基于纹理特征的红外图像溢油检测算法研究∗
2018-04-26阮沁馨田金文
阮沁馨 田金文
(华中科技大学自动化学院多谱信息处理技术国家级重点实验室 武汉 430074)
1 引言
随着世界经济的发展,人们对石油的需求不断增加,由石油加工提炼的产品运用广泛。石油的巨大需求量推动着石油相关行业的蓬勃发展,石油的海上开采以及海上运输规模日益增大,随之而来的还有频频发生的海上溢油事故;不合乎规范的工业废油的排放使得内河生态环境受到污染,也严重危害了沿河居民的身体健康。溢油所带来的污染问题,对当地以及连通区域的生态系统带来的影响是长久不能消散的。由此,在溢油事故发生之前对海面的密集监测,在溢油发生时的快速识别以及发现溢油区域后的回收工作都显得尤为重要。
用于溢油检测的传感器主要有光学传感器、激光传感器、微波传感器等。其中,光学传感器包括可见光传感器、红外传感器、近红外传感器和紫外传感器;微波传感器包括辐射计、雷达等。目前,对溢油检测方面的研究主要集中在对遥感图像的处理上,Topouzelis等[1]对海上溢油SAR图像提取了5个几何特征,并对提取的特征运用RBF神经网络进行识别;陈海菊等[2]针对激光荧光遥感图像,以光谱形状作为识别的关键特征,利用支持向量机算法识别溢油,对不同油品的分类有较好的精度;郭越等[3]针对SAR图像,融合了灰度共生矩阵与Tamura特征,利用深度信念网络的分类方法,避免了对图像进行分割、降噪等预处理,并很好地解决了检测中小样本分类的问题。
在溢油检测方面,针对船载图像对海面进行检测的研究很少,Nasser[4]通过对船载SAR图像提取灰度共生矩阵的8个特征,并对这8维特征进行主成分分析,实时追踪船只附近的溢油区。Solano[5]通过安装在平台上的红外/雷达相机对水面进行监控,通过提取溢油区域周长及灰度共生矩阵等特征,对油区进行识别,并建立基于区域的数据库,持续对水面进行监测。通过在出检测船只以及出海渔船上安装检测相机,或是在沿岸安装检测相机,实时监控海面与河面的溢油情况,将溢油监测作为一个常态工作,对降低溢油事故带来的影响很是必要。这种实时密集监控会使用大量的检测设备,设备成本是必须要考虑的,红外相机价格低廉,适合大范围安装监控设备,对红外溢油图像进行检是非常值得研究的。
本文提出了一种基于超像素分割[6]以及纹理特征提取的红外图像溢油检测方法,首先对船载红外溢油图像进行过分割,从而得到基于超像素块的分割子区域,以每一个超级像素作为纹理基元,对该纹理基元的分割区域进行纹理特征提取,而后利用SVM分类器对提取出来的纹理特征进行识别分类,从而完成溢油检测的过程。
2 纹理特征提取
由超像素分割得到的每一个小区域,对邻域特征的表达非常适合。分割出的每一个小区域,相当于纹理的每一个基元,对每一个纹理基元提取特征来表达该区域的特性很是适用。
2.1 基于区域的亮度直方图的纹理描绘子
基于区域的亮度直方图的纹理描绘子是跟图像像素相对位置无关的特征信息,这种特征用于超像素块的特征提取很合适。本文选取均值、标准偏差、平滑度、三阶矩、一致性、熵这6个特征。其中,zi是表示灰度的一个随机变量,p(zi),i=0,1,2,…,L-1是表示相应灰度级的直方图,L是可能的灰度级数。
1)均值

反映的是基于区域的平均灰度的度量。
2)标准偏差
反映的是基于区域的平均对比度的度量。
3)平滑度

反映的是区域中亮度的相对平滑程度。对于亮度为恒定值的区域,平滑度R的值等于0,而对于亮度有较大偏移的区域,平滑度R的值等于1。
4)三阶矩

反映的是基于区域的直方图偏斜度。
5)一致性


反映的是区域亮度变化的随机性。
2.2 基于灰度共生矩阵的纹理特征
基于灰度共生矩阵的纹理特征[7~8]包含了与像素彼此之间的相对位置有关的信息,通过计算纹理基元中任意两个像素的灰度级关于不同方向( θ=0°,45°,90°,135°) 、不 同 间 隔 距 离(d=1,2,…,n)出现频率的统计,可以得到关于该区域的灰度共生矩阵。从每一个基于不同方向、不同间隔距离的灰度共生矩阵中,可以提取相关的纹理特征。本文从灰度共生矩阵提取的14个纹理特征中,选取对比度、相关性、能量、同质性这4个特征。其中,K 为定义的灰度级,p(i,j,d,θ) 表示灰度为 zi(1≤i≤K)和 zj(1≤j≤K)的像素对出现在方向为θ,间隔距离为d的灰度共生矩阵中的频率。
1)对比度

