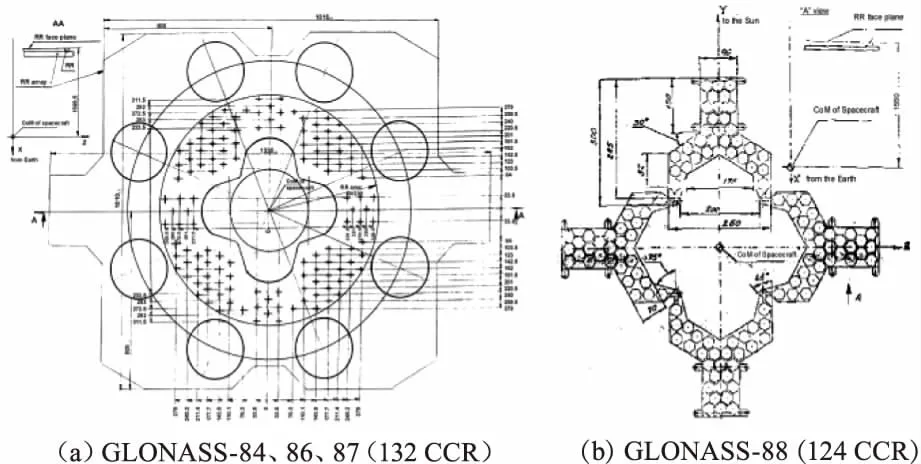
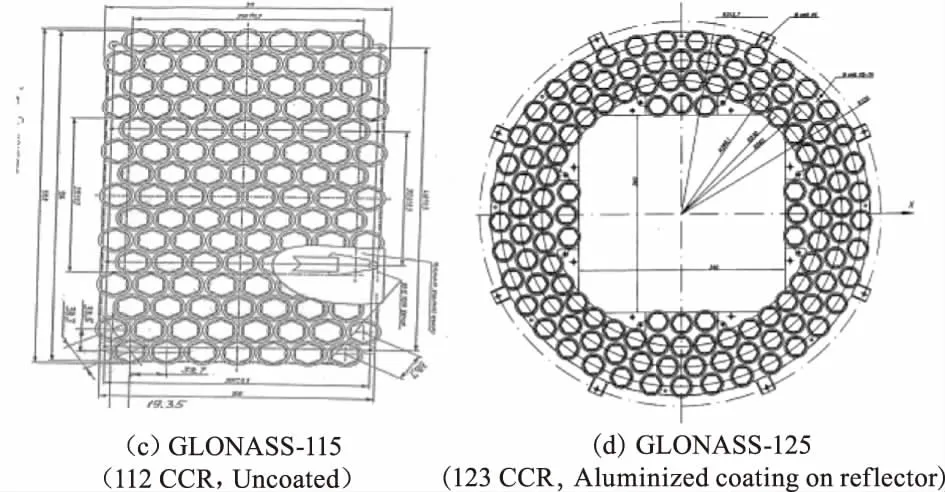
图4 GLONASS反射器(1996年后)Fig.4 LRR of GLONASS(after 1996)
值得一提的是,俄罗斯不断丰富和尝试高精度激光反射器设计,1997年采取“单一方向仅有唯一反射器反射激光”构想,最大程度消除反射器分布效应影响,发射的“西太平洋卫星WESTPAC”反射器精度达到0.5 mm;1998年,俄罗斯空间设备研究所提出用Luneburg透镜原理制成的在小角度范围内近似无光程差的球形玻璃反射器,设计精度0.1 mm,2001至2006年随Meteor-3M航天器进行测试,并于2009年发射BLITS纳米卫星反射器,用于地震监测[4,7,10]。
图5 俄罗斯新型反射器Fig.5 New LRR of Russian
3.3 欧洲GALILEO
GALILEO卫星导航系统(Galileo Satellite Navigation System)是由欧盟研制和建立的第一个基于民用的全球卫星导航定位系统[9]。系统由30颗卫星组成,卫星轨道高度约2.4万公里,位于3个倾角为56°的轨道平面内,轨道周期14 h 22 min。截至2016年12月,已发射18颗工作卫星,具备早期操作能力(EOC),并计划在2019年具备完全操作能力(FOC),全部30颗卫星(24颗工作卫星,6颗备份卫星)计划于2020年发射完毕。为提高卫星在轨精度,每颗GALILEO卫星均搭载激光反射器,列入国际ILRS 组织观测的有Galileo-101~104、Galileo-201~214星[10]。
GALILEO卫星激光反射器分别由中国和俄罗斯提供(图6)。中国中电11所为GALILEO主供货商之一ASTRIM公司提供了四颗IOV阶段正式卫星(Galileo-101、102、103、104)激光反射器,俄罗斯为GALILEO另一主供货商OHB公司提供2颗试验卫星(GIOVE-A、B)和后续FOC阶段的激光反射器。中电11所设计激光反射器采取类圆形平面布阵,正六边形切割小边切割,内接圆直径33 mm,反射器数量84个,入射面镀ITO导电膜,单角误差0.8″±0.5″,直角反射面非镀膜[10-12];俄罗斯激光器GIOVE-A星采取梯形平面布阵,正六边形切割,内接圆直径27 mm,反射器数量76个,直角面镀铝膜;GIOVE-B星采取正方形平面布阵,正六边形切割,内接圆直径27 mm,反射器数量67个,直角面镀铝膜;FOC阶段卫星反射器采取长方形平面布阵,正六边形切割,内接圆直径28.2 mm,反射器数量60个,制造误差0.8″,入射面镀增透膜@532 nm,直角面非镀膜[10]。

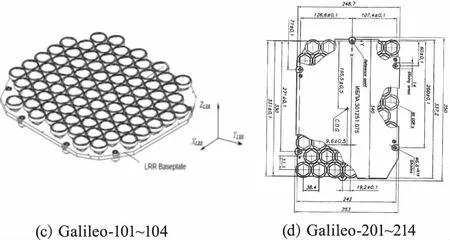
图6 GALILEO卫星反射器Fig.6 LRR ofGALILEO satellite
实际观测数据结果比较,FOC阶段中国制造的Galileo-101~104星反射器观测效果和回波数整体好于同类国外产品[10],如表1所示。
