一种开关磁阻电动机瞬时转矩在线估算方法
2018-04-26陈海进李锦阳
陈海进,李锦阳
(南通大学,南通 226019)
0 引 言
开关磁阻电动机(以下简称SRM)具有结构简单、价格低廉、调速范围广、可靠性高等一系列优点,在工业应用中越来越受到青睐。但由于其工作磁路饱和、磁滞效应和涡流等因素产生的非线性特性,很难对其进行精确而快速的建模[1],从而很难获得精确的磁链和转矩等参数。然而瞬时转矩大小的获取对SRM瞬时转矩控制及转矩脉动的抑制等具有重要作用,因此有必要对转矩测量估算技术进行研究。文献[2]搭建了SRM转矩测试系统实验平台,使用扭矩传感器直接测量转矩,这种方法虽直接方便,但扭矩传感器既复杂昂贵又增大了系统的体积。文献[3-4]分别使用BP神经网络和模糊神经网络对SRM的转矩特性建模,以获得转矩与相电流及位置角之间的映射关系,之后通过测量相电流和位置角获取瞬态转矩。神经网络建模虽具有较强的鲁棒性和自适应性,但对处理器要求较高。其次,文献[3]的训练样本使用的是MATLAB中的SRM电机模型,实用性不足。文献[4]的训练样本通过实测电机的静态转矩特性获得,此过程除了需要扭矩传感器,还需要位置传感器和转子夹紧装置来将转子固定在特定位置,不仅耗费额外空间,增加了系统复杂度,而且在转矩较大时夹紧装置很难保持转子绝对静止。文献[5]通过函数拟合法来表示转矩与相电流及位置角的关系,将测量到的相电流与位置角信号输入PC机计算出瞬时转矩,该文将某相转矩近似地表示为磁链对位置角的偏导数与电流的乘积,此处会具有相当的误差;其次实时测量时需要PC机进行计算,相对于以微控制器为核心的控制系统,系统体积和成本大大提高。
本文提出了一种基于微控制器的瞬时转矩在线估算方法,无需转子夹紧装置和位置传感器即可获取电机的转矩特性,电机运转时通过测量相电流和位置角估算瞬时转矩。
1 技术方案
1.1 转矩估算原理
该方法是通过实时测量每一相的电流和位置角,然后根据转矩特性表使用双线性插值法计算得到一相转矩,将所有相的瞬时转矩相加即得到该时刻电机的合成转矩。以实验所用的三相12/8 SRM为例,测量方法如图1所示。

