卫星激光测距系统中图像处理子系统设计
2018-04-27韩兴伟
张 楠,韩兴伟
(中国科学院国家天文台长春人造卫星观测站,吉林 长春 130117)
1 引 言
卫星激光测距的原理是通过精确测量激光脉冲在地面观测站和卫星之间的往返时间间隔,从而计算出目标到地面观测站的距离。卫星激光测距技术是大地空间测量的主要技术之一,在人造卫星或航天器的精密测定、精密时间比对等方面有着重要的科学应用,尤其在地球动力学和大地测量学领域有着重要贡献[1-2]。卫星激光测距技术涵盖多个学科领域,在各学科发展的推动下,卫星激光测距技术主要朝着提高测量精度和测距系统的自动化水平这两个方向发展[3-4]。
通过软硬件的协同配合来代替人的部分操作,最终实现设备的稳定工作和长期运行,能够大大降低人力资源,因此对卫星激光测距系统的自动化研究具有积极的意义和实用价值。本文介绍了一套用于卫星激光测距系统的图像处理子系统,该系统集图像采集、存储、显示、目标定位功能于一体,通过图像处理方法,分别识别出卫星和激光后向散射光尖,为控制系统提供根据偏差量信息,控制系统依据偏差量修正卫星到视场中心闭环跟踪,同时将激光出光方向锁定到视场中心,实现对激光发射光束和望远镜指向的自动调整。通过实验测试,该子系统操作方便,运行稳定,有助于提高卫星激光测距系统的自动化水平。
2 系统框架
本文设计的图像处理子系统结构如图1所示。硬件部分负责获取观测卫星与激光光束图像,并为算法提供计算机平台;软件部分主要实现实时图像采集、实时计算激光束光尖和卫星的位置坐标数据,并通过网络通讯的方式将激光光束光尖位置偏差量和卫星位置偏差量发送给控制系统,由控制系统根据偏差量完成后续的激光束指向调整以及目标预报修正。
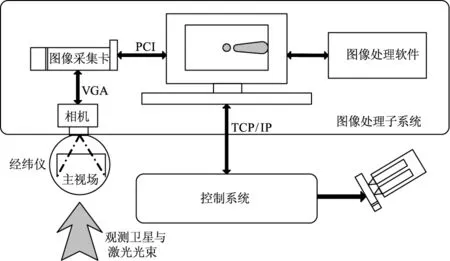
图1 系统结构图Fig.1 Block diagram of the system
如图1所示,硬件部分包括CCD相机、图像采集卡以及计算机。相机与图像采集卡组成图像采集设备,计算机与采集卡相连接,作为图像的存储、处理和显示设备,负责图像采集、存储、目标提取功能,同时负责与控制系统进行通讯。
软件部分是在VC框架下进行模块化开发,其结构如图2所示,主要可以分为:图像采集、数据处理和数据传输3个部分。图像采集模块,在连接相机与图像采集卡并且启动后,实时采集激光光束及观测卫星图像,并通过PCI总线发送给图像处理计算机;数据处理模块对实时采集的原始图像进行图像处理,并计算卫星及光尖的位置坐标,处理后的图像与计算得到的坐标数据均在人机交互界面上显示;数据传输模块通过网络将卫星及光尖的位置偏差反馈给控制系统。卫星与光尖的识别均可以根据需求选择自动识别或手动选择两种方法。
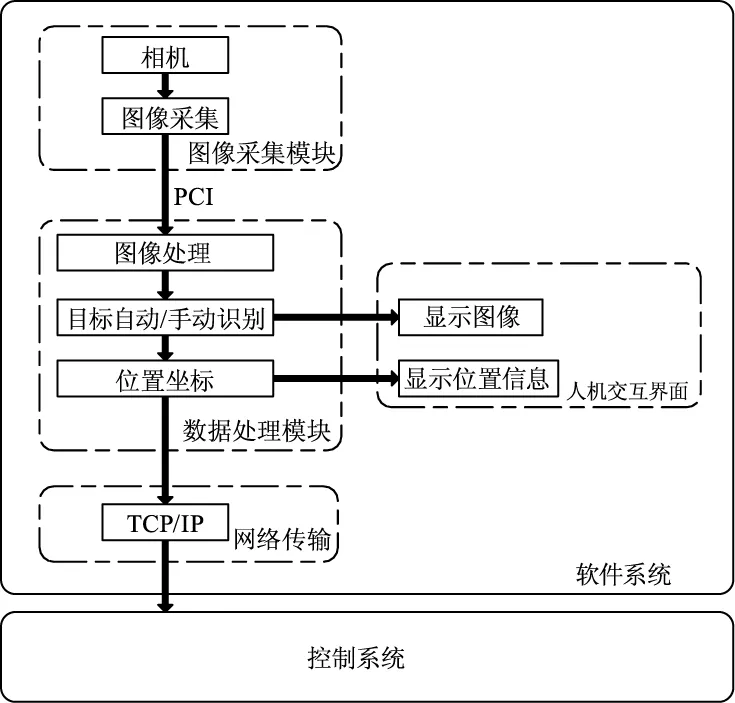
图2 软件系统框图Fig.2 Block diagram of the software
3 图像处理算法
对采集到的图像进行处理,主要包括目标识别和目标定位两部份,主要图像处理算法流程如图3所示。

图3 图像处理算法流程Fig.3 Program flowchart of the image processing method
为了防止图像中夹杂噪声对目标识别的影响,首先要对对原始图像进行滤波去噪。本文采用Butterworth低通滤波器,该滤波器的通带和阻带间没有明显的跃变,处理后图像的模糊程度会减少,所以非常适合图像的预处理工作。
3.1 目标识别
目标识别实际上是一个图像分割的过程,首先将目标同背景分离开,然后将卫星与激光光束分离开。
结合图像特点和算法复杂程度,采用全局阈值分离目标与背景。全局阈值的选取采用基于统计的阈值算法[5-6],计算公式如式(1)所示:
T=V+α(P-V),0<α<1
(1)
其中,V为图像的平均灰度;P为峰值灰度;α为比例系数。根据实验测试,α选在0.3左右比较合适。
这种自适应阈值求取方法利用图像的峰值灰度与平均灰度进行比较得到的灰度阈值便可以检测出目标,能够随背景变化及目标信号大小自动调整阈值大小。
获取到阈值后,采用连通域算法[7]对灰度大于全局阈值的像素点进行聚类识别,具体步骤如下:
(1) 从左至右,从上至下逐个像素扫描;
(2) 如果像素点的灰度值大于阈值T,则:
①如果左前一点和上一点均为背景,则当前点加新标记;
②如果左前一点或上一点有一个标记,则复制这个标记。
③如果左前一点和上一点均为已加标记,则当前点复制左点标记。
(3)重复步骤(2)直到扫描完图像。
(4)将标记相同的像素点合并。
经过连通域分割处理后,图像中的目标表现为相邻的具有相同标记点的像素点的集合。最后根据卫星与激光光束的面积差异[8],进行进一步的目标分离,分别得到卫星图像与激光束图像,供后续处理使用。
3.2 目标定位
对于卫星定心,采用了带阈值的质心法[9]计算卫星质心,计算公式如式(2)所示。该方法相当于在原图像中去除背景,仅对大于背景阈值T的像素点求取质心,相比传统的质心法具有更高的精度。
(2)
其中,

(3)
式(2)、(3)中,f(x,y)为原始图像灰度值,F(x,y)为经过修正的图像灰度值,T为所取得阈值。
对于激光光尖定位,首先采用边界跟踪法[10]提取激光光束的边缘。边界跟踪的基本方法是:边缘跟踪从图像左上角开始逐像素扫描,当遇到边缘点时,则开始顺序跟踪,直到其后续点再没有新的后续点。边界跟踪对于边界点的判断精确,跟踪后产生的轮廓边缘宽度只有一个像素,而且整个边界连续无中断。
在获得激光束边缘轮廓后,用最小二乘法进行直线拟合,上下边缘各自可以拟合出一条直线,计算2条直线的交点,近似为激光束光尖坐标[11]。
4 测试结果
根据第2 、3节介绍的图像处理子系统的总体框架和具体的处理算法,以Windows7 操作系统为开发环境,用VC++和Qt作为开发工具,采用模块化设计思想进行相关功能模块的开发,完成了卫星激光测距图像处理子系统的软件程序,系统的软件界面如图4所示。

图4 图像处理系统软件界面Fig.4 Screenshot of software interface
本图像处理子系统现已投入实际应用,与卫星激光测距系统配合测试结果表明,该系统完成了预定的功能,操作方便,运行稳定。给出了本系统采集的图像和进行目标定位的结果,如图5所示。
图像处理子系统应用于实际激光测距系统,偏差量误差在3"以内,可以满足卫星激光测距系统的精度要求,具有实际意义和应用价值。
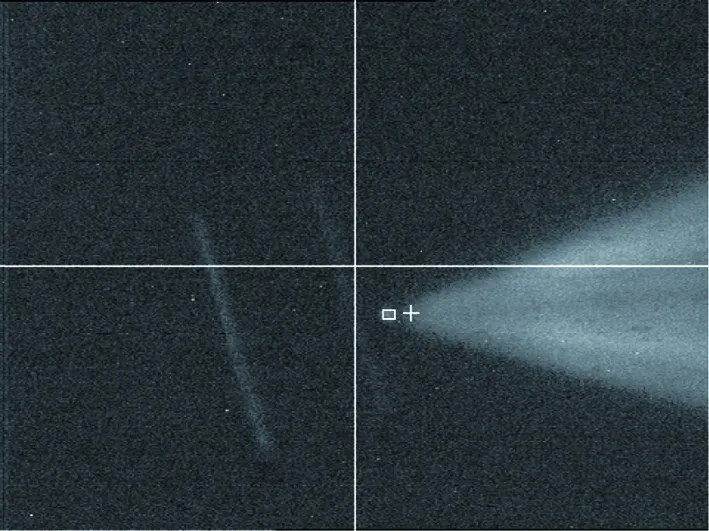
图5 目标定位图Fig.5 Result of target location
5 结束语
本文根据实际应用的需求,实现了一套应用于卫星激光测距系统的图像处理子系统。根据卫星激光测距系统所获得图像的特点,采用图像处理技术来解算卫星和激光束光尖相对于视场中心的位置偏差量,并转换成跟踪偏差值,进而由控制系统依据此偏差值重新引导望远镜进行跟踪并控制光束指向目标。
在卫星激光测距系统中引入图像处理方法,在一定程度上改善了现有卫星激光测距系统中目标预报偏差和激光不能精确指向的问题,减少了人工操作的工作量,提高了卫星激光测距系统的精度和工作效率。该图像处理子系统稳定可靠,满足卫星激光测距系统对测量数据的要求。
参考文献:
[1] LIU Yang.Research on comprehensive pointing model of telescope based on SLR tracking data [D].Changchun:Changchun Observatory,National Astronomical Observatories,CAS,2012.(in Chinese)
刘洋.利用SLR观测数据修正经纬仪指向模型的研究[D].长春:中国科学院国家天文台长春人造卫星观测站,2012.
[2] SHAO Baodong.The development of control software in SLR system[D].Changchun:Jilin University,2012.(in Chinese)
邵宝东.卫星激光测距控制软件的开发 [D].长春:吉林大学,2012.
[3] HUANG Baoli.Research of control system improvement based on digital image processing technology for SLR [D].Changchun:Changchun Observatory,National Astronomical Observatories,CAS,2014.(in Chinese)