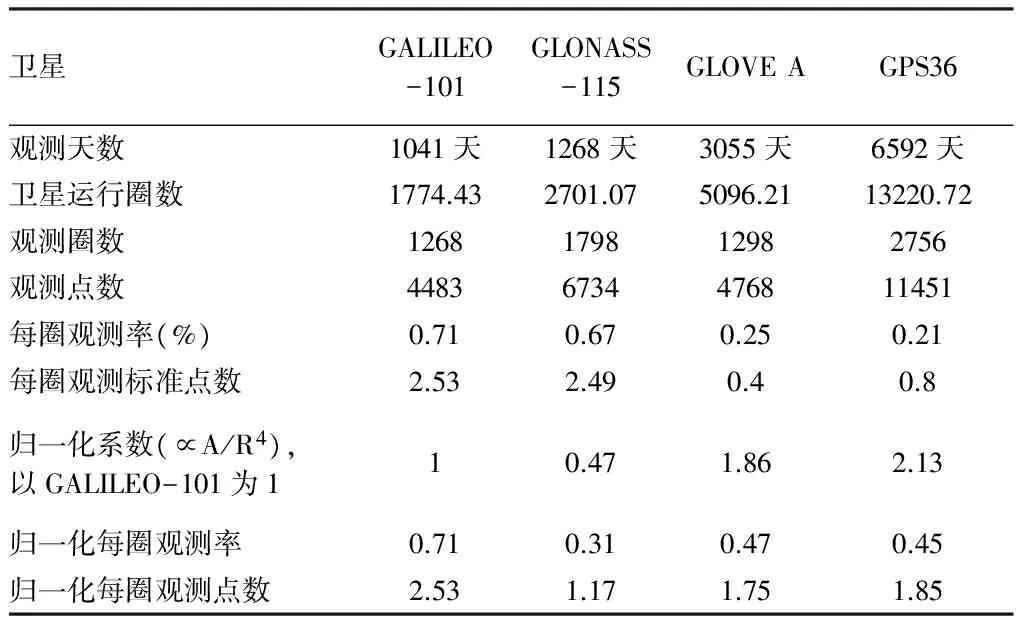
表1 GALILEO卫星反射器观测效果比较 (截至2014.10.30,数据来自ILRS网站)Tab.1 Comparison of the effects of GALILEO satellite reflectors (截至2014.10.30,数据来自ILRS网站)
3.4 中国北斗
北斗导航卫星系统(BeiDou Navigation Satellite System,BDS)是我国自行研制的全球卫星导航定位系统,在全球范围内提供基本的导航、定位和授时服务,同时可为我国战略重点地区提供高性能导航、定位、授时和短报文服务。北斗卫星导航系统空间段计划由35颗卫星组成,包括5颗静止轨道卫星、27颗中地球轨道卫星、3颗倾斜同步轨道卫星。北斗建设分为三步,第一步和第二步,北斗一号试验星系统和北斗二号区域系统已经完成,目前正推进实施北斗三号全球系统建设,预计2020年建成[9-10]。
为提高星体在轨精度,北斗卫星也搭载激光反射器(图7),并在实际测距中取得良好的应用效果。目前,上海天文台和中电11所承担了北斗卫星激光反射器研制工作[10,13]。

图7 北斗系列卫星反射器Fig.7 LRR ofCOMPASS satellite
3.5 其他导航系统
除了上述全球4大系统,其他国家也在积极发展自己的区域系统或增强系统,区域系统主要包括日本的QZSS和印度的IRNSS[9]。
2006年,日本政府提出建立区域卫星导航系统——准天顶卫星系统(QZSS)。QZSS星座由7颗高轨卫星组成,包括3颗倾斜地球同步椭圆轨道(IGSO)卫星、1颗GEO卫星和3颗HEO卫星。 QZSS卫星轨道32,000-40,000 km,轨道倾角45°,设计寿命12年以上,现已发射2颗卫星,计划2017年底再发射 2颗组成自己的区域系统,QZSS都配有激光反射器。列入国际ILRS 组织观测的有QZS-1、QZS-2星[10]。
准天顶系列卫星激光反射器采取了和日本2006年发射的ETS-8通讯卫星(反射器数量36个)同样的结构设计,但两面角误差取值不同。 QZSS卫星激光反射器(图8)内接圆直径1.6 in,反射器数量56个,速差两面角误差为0.8″±0.5″,表面不平度1/10λ@532 nm,直角反射面非镀膜[10]。
印度的区域卫星导航系统(IRNSS)2006年启动,2013年开始卫星发射,星座采用3GEO+4IGSO构形,现已发射6颗卫星,初步组成了自己区域系统。IRNSS卫星都配有激光反射器。反射器内接圆直径38 mm,反射器数量40个,轨道倾角45°,误差0.5″,除IRNSS-1A外,其他卫星设计寿命12年。列入国际ILRS 组织观测的有IRNSS-1B、IRNSS-1C、IRNSS-1D、IRNSS-1E、IRNSS-1F星[10]。
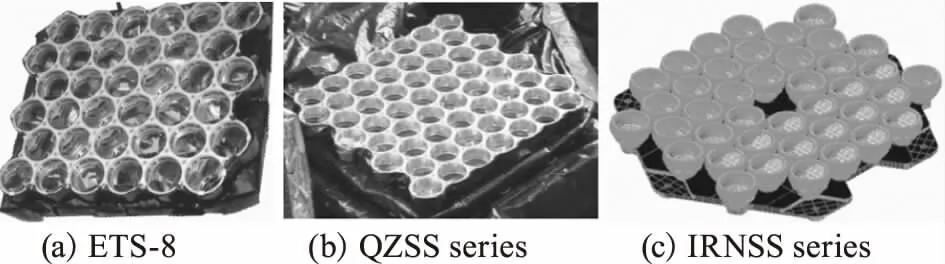
图8 日本、印度卫星反射器Fig.8 LRR of Japan and India satellite