图1 转矩测量方法示意图
由图1可知,转矩特性表是估算三相转矩的前提,因此需先获取转矩特性。
1.2 转矩特性的获取
1.2.1 原理
电机的转矩特性可由磁链特性计算得到,因此在不使用扭矩传感器时需先获取磁链特性。不考虑互感、涡流和磁滞效应的影响,处于某个位置θ*的一相绕组磁链可以由下式计算得到:

(1)
式中:t*和i*分别是对应位置角为θ*的时刻和相电流;u(t)和i(t)分别是该相t时刻的电压和电流;ψ(0)是0时刻的磁链值,由于0时刻无电流而为0;R是该相绕组电阻。R会随温度而变化,实验时需要在线测量,使用如下算法:
(2)
式中:tc是一个电气周期内电流归零的时刻。为了用采样得到的电压电流数据计算磁链,式(1)可以根据梯形积分公式改写为离散形式[6]:
R[i(p)+i(p-1)]}+ψ(0)
(3)
式中:Δt为采样间隔,索引p对应时间t*且索引0对应0时刻。根据式(3)即可求得某个位置θ*的磁链。
由磁阻最小原理可知,当定子某相绕组通电时,所产生的的磁场由于磁力线扭曲而产生切向磁拉力,试图使相近的转子旋转至其轴线与该定子轴线对齐的位置,即磁阻最小位置。因此根据各相对称的特点,通过给不同相通电,可以使三相12/8电机一相转子分别稳定在4个不同位置,施加电压激励从而测得4条电压电流离散曲线。由式(3),可将其转换为磁链-电流离散曲线。再对离散曲线进行插值计算,即可获得4个位置下测量范围内任意电流值对应的磁链值。由于磁链与位置角的关系是一个周期性的波形,因此可以用傅里叶级数来表示。文献[7]使用三阶傅里叶级数来表示磁链与位置角的关系,而实验所用三相12/8电机可以获得4个位置下的磁链特性曲线,因此可以提高精度,使用四阶傅里叶级数表示电流为i*时任意位置的磁链:
ψ(i*,θ)=ψ0(i*)+ψ1(i*)cos(Nθ)+
ψ2(i*)cos(2Nθ)+ψ3(i*)cos(4Nθ)
(4)
式中:N代表电机的转子极数;ψk(i*)是电流为i*时傅里叶级数的系数。由4条磁链曲线可以列出4个方程:

(5)
傅里叶级数的系数可以由下式算出:

(6)
系数算出后便可由式(4)求得电流为i*时任意位置对应的磁链。电流从0以一定步长遍历到测量上限值,再通过插值的方法即可得到电机的完整磁链特性。
转矩T可通过磁共能W对位置角θ的偏导数计算得出:
(7)
由式(7)即通过磁链特性得到转矩特性。
1.2.2 实现
通过给不同相通电,三相12/8 SRM一相转子可以稳定在4个位置,分别对应0°,7.5°,15°,22.5°(以不对齐位置为0°)。因此,为实现上述的方法,以测量C相为例,需执行如图2所示的步骤。
图2中,J表示为了使C相处于不同位置所需通电的相。当J为C时,转子会旋转至对齐位置,即22.5°位置;当J为BC时,根据各相对称性,转子会转至B相对齐位置与C相对齐位置的中点处,相当于C相的15°位置;当J为B时,B相会最终处于对齐位置,相当于C相的7.5°;当J为AB时,转子最终转至0°位置。值得注意的是测量时施加电压激励的对象K。文献[8]中,对电机三相同时通电以施加激励,但三相同时通电互感较大,产生较大误差。为使转子位置保持稳定,同时各相之间的互感尽可能小,因此K的实际设定如图2中所示。

图2 测量流程图(以C相为例)
按照上述步骤测得4个位置的电压电流曲线后,根据文中介绍的原理可算出转矩特性。将转矩特性转换为二维查找表的形式(横纵坐标分别对应电流,位置角,表格内为转矩值)存储于微控制器中,即完成了转矩特性表的获取。
1.3 转矩的在线估算
电机运转过程中模数转换器(以下简称ADC)每采集一组相电流和位置角,控制器便根据转矩特性表使用插值法计算得到对应的瞬时转矩值。这里插值算法选择了双线性插值法,其相较于最临近插值法拥有更高的精确度,在微控制器中的运算速度相比其它高次插值算法大幅提高。将插值得到的某时刻三相转矩值相加即得到该时刻电机的合成转矩,用微控制器中的数模转换器(以下简称DAC)输出即可通过示波器实时观测转矩波形。
2 实验验证
