基于海天线引导与卷积神经网络的舰船目标检测∗
2018-04-26梅升阳田金文
梅升阳 田金文
(华中科技大学自动化学院多谱信息处理技术国家级重点实验室 武汉 430074)
1 引言
红外舰船目标检测一直是国内外关注的热点问题,因为它是红外制导武器在海面背景下识别、跟踪、可靠捕获目标的重要基础和前提。实际海面存在大量海杂波、海浪、太阳光反射等诸多干扰。为了实现海天背景下舰船目标的可靠检测,众多学者提出了许多方法。在空域,有基于多尺度局部方差的方法[1],基于多尺度局部梯度的方法[2],基于多尺度分形与均值漂移的方法[3],基于数学形态学的方法,基于梯度统计特性的方法,以及基于小波包和高阶统计量的方法等等。在频域,有基于频谱残留变换的方法[4]等。这些方法在简单的背景干扰下都能取得较好的检测效果。
传统的检测模型通常采用人工特征提取方法获得目标的特征描述,然后进行目标的分割提取识别等。这种人工特征提取方法相对复杂,对特征提取的方式要求较高。而且人工特征也没有比较好的适用性,不同的场景用不同的特征会有不同的效果。其次,很多特征提取方式需要小尺度、小角度的变换等等,在现实应用中难以满足。这些年来,随着神经网络和深度学习技术的不断进步与发展,其在目标检测、识别、分类等领域越来越显示其强大之处。卷积神经网络(Convolution neural net⁃works,CNNs)是为图像处理领域特别设计的深度学习网络架构,它将多层人工神经网络与卷积运算相结合,通过卷积运算让计算机自动从图像中提取目标特征,这样获得的特征更自然,通用性更好。同时,它对一定程度的扭曲形变有良好的鲁棒性。另外,它根据图像特点,使用局部图像来做卷积,这种稀疏连接和权重共享,极大减少了神经网络模型的参数个数[5]。
然而,卷积神经网络需要对整个目标进行处理,对于一些复杂目标,模型需要大量的中间节点,计算量大。为了减少目标检测的计算量,这里引入了海天线检测方法。根据海天线检测结果,得到目标检测的ROI区域。在ROI区域中进行卷积神经网络的目标检测,可以大大提高目标检测的效率,提高检测方法的可用性。许多学者对海天线提取的研究取得了很好的成果。张峰等采用行映射直方图的方法确定海天线区域。这种方法在简单的海天背景上取得良好效果,但是用于图像二值化的门限不好确定。Mohanty[6]则通过行平均,寻找列方向梯度最大值位置作为海天线位置。但是这种方法对海杂波十分敏感。裴继红、刘松涛[7]、杨磊[8]、吕俊伟[9]、裴立力[10]、魏颖[11]等提出了相应的海天线检测方法,这些方法都有较好的效果,但是在复杂背景下又会面临这样那样的问题。本文将提出基于特性融合的海天线检测方法,以取得较好的检测效果和鲁棒性。
2 海天线检测
经过大量实验研究发现,海天线具有分界特性与直线特性。海天线上部区域与下部区域具有不同的统计特性,如方差、熵等的差别。很多检测方法也是基于这个特性提出的,如基于局部方差、局部梯度的方法等。另一个特性是直线特性,也就是海天线接近一条直线,利用这个特性,可以用Hough变换的方法来检测海天线。但是在复杂图像背景情形下,海天线的分界特性会受到干扰。这样单一的基于分界特性的算法难以准确检测海天线,需要结合直线特性进行检测。将亮度、纹理、直线特性等进行融合以实现更好的海天线检测是本节的主要内容。
2.1 行分割熵差
考虑一个大小M×N的图像f(x,y),用Gabor滤波器g(u,v)滤波后的图像为t(x,y):

以第i行为界,分割t为上下两部分:
分别求取t1的熵 H1(i)与t2的熵H2(i),则行分割熵差为

2.2 行对比度
计算行对比度时先把图像按照步长Step分割成多个条带。其中,第1条带由第1行至第Step行构成,第2条带由第Step+1行至第2Step行构成,第k条带由第(k-1)Step+1至第kStep行构成。设第k条带第1行的行号为i:
第k条带像素强度和为Sk:

2.3 行直线拟合系数
根据海天线的直线特性,海天线所在的点应当可以回归成一条直线。用条带的列重心来代表海天线上的点,根据这些点的直线回归相关系数可以得知拟合的好坏,也就值直线性的强弱。
对于第m条带,设其第一行的行号为i,条带步长为Step,则第n列的重心为
将 第m条 带 的 重 心G1(x1,y1),G2(x2,y2),…,Gn((xn,yn)),…,GN(xN,yN)回归成一条直线,则该回归的相关系数,即行直线拟合系数为
2.4 多特性融合的检测方法
为取得更好的融合效果,先用Gabor滤波器对原红外图像进行滤波,得到纹理图像。在纹理图像基础上,分别计算分割熵差、行对比度、直线拟合系数等,最后进行乘积融合。过程如图1。
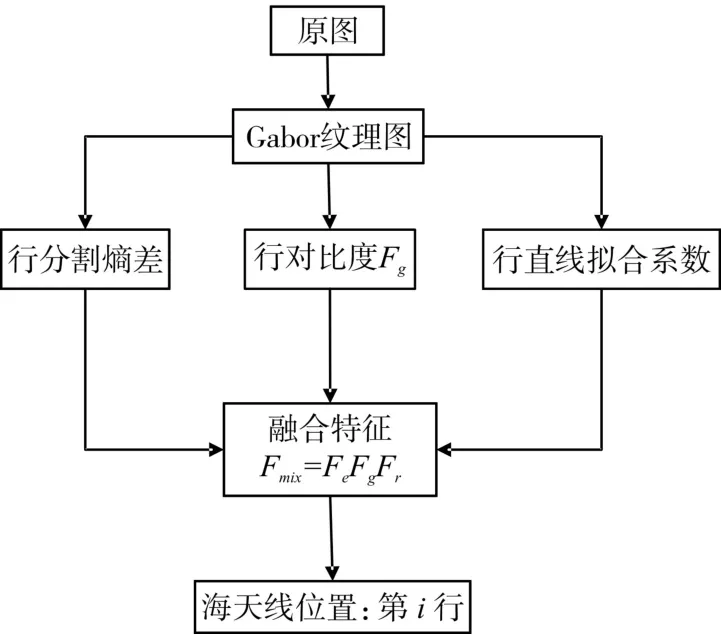
图1 多特性融合流程
用公式表示就是
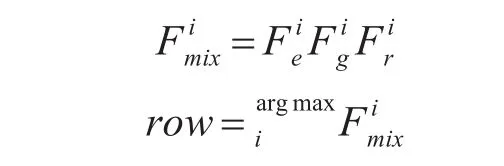
其中,i表示第i行。
这样就得到了海天线的位置,当然这里没有考虑海天线的倾斜问题。对于确定ROI区域来说,这样的精确度足够了。
3 基于卷积神经网络的检测方法
3.1 CNN网络检测模型
本文提出的网络检测模型由多个卷积层与多个池化层构成。分别是输入层、卷积层(Convolu⁃tional Layer)、池化层(Pooling Layer)、卷积层、池化层。卷积层通过将输入层或者前一层的局部区域神经元的输出与卷积核的权重做点积以提取目标特征。卷积层的步长都为1,卷积核大小都为5。所得特征经过激活函数作用,成为下一层的输入。激活函数使用sigmoid函数:
池化层对上一层的输入做空间上的降采样,以减少整个网络的参数个数,既可以降低计算量,提高检测效率,又可以避免过拟合问题。这里池化层降采样比率设为2,也就是池化后的层宽高皆为输入的一半。整个网络结构如图2所示。
最终网络输出检索区域属于舰船目标的概率P。
3.2 ROI区域提取
为了减少卷积神经网络检测时的计算量,可以将检测区域缩小到海天线上下一定区域范围内。设上下宽度取为δ,则ROI区域为
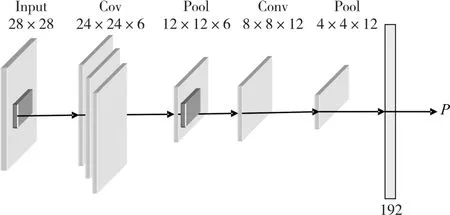
图2 本文卷积神经网络框架结构

一般舰船分布区域不会太宽,δ取15~30左右即可。
3.3 目标检测流程
整个检测过程是在ROI区域内,利用多个尺度的搜索窗口寻找舰船目标。寻找舰船目标的过程中,利用训练好的CNN网络求取搜索窗口区域属于目标舰船的概率。然后进行后处理得到目标检测结果。整个过程如图3所示。