4 主要技术问题和发展方向
4.1 主要技术问题
导航星载激光反射器设计目的在于确定合理的光学和机械物理结构参数,满足卫星观测指标,同时满足必须的环境适应性要求,设计中应重点考虑下述方面问题。
4.1.1 光学设计
光学设计是激光反射器设计的核心,角反射器的形状、切割方式、尺寸、角误差、镀膜等参数决定了反射器的主要性能(发散角、最大倾斜角、有效发射面积、发射率、远场衍射光斑、速度光行差补偿、回波能量、测距精度等)[1,12,14-15]。
a)速度补偿角误差
对反射器进行速差角误差补偿是必须的[12]。由于速差(Velocity Aberration)效应,当激光光束指向卫星,出射光相对入射光方向会有一个偏离角,反射光束光斑中心会偏离SLR位置。尺寸补偿法通过设计合适的反射器尺寸可以改变SLR处的衍射光强,但反射器尺寸过小,加工不易,加之补偿后的光雷达截面太小,不利于SLR的测量。角度补偿法通过设计相应的直角面偏差可以分离出射子光束,从而增大SLR位置的激光光能密度和探测概率。
实际观测结果也表明:通过光行差补偿的反射器明显好于不补偿的反射器。俄罗斯GALILEO系列早期反射器、GPS35/36反射器、GIOVE-A、B等中高轨卫星都没有速差角补偿而明显观测率偏低,而我国设计的北斗和伽利略IOV反射器则均采用了速差补偿设计而效果良好,目前俄罗斯、日本、印度等新设计的反射器或多或少、取值不一均进行了角度误差补偿。
角度误差对于观测效果的影响大于镀膜和尺寸等因素,设计中对反射器综合角偏差和二面单角误差均要进行严格控制,以提高光学远场衍射光斑的均匀性。
b)角反射器尺寸
角反射器尺寸设计主要包括确定反射器直径和切割方式(系数),反射器直径和切割方式决定了单个角反射器的有效反射面积。
反射器的直径大小决定反射器的激光雷达截面和影响探测概率大小,应以最大光雷达截面面积为原则设计;通过考虑角度补偿分离后的6个子光束光强合成分布一致性(小于5%)而计算的直径比前一种方法偏小,虽有利于保证单个反射器环带能量的均匀性,但测距效果不如按光雷达截面设计的结果——实际上反射器阵列通常由多个反射器组成,可通过空间排列方式改善和提高分离衍射光束环的均匀性。这也是国内和国外激光反射器设计重要的一点不同[12,16]。
角反射器切割方式包括圆切割和正六边形切割,正六边形棱边切割系数决定了单块反射器有效反射面积的大小。切割系数越小,单块反射器相对反射面积越大,越有利大角度斜入射光束的反射,但安装稳定性和加工精度越难保证;圆切割工程适应性强,光学热均匀性相对较好,但损失了小部分大角度斜入射光学面积。两种切割方式在实际中均有应用,比如上海天文台的北斗系列反射器就采取了圆切割,伽利略IOV阶段就采取正六边形小棱边切割方式,只要设计得当,排布合理,均可以取得不错的观测效果。
c)镀膜