为了验证上面的方案,搭建了实验平台。硬件部分包括SRM,微控制器,电流电压检测电路,位置传感器,功率变换器,负载,直流稳压源等。其中所采用的电机为三相12/8 SRM。控制器采用的是STM32F103R,其内嵌了适用于电机控制的定时器和ADC。电流电压检测电路中分别使用霍尔电流和霍尔电压传感器,可以将电流和电压转化到ADC的检测范围之内。功率变换器采用的是不对称半桥结构。负载为磁粉制动器。
依照文中的步骤进行实验,得到的4条磁链曲线如图3所示。
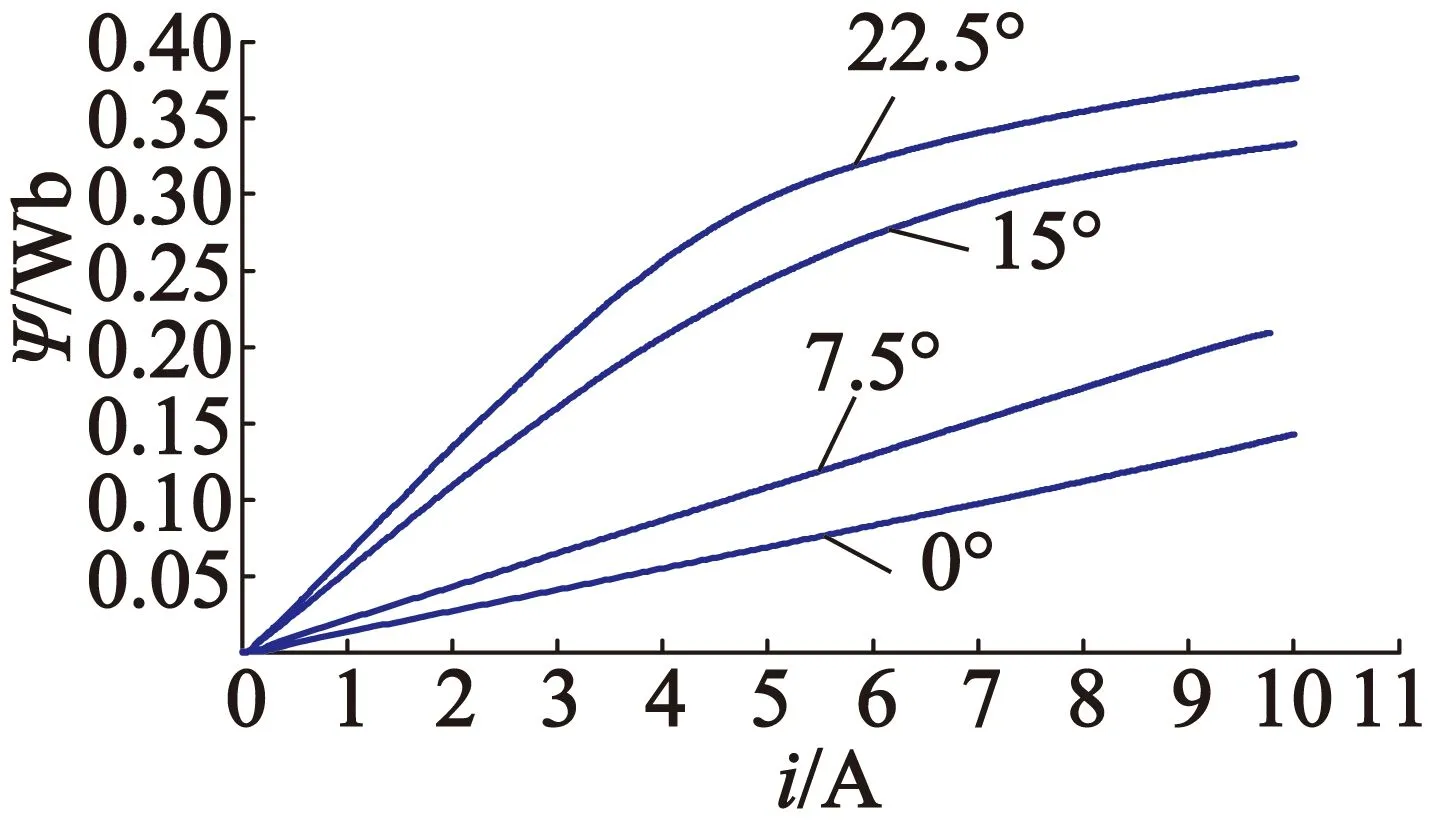
图3 4个关键位置的磁链特性曲线图
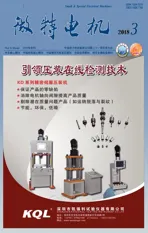
四阶傅里叶级数表示的完整磁链特性曲线图如图4所示,其中每条曲线代表某个位置下磁链与电流的关系,图中只列出了部分位置下的曲线。

图4 完整磁链特性曲线图
转矩特性如图5所示,图中只列出了部分电流值对应的转矩与位置角的关系。
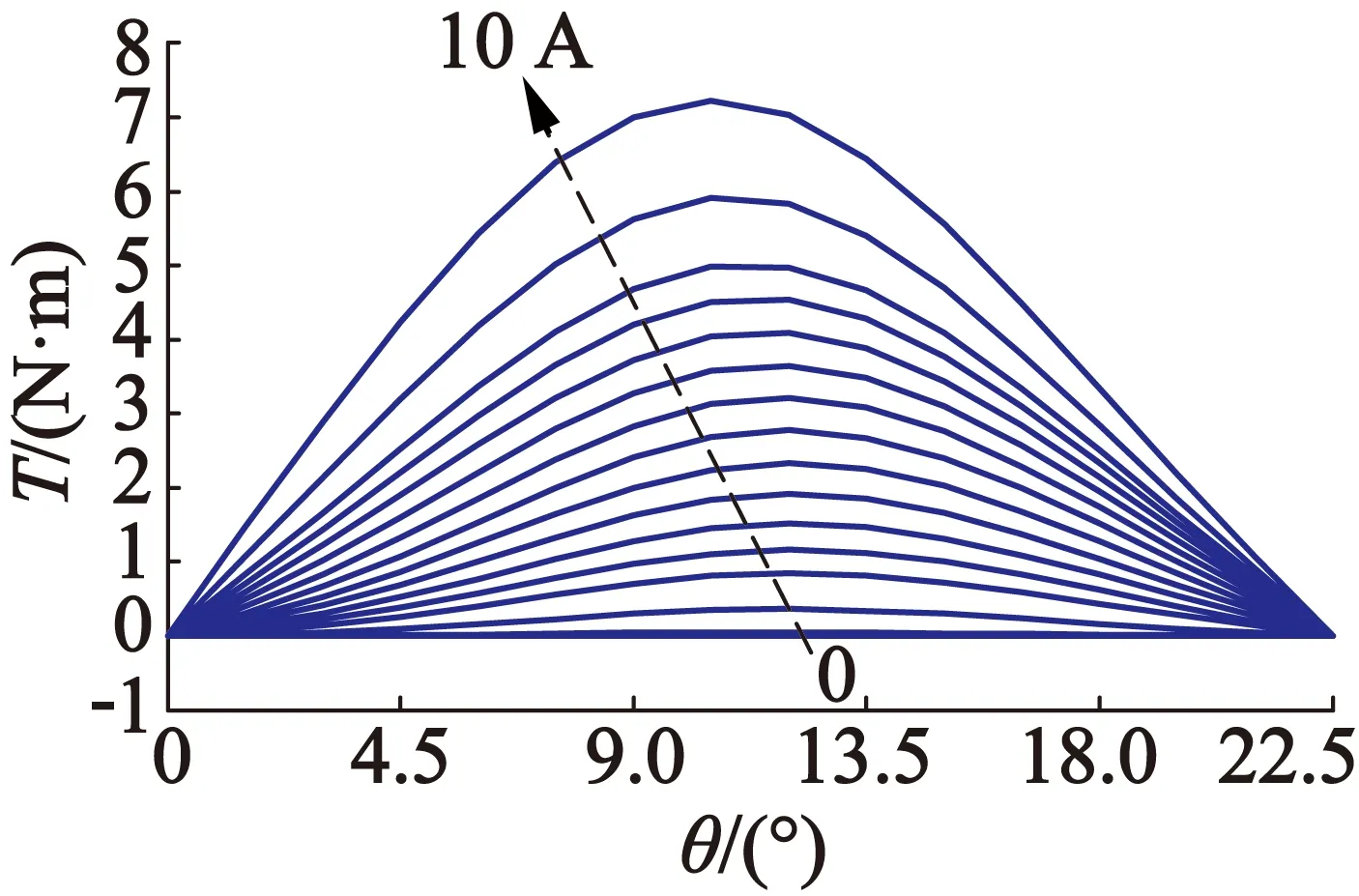
图5 转矩特性图
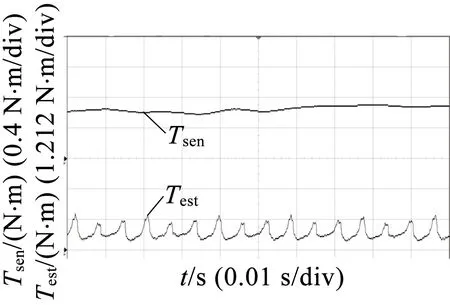
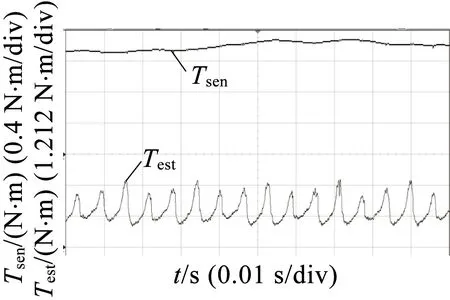
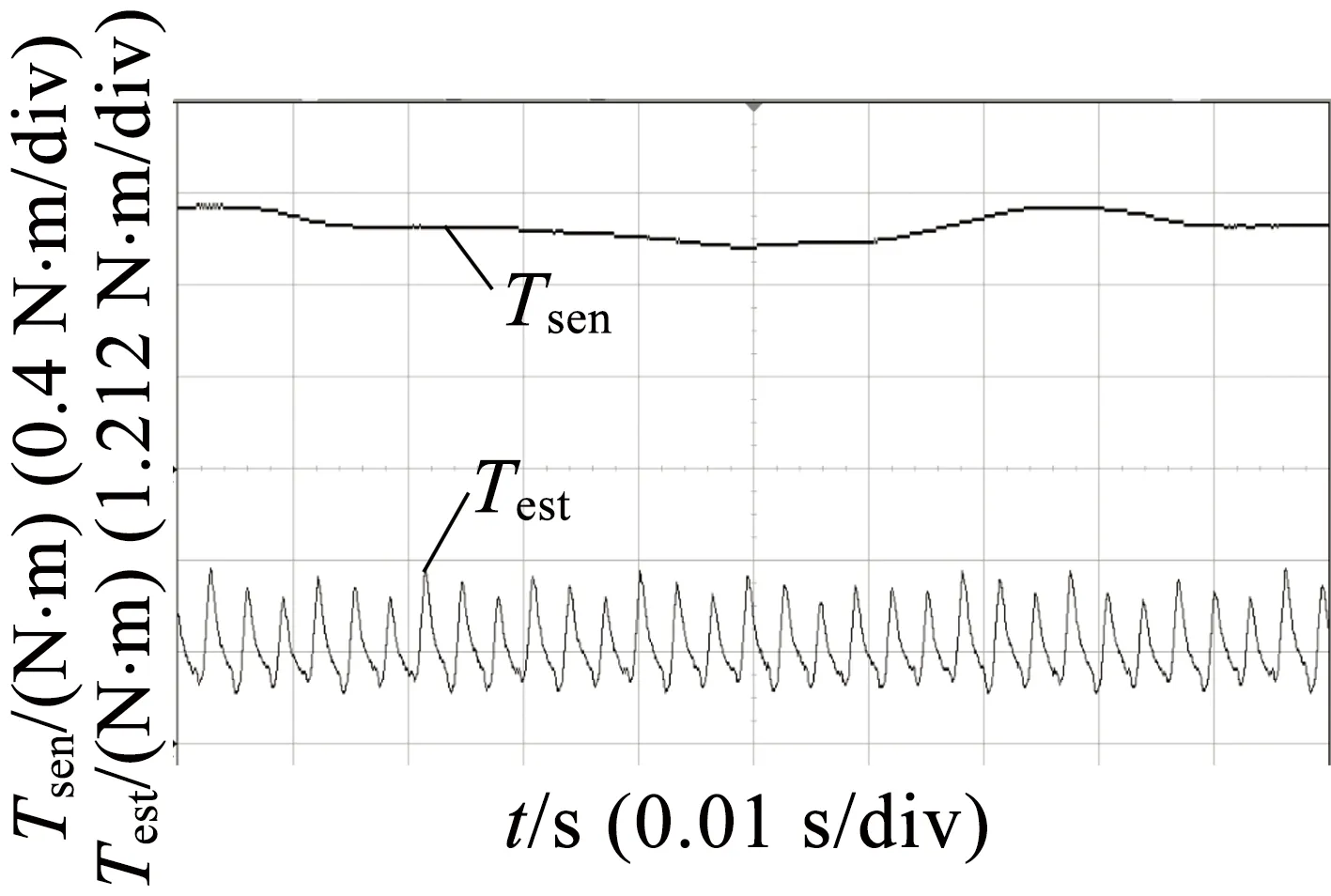
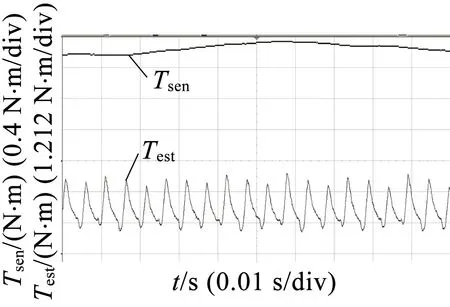
为了将在线估算结果Test和扭矩传感器的测量结果Tsen进行对比,进行了多组实验。图6的控制方式为电流斩波控制,转速400 r/min。图7为角度位置控制,转速800 r/min。图6、图7分别为不同负载下(从图6(a)到图6(d)负载递增)下的测量结果。
(a)
(b)

(c)
(d)
图6采用电流斩波控制,转速400 r/min时,不同负载下的测量结果

(a)

(b)
(c)
(d)
图7采用角度位置控制,转速800 r/min时,不同负载下的测量结果