图3 本文目标检测流程图
4 实验结果分析与讨论
4.1 海天线检测实验
将直线拟合方法、Hough变换法检测海天线结果与本文提出的方法比较。实验图像都是320×256的红外图像。直线拟合方法中分区宽度K=4,平均值滤波窗口大小为3×3。本文方法中计算行对比度的步长Step=4。
从第一第二幅图像可以看到,烟幕弹情形下,直线拟合方法、Hough变换法与本文方法检测海天线效果接近,直线拟合方法对于有一定倾斜角度的海天线有优势。
从第三幅图像可以看到,云雾干扰情况下,直线拟合方法无法准确检测海天线,Hough变换法与本文方法可以较为准确检测海天线。
从第四幅图像可以看到,较强海杂波情形下,直线拟合方法与Hough变换法也无法准确检测海天线,而本文方法可以较为准确检测海天线。
综上所述,本文方法在各种海天线干扰下都有较好的检测效果,尤其是云雾干扰与海杂波干扰时有较大优势,但是对于倾斜的海天线稍显不足。
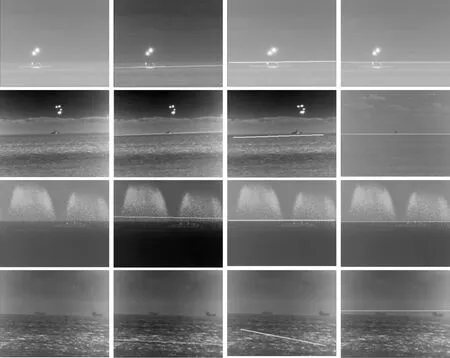
图4 本文方法与典型的海天线检测方法对比
4.2 CNN网络训练
本文对卷积神经网络的训练使用红外舰船图像数据。使用人工标记的方法在舰船目标周围选取正样本,在背景区域选取负样本。在多达220张连续的舰船序列图像中,用其中200张图像标记出400个正样本与600个负样本。接着对标记出的样本进行左右对称处理,以提高训练模型对舰船方向的适应性。然后对总计2000张样本进行归一化处理,尺度为28×28。将这些样本放入本文的CNN网络进行训练。