直角面镀膜能大大增加反射器的观测范围,对于低轨卫星,内全反射角仅有不到17°(对于石英玻璃)不能满足反射器的观测范围指标要求,限定了反射器必须镀膜;对于中高轨道卫星,反射率是需要解决的主要问题,镀膜虽可以增大入射有效角度,但三次反射会严重降低反射率,同时空间辐照、高低温交变也会影响膜层性能[1,12],实际观测结果表明中高轨反射器镀膜观测效果不如非镀膜,GALILEO系列镀膜反射器、GPS35/36反射器、GIOVE-A、B观测率低,数据量少印证了这一点,今后,中高轨卫星反射器非镀膜方式将成为主流。
反射器入射面镀增透膜能提高测距激光的透过率,同时一定程度上改善光学面形质量,但对增透膜长周期空间辐照适应性和高低温性能须进行进一步设计和试验验证。
不同于国内,国外如欧空局特别注意通讯卫星的ESD设计,所以反射器表面是否需镀ITO导电膜也是设计要考虑的因素。
d)角反射器表面特性
反射器的表面特性如入射和反射表面面形误差和不平度误差能改变入反射激光的光程,影响激光测距脉冲的光学传递,发散和减弱目标区域衍射能量,设计和加工中应严格确保光学表面足够的加工质量,对于高精度激光反射器,光圈数N至少应小于0.2,表面不平度优于1/10λ,尽量降低出入射激光波面畸变[12,14]。
4.1.2 结构设计
a)反射器阵列布局
相对单一反射器,多个反射器组合阵列方式可以减小合作目标的尺寸和质量,提高反射器视场角,还可形成准相位共轭作用对激光传输中因大气非均匀性引起的畸变进行光学补偿,匀化远场光斑,减小光束发散角。合理优化的空间排布可以进一步增强激光反射效率,提高探测概率和测距精度[1]。
不同于低轨反射器的球形或半圆台布阵方式,中高轨反射器结构排布通常以平面圆形、类圆形、正方形、正多边形对称阵列为主[17-18]。
反射器布局设计中,应使结构紧凑,尽量减小外包络直径尺寸,降低反射器分布影响[7],提高测距精度;应尽量提高布阵面反射器单位面积密度[17],减少非光学反射作用区,增大光学有效反射面积,增强激光反射率和探测效率;采取各种结构布局设计方法匀化或增强(例如斜置反射器)[19]反射器衍射光斑环带光场强度,提高不同或特定测距站观测概率,提升测距效果和卫星定轨精度。
b)角反射器结构
作为高精度光学器件的结构支撑,角反射器结构既要能保证组件结构的完整性,使之承受相应的力学和热环境温度载荷、辐照寿命等星载环境适应性指标,又要确保角反射器光学性能,使其光学热弹性应力对反射光束的远场能量分布的影响在合理范围内,做到最小应力安装[18],应设计合理的弹性缓冲固定结构方式和材料确保光学和机械性能。
c)材料
反射器材料的选取应符合航天标准,保证刚度、强度、韧性、耐腐蚀性等机械结构性能,满足相应的力学振动冲击、温度交变、空间环境稳定性、辐照寿命、热物理性能、材料真空出气要求和制造工艺性能要求。
为保证反射器高精指标光学要求,反射器光学材料的三向消应力、光学高均匀性、光谱特性、应力双折射、颗粒不均匀性、气泡、条纹等指标是材料设计时必须考虑的因素,出于辐照寿命、热变形等因素考虑,国内外通常选取高纯远紫外光学熔融石英玻璃作为角反射器的光学制造材料。
4.1.3 反射器光学测试和验证
单个反射器和反射器阵列制成后均应进行地面光学测试和检测,加工完毕未装配的单个反射器可采用高精度ZYGO干涉仪测试,装配后的角反射器和反射器阵列需搭建和研制专门设备。地面光学测试设备有助于更好的对反射器性能进行指标校验和光学调试[13]。