根据图6和图7,可得到对比结果如表1和表2所示。

表1 电流斩波控制,转速400 r/min时,4组测量数据对比
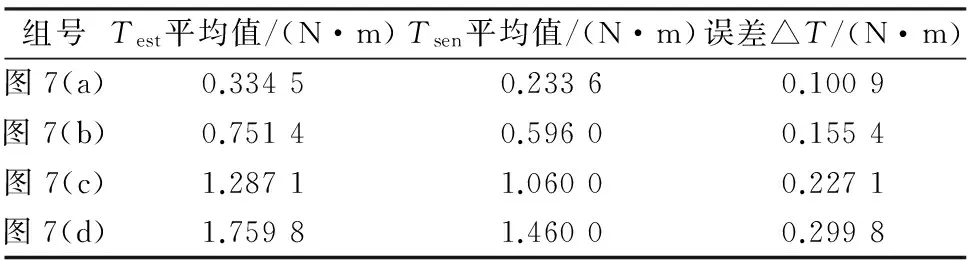
表2 角度位置控制,转速800 r/min时,4组测量数据对比
从对比结果可以看出,转矩估算的结果与扭矩传感器的测量结果数值上基本吻合,验证了方案的可行性。观察误差一栏可以发现,在角度位置控制下,高速运行时误差相对较大,并且随着负载的增大而增大。这可以从电机损耗的角度解释,该方法估算得到的转矩,由于未考虑损耗问题,可以视为输入功率Pin对应的转矩,而扭矩传感器测得的转矩则可视为电机轴上的功率Pshaft对应的转矩。图8为SRM损耗示意图。由图8可知,从输入功率Pin到最终电机轴上的输出功率Pshaft,共有铁损、铜损、机械损耗和杂散损耗4种损耗。其中,铜损与电流有效值的平方成正比。铁损除了与电机铁心材料有关外,还与电机铁心的磁场有密切关系。机械损耗一般由轴承摩擦损耗和通风损耗组成,主要与转速、加工精度、润滑脂及温度、电机结构等有关。杂散损耗原因很复杂,一般可以按铜损、铁损、机械损耗三者之和的7%计算[9]。综上,可以得出电机在高速运转时,铜损、机械损耗、杂散损耗相对低速运转时会明显增大,所以表2中误差明显大于表1。在转速一定时,随着负载的增大,铜损会随着电流的增大而增大,因此表2中4组误差递增。而表1中由于误差本身较小,因此4组误差递增关系不明显。
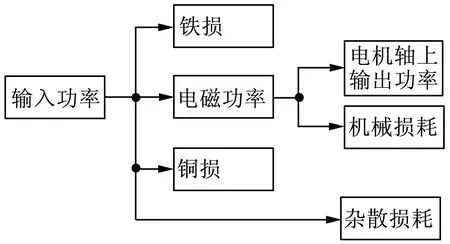
图8 SRM损耗示意图
3 结 语
本文介绍了一种SRM瞬时转矩在线估算方法,它采用一种简单快速的方法获取电机转矩特性,无需位置传感器和转子夹紧装置。之后,通过测量相电流和转子位置角,使用双线性插值计算,得到瞬时转矩。该方案的可行性得到了实验验证。实验所用样机为三相12/8 SRM,该方法在其它结构SRM上亦可使用。
[1] 吴红星,孙青杰,黄玉平,等.开关磁阻电机非线性建模方法综述[J].微电机,2014,47(5):83-92.