黄宝利.基于数字图像处理技术的卫星激光测距系统改进的研究[D].长春:中国科学院国家天文台长春人造卫星观测站,2014.
[4] DONG Xue.Research of high repetition space debris laser ranging system[D].Changchun,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Science,2014.(in Chinese)
董雪.高重复频率空间碎片激光测距系统研究[D].长春:中国科学院长春光学精密机械与物理研究所,2014.
[5] LIU Gang,SU Xiuqin,HU Xiaodong,et al.Real-time image tracking based on adaptive threshold in high speed TV [J].Acta Photonica Sinica,2005,34(8):1262-1265.(in Chinese)
刘刚,苏秀琴,胡晓东,等.高速电视下基于自适应阈值的实时图像跟踪[J].光子学报,2005,34(8):1262-1265.
[6] SUN Rongyu,ZHAO Changyin.An adaptive threshold method for improving astrometry of space debris CCD images.Advances in Space Research,2014,53:1664-1674.
[7] ZHANG Guangjun.Star identification Beijing:National Defense Industry Press,2011.(in Chinese)
张广军.星图识别[M].北京:国防工业出版社,2011.
[8] HUANG Baoli,HAN Xingwei,ZHANG Nan,et al.Axis correction of satellite laser ranging system based on image processing technique [J].Laser & Infrared,2014,44(7):715-719.(in Chinese)
黄宝利,韩兴伟,张楠,等.卫星激光测距系统的指向偏差修正[J].激光与红外,2014,44(7):715-719.
[9] ZHANG Yigong,LI Binhua,YANG Lei,et al.An image processing system for a multi-function astronomical theodolite[J].Astronomical Research and Technology,2014,11(1):65-71.(in Chinese)
张益恭,李彬华,杨磊,等.多功能天文经纬仪图像处理系统[J].天文研究与技术,2014,11(1):65-71.
[10] LV Yunfei.An object boundary following algorithm[D].Dalian:Dalian Maritime University,2014.(in Chinese)
吕云飞.一种目标边界跟踪算法[D].大连:大连海事大学,2014.
[11] WANG Yuanyuan,LIU Yanhong,HU Yuanhang,et al.Research on image processing methods for measuring laser pointing deviation in satellite laser ranging system [J].Journal of Northeast Normal University:Natural Science Edition,2012,44(4):66-70.(in Chinese)
王媛媛,刘艳红,胡元航,等.卫星激光测距系统中激光指向偏差测量的图像处理方法研究[J].东北师大学报:自然科学版,2012,44(4):66-70.