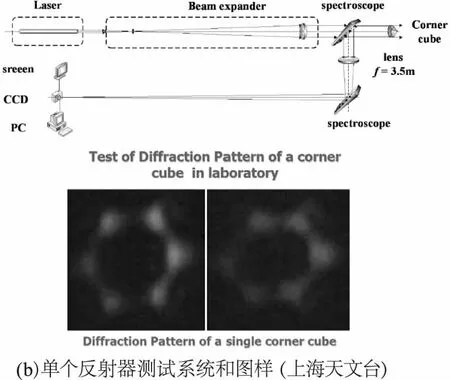

图9 激光反射器地面光学测试设备Fig.9 Ground optical test equipment of LRR
4.2 未来发展展望
卫星激光反射器伴随SLR技术经过了几十年的发展,取得了长足的进步,但对于实际星载工程化,还有许多亟需解决和探讨的技术难关。卫星激光反射器作为一种综合性学科,涉及天文学、光学、地球物理天地测量、机械、激光、数学等领域,高精度卫星测距不断对激光反射器提出了更高的性能要求,未来反射器技术发展应主要从以下几个方面着眼和考虑:
a)星载精密测距理论和方法
激光反射器作为SLR技术的空间组成部分,工程设计者应对卫星测距理论、精密定轨原理、天文轨道测算等知识进行深入学习和研究,以完善和优化反射器设计方案,更好的实现科学探测目标。
b)角反射器特性研究
角反射器特性研究包括进一步建立和完善现有的反射器光学理论和模型,对反射器光学结构参数包括速差效应补偿、光学雷达口径探测能力、表面加工精度、反射表面特性、阵列结构布局、地面动态光学测试等方面进行深层次研究,增强站点观测概率和探测精度,改进和提高现有反射器设计水平和实际应用效果,同时应借鉴电磁雷达反射器技术,对无光程差的球形反射器、宽幅光学反射器、有源放大高增益反射器等新型激光反射器进行理论研究和工程探索[20]。
c)高精密反射器光学材料和加工
高精度反射器选材和加工是制约我国反射器航天工程应用和发展的关键因素,目前,国外跨国大公司(如贺利氏、肖特、康宁等)基本垄断了中高端石英玻璃原材料市场,我国石英玻璃从上世纪八十年代开始,由部管产品下放为地方管理,企业大多规模较小、技术装备落后、产品质量无法与国外竞争,近年来经过努力虽已初步实现反射器材料的国产化,但批次产品质量还不够稳定,光学熔融技术、材料均匀性、三向消应力等核心光学指标尚需进一步提高;同时加工部门应进一步规范、完善高精反射器制造工艺,提高现有产品加工质量和成品率,对空心角反射器、异性多边反射器、非平面曲面反射器等新型反射器光学加工技术进行探索、开发和试产。
d)反射器结构环境适应性技术
反射器组件结构和材料既要满足高精光学性能,又要满足卫星地面段、发射段以及轨道段的环境和载荷要求,目前导航卫星最高寿命设计已达25年、高低温交变温差达330 ℃,随着今后我国更多中高轨卫星专项、航天深空探测任务的实施,对反射器结构和材料的力学、热、辐照等环境适应性提出了更高的要求,有必要对反射器组件的结构封装、材料选取、减振隔冲、ESD设计、辐照防护、热控管理等方面进行更深度细化研究。
e)轻量化、小体积反射器设计。
轻质量、小体积是航天产品经济性永恒的追求,目前国内外反射器结构依旧采用铝基金属材料,空心角反射器制造技术发展以及大量高强度高模量复合结构材料的成熟应用,为反射器设计轻量化提供了方向和技术支撑。
5 结 论