[2] 张剑.开关磁阻电机转矩测试系统实验平台建立[D].邯郸:河北工程大学,2015.
[3] 李大鹏,代尚芳.基于BP神经网络的开关磁阻电机转矩观测器[J].伺服控制,2012(1):38-40.
[4] 郑洪涛,李玉榕,乔斌,等.基于模糊神经网络开关磁阻电动机转矩观测[J].仪器仪表学报,2002,23(4):351-360.
[5] 孙建忠,张凯,王诗琦,等.基于Labview的开关磁阻电机瞬态转矩测试系统研究[J].大连理工大学学报,2013,53(3):443-446.
[6] CHEN H J,JING W P.Flux linkage determination of the switched reluctance motor from measurable quantities at steady-state operations[J].IET Electric Power Applications,2011,5(2):210-216.
[7] SALMASI F R,FAHIMI B.Modeling switched-reluctance machines by decomposition of double magnetic saliencies[J].IEEE Transactions on Magnetics,2004,40(3):1556-1561.
[8] SHEN L,WU J H,YANG S Y,et al.Fast flux linkage measurement for switched reluctance motors excluding rotor clamping devices and position sensors[J].IEEE Transactions on Instrumentation and Measurement,2013,62(1):185-191.
[9] 杨丽.开关磁阻电机的损耗及热分析研究[D].南京:南京航空航天大学,2006.