反映的是区域亮度的一致性。对于灰度值相等的区域,该度量的值为最大值。
6)熵
反映了一个像素点在整个图像上与其邻域范围的灰度对比度。当一副图像为恒定图像时,对比度的值为0。
2)相关性

其中
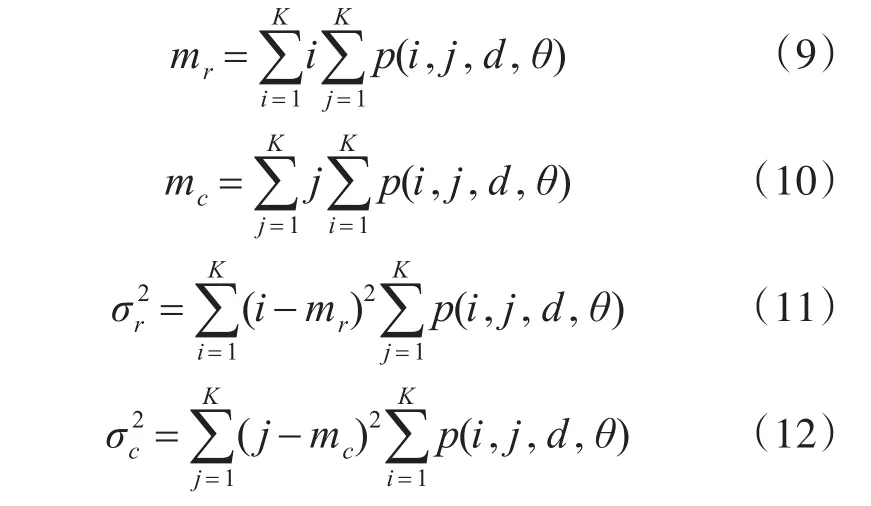
反映一个像素在整个图像上与其邻域相关程度的度量。当二者完美正相关时,相关性的值为1,完美负相关时,相关性的值为-1。
3)能量

反映了区域灰度分布的一致性。对于恒定图像,能量的值为1。
4)同质性

反映了灰度共生矩阵中元素对角线分布的空间紧密程度。
对于对比度、相关性、能量、同质性这4个特征,在确定间隔距离d时,可以分别计算出其在0°、45°、90°、135°这4个方向上的特征值,得到16维特征值,记为X7-22。如果要使灰度共生矩阵特征具有旋转不变性,可以选取对比度、相关性、能量、同质性这4个特征在0°、45°、90°、135°这4个方向上的最大值,得到4维特征值,记为 X23-26。为了使灰度共生矩阵具有旋转不变形,也可以对灰度共生矩阵在 0°、45°、90°、135°方向上结果进行融合,而后再对该灰度共生矩阵提取对比度、相关性、能量、同质性这4维特征,记为X27-30。
3 支持向量机
支持向量机(Support Vector Machine,SVM)发表于20世纪90年代,是一种基于统计学习理论的机器学习算法[9]。支持向量机是建立在VC维理论和结构风险最小化原理的基础上的,在有限的给定样本上,对经验风险最小化和置信风险选择一个折中的最优点,以获得具有较好泛化能力的分类器模型。本文使用LIBSVM[10]作为识别分类器。
4 实验与结果分析
4.1 方法
本文采用一种基于超像素分割以及纹理特征提取的红外图像溢油检测方法,首先针对红外溢油图像进行超像素分割,而后将每一个划分的超像素块作为纹理基元,通过对基于超像素块的纹理基元计算得到相关特征值,而后利用分类器进行模式识别,从而得到用于红外图像溢油检测的分类模型。

图1 算法流程图
4.2 结果分析
本文通过人工标定划分油膜超像素块以及海面超像素块,并选取其中较为纯净的油膜超像素块以及较为纯净的海面超像素块作为训练样本,其余标定的油膜超像素块以及海面超像素块作为测试样本。

表1 实验样本组成
本文对比了基于亮度直方图的纹理描绘子以及基于灰度共生矩阵的纹理特征的不同组合,结合SVM分类器构造的分类模型识别准确率。其中,将基于亮度直方图的纹理描绘子的6维特征记为X1-6,将基于灰度共生矩阵的对比度、相关性、能量、同质性分别在0°、45°、90°、135°这4个方向上的16维特征记为X7-22,将基于灰度共生矩阵的对比度、相关性、能量、同质性分别在0°、45°、90°、135°这4个方向上的最大值这4维特征记为X23-26,将融合了各方向的灰度共生矩阵的对比度、相关性、能量、同质性这4维特征记为X27-30。
由表2可以看出,在选取基于亮度直方图的纹理描绘子的6维特征X1-6以及于灰度共生矩阵的对比度、相关性、能量、同质性分别在0°、45°、90°、135°这4个方向上的16维特征 X7-22进行组合时,识别的准确率最高。