导航卫星激光反射器是星载反射器应用的一个主要分支,本文主要就导航卫星激光反射器国内外技术发展现状、光机设计主要问题、未来趋势和研究发展方向进行了简要的评述、讨论和展望。目前,激光反射器作为标配有效载荷,已在我国现阶段载人航天、卫星导航、空间站对接等领域到了初步应用,随着卫星激光测距技术的不断成熟和推进,未来将继续在星地测量、航天器编队、探月、远距离深空探测等航天广阔领域发挥重要作用。
参考文献:
[1] WANG Qiang,GUO Yanneng,WANG Xiaobing,et al.Present status and progress of laser cooperative targets for SLR[J].Laser & Optoelectronics Progress,2005,42(5):20- 23.(in Chinese)
万强,郭延能,王小兵,等.卫星激光测距合作目标技术现状和进展[J].激光与光电子学进展,2005,42(5):20- 23.
[2] LIU Jiyu.The distance measurement evolution in 60 Years[J].Hydrographic Surveying and Charting,2010,30(2):74-78.(in Chinese)
刘基余.60年距离测量的演变[J].海洋测绘,2010,30(2):74-78.
[3] ZHAO You,LIU Nailing.Satellite laser ranging:status and development[J].Bulletin of Surveying and Mapping,1999(12):23-26.(in Chinese)
赵有,刘乃苓.卫星激光测距的发展和现状[J].测绘通报,1999(12):23-26.
[4] ZHANG Zhongping,YANG Fumin.New development of satellite laser ranging[J].Progress in Astronomy,2001,19(2):283-288.(in Chinese)
张忠萍,杨福民.卫星激光测距的新进展[J].天文学进展,2001,19(2):283-288.
[5] YANG Chenhua,MEI Suisheng,et al.Handbook of laser and infrared technology[M].Beijing:National Defense Industry Press,1990.(in Chinese)
杨臣华,梅遂生,等.激光与红外技术手册[M].北京:国防工业出版社,1990.
[6] ZHAO Gang.Studies on applications of SLR precise orbit determination in china’s satellite projects[D].Beijing:University of Chinese Academy of Sciences,2013:1-58.(in Chinese)
赵罡.激光测距精密定轨在中国卫星工程中的应用[D].北京:中国科学院大学,2013:1-58.