表2 比较不同特征组合的分类结果
由表2以及图2可看出,对于红外溢油图像,结合基于灰度共生矩阵的纹理特征以及基于亮度直方图的纹理描绘子进行识别,相较于单独使用基于灰度共生矩阵的纹理特征进行识别,其准确率有一定的提高。
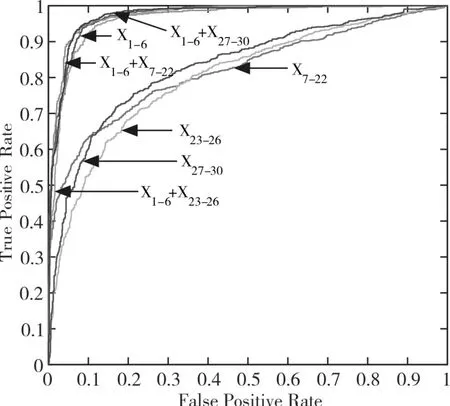
图2 不同特征组合的ROC曲线比较
图3为本文算法与OTSU算法针对红外溢油图像进行识别的结果比较,可以看出,相较于OTSU算法,本文首先通过超像素进行纹理基元划分,可以在红外溢油图像中较为完整地保存溢油区域的边缘信息,从而更有利于快速圈定溢油范围。
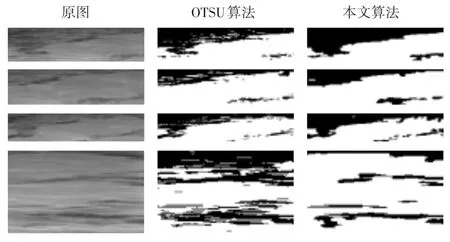
图3 本文算法与OTSU算法对比
5 结语
本文以基于超像素分割以及纹理特征提取为核心,提出了一种红外图像溢油检测的方法。基于超像素分割的纹理基元能较好地保持油区的边缘信息,而对超像素分割的纹理基元提取的纹理特征可以对油膜和海面进行区分。实验结果表明,本文方法能较好地保持油膜边界信息的完整性,并且通过对纹理特征的识别分类,区分油膜与海面,达到较好的溢油检测效果。
[1]Topouzelis K,Karathanassi V,Pavlakis P,et al.Oil spill detection using RBF neural networks and SAR data[C]//XXth ISPRS Congress.Istanbul,Turkey,2004.
[2]陈海菊,安居白,刘建鑫.基于SVM的激光诱导荧光遥感识别海面溢油[J].应用能源技术,2008(2):6-9.CHEN Haiju,AN Jubai,LIU Jianxin.The laser induced fluorescence remote sensing identify sea oil spills with SVM[J].Applied Energy Technology,2008(2):6-9.
[3]郭越,王晓峰,张恒振.基于人类感知的SAR图像海上溢油检测算法[J].武汉大学学报信息科学版,2016,41(3):395-401.GUO Yue,WANG Xiaofeng,ZHANG Hengzhen.Oil Spill Detection by SAR Images Based on Human Perception[J].Geomatics and Information Science of Wuhan Univer⁃sity,2016,41(3):395-401.
[4]Saleh N M.Automated oil spill detection with ship borne radar[D].International Institute for Geo-informational Science and Earth Observation.ITC,The Netherland,2004.
[5]Solano F J V,Espósito C I D,García C M,et al.Infrared image based early detection of oil spills in water:WO,WO2014006234 A8[P].2014.
[6]Achanta R,Shaji A,Smith K,et al.SLIC superpixels compared to state-of-the-art superpixel methods.[J].Pat⁃tern Analysis&Machine Intelligence IEEE Transactions on,2012,34(11):2274-2282.
[7]Haralick R M.Statistical and structural approaches to tex⁃ture[J].Proceedings of the IEEE,1979,67(5):786-804.
[8]Haralick R M,Shanmugam K,Dinstein I.Textural Fea⁃tures for Image Classification[J].Systems Man&Cyber⁃netics IEEE Transactions on,1973,3(6):610-621.
[9]Vapnik V N.An overview of statistical learning theory.[J].IEEE Transactions on Neural Networks,1999,10(10):988-999.
[10]Chang C C,Lin C J.LIBSVM:A library for support vec⁃tor machines[J].Acm Transactions on Intelligent Sys⁃tems&Technology,2011,2(3):27.