[7] FAN Jianxing.Research on design and distribution effects of satellite laser ret roreflectors[D].Hangzhou:Zhejiang University,2000.(in Chinese)
范建兴.卫星激光反射器的设计和分布效应研究[D].杭州:浙江大学,2000.
[8] LIU Lin,WANG Haihong,HU Songjie.Summary on satellite orbit determination[J].Journal of Spacecraft TT & CTechnology,2005,24(2):28-34.(in Chinese)
刘林,王海红,胡松杰.卫星定轨综述[J].飞行器测控学报,2005,24(2):28-34.
[9] CHEN Zhonggui,SHUAI Ping,QU Guangji.Technical characteristics and development trend of modern satellite navigation system[J].Scientia Sincia,2009(4):686-695.(in Chinese)
陈忠贵,帅平,曲广吉,现代卫星导航系统技术特点与发展趋势分析[J].中国科学,2009(4):686-695.
[10] 激光测距服务(ILRS)网:https://ilrs.cddis.eosdis.nasa.gov/missions/satellite_missions.
[11] ZHONG Shengyuan,XU Guangping,WU Jian.Study of the diffraction light intensity in the far-field on the satellite laser cube corner reflector[J].Laser & Infrared,2009,39(2):128-132.(in Chinese)
钟声远,徐广平,吴键.卫星激光角反射器的远场衍射光强研究[J].激光与红外,2009,39(2):128-132.
[12] ZHONG Shengyuan,LI Changzhen,CHEN Nianjiang,et al.Study of the laser retro-reflector on navigation satellities[J].Laser & Infrared,2011,41(8):834-839.(in Chinese)
钟声远,李长桢,陈念江,等.导航卫星激光后向反射器研究[J].激光与红外,2011,41(8):834-839.
[13] ZHANG Zhongping,ZHANG Haifeng,CHEN Wanzhen,et al.Design and performances of laser retro-reflector arrays for beidou navigation satellites and SLR observations[J].Advances in Space Research,2014,54(5):811-817.(in Chinese)
张忠萍,张海峰,等,北斗导航卫星激光反射器设计性能和SLR观测[J].空间研究进展,2014,54(5):811-817.
[14] NIE Hui,WENG Xingtao,LI Song,et al.Optical design of the retro-reflector in space for laser ranging[J].Optical Technique,30(1):48-50.(in Chinese)
聂辉,翁兴涛,李松,等.星载激光测距合作目标的光学设计[J].光学技术,2004,30(1):48-50.
[15] WENG Xingtao,NIE Hui,HEPingan,et al.Planeness issues of reflecting surfaces on a cube corner retroreflector[J].Optical Technique,2002,28(1):70 -73.(in Chinese)
翁兴涛,聂辉,等.角锥棱镜的直角面面形问题[J].光学技术,2002,28(1):70-73.
[16] 虞孝舜.卫星角反射器设计[J].激光与红外,1979,9(4):1-7.
[17] WANG Guchang,WANG Xiaobing,SUN Bin,et al.A kind of compact design on cube corner retro-reflector array in laser cooperative target on satel lite[J].Chinese Journal of Lasers,2004,31(6):673-676.(in Chinese)
王古常,王小兵,孙斌,等.卫星激光合作目标中角反射器的密接布阵设计[J].中国激光,2004,31(6):673-676.
[18] LV Huachang,GUO Lina,ZHANG Shengyuan.Study of the mechanical stress for the laser retro-reflector to influence on the far field diffraction pattern[J].Laser & Infrared,2010,40(10):1039-1042.(in Chinese)
吕华昌,郭丽娜,钟声远,等,卫星激光后向反射器结构应力对衍射能量分布影响研究[J].激光与红外,2010,40(10):1039-1042.
[19] WANG Yuanming,ZHANG jie,TANG Shugang,et al.Tilted angle design for space-borne laser reflector[J].Geomatic Science and Engineering,2014,(6):22-28.(in Chinese)
王元明,张洁,唐树刚,等.星载激光反射器的斜置角设计[J].测绘科学与工程,2014,(6):22-28.
[20] LIU Liang.Research and design for RADAR passive reflector of wide-angle[D].Nanchang:Nanchang HangkongUniversity,2014:3-13.(in Chinese)
刘良,雷达宽角无源反射器研究与设计[D].南昌:南昌航空大学,2014:3-13.