图5 典型的红外图像数据

图6 经过归一化的正样本,样本中含有舰船目标

图7 经过归一化的负样本,样本中为背景或者干扰
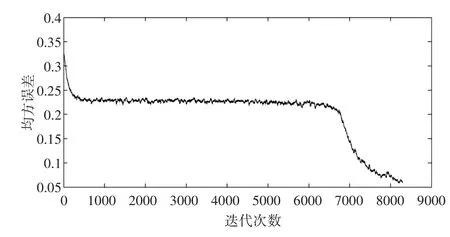
图8 经过多次迭代,训练样本的均方误差越来越小
4.3 基于CNN的舰船目标检测实验
提取ROI区域过程中,海天线上下宽度δ设为13。实际检测过程中,这个参数要根据舰船具体大小来设定。如果舰船大小不同,或者舰船可能偏离海天线较远,就需要设定较大的δ值,并使用多尺度窗口搜索技术来检测目标。由于篇幅有限,这里就不对此参数做过多讨论。
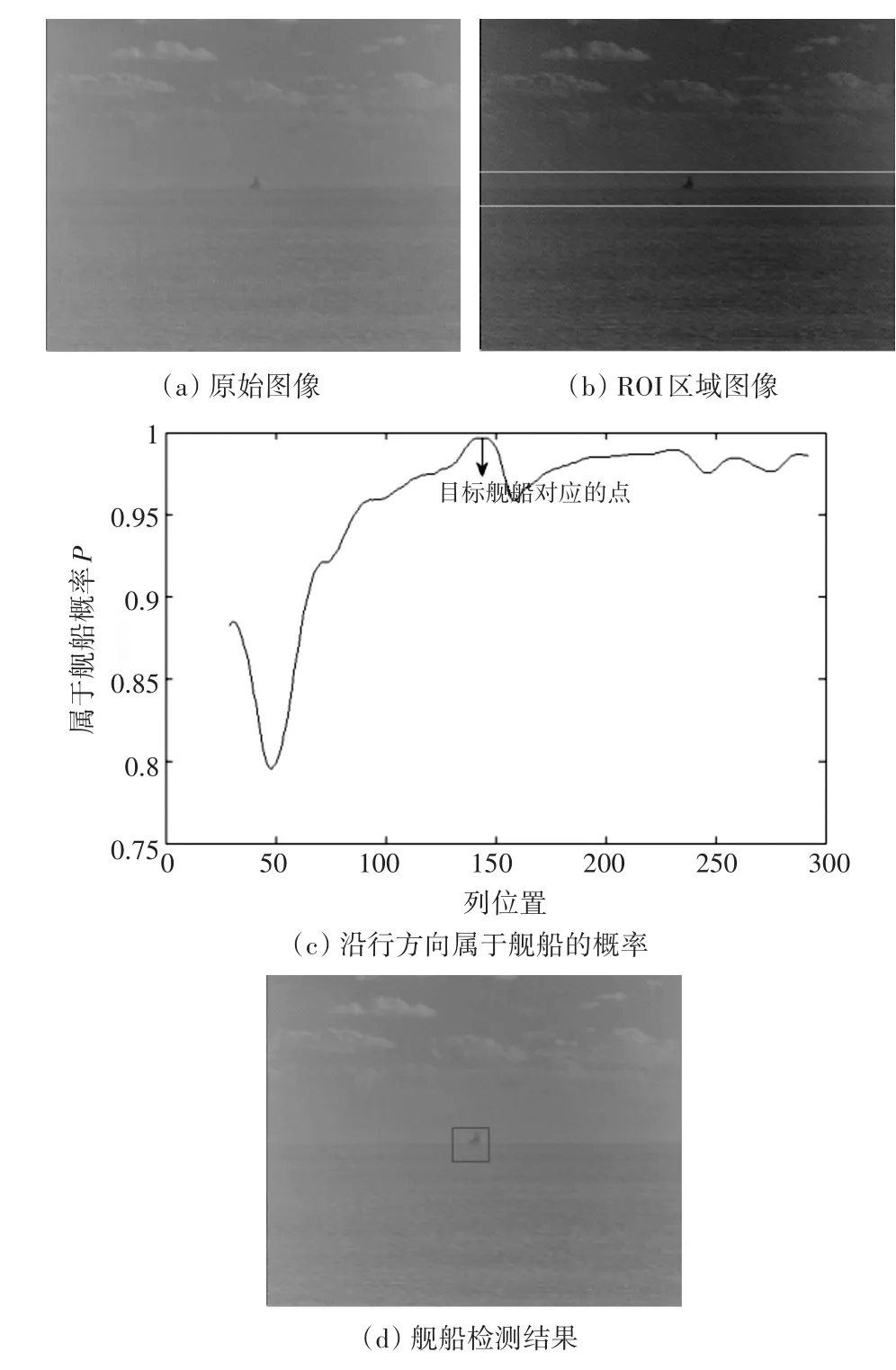
图9 基于CNW的舰船目标检测实验
得到ROI区域后,在ROI行方向上采集滑动窗口,放入训练好的卷积神经网络模型计算窗口属于目标舰船的概率,从而得到概率曲线。由于图像上只有一个舰船,获取最大概率对应的列位置,即可得到目标舰船的位置。实际检测过程中,可能有多个舰船目标,就需要考虑恒虚警处理以及目标合并的问题。这里就不展开了。
从上面的研究可以看到,本文基于海天线引导与卷积神经网络的舰船目标检测方法确实可以准确检测舰船位置。
5 结语
结合海天线的分界特性与直线特性,本文提出了海天线的多特性融合的检测方法。相比于传统的直线拟合方法与Hough变换方法,本文方法在复杂背景下有较大优势。在海天线检测基础上,本文进一步在图像上提取ROI区域,用于CNN网络检测舰船目标。通过自主设计的网络模型,在人工标记样本训练的基础上,取得较好的检测效果。今后将进一步研究多尺度的检测方法以改进算法的整体性能。
[1]邹常文,冯力天,刘先志,等.基于多尺度局部方差的海面红外舰船检测[J].激光与红外,2011,41(6):697-699.ZOU Changwen,FENG Litian,LIU Xianzhi,et al.Infrared Warship Target Detection based on Multi-scale Variance[J].Laser&Infrared,2011,41(6):697-699.
[2]邢莎,吉林,雍杨,等.基于多尺度局部边缘梯度的红外舰船目标检测[J].兵工自动化,2014(5):61-64.XING Sha,JI Lin,YONG Yang,et al.Infrared Warship Target Detection based on Multi-Scale Edge Gradient[J].Ordnance Industry Automation,2014(5):61-64.
[3]邹常文,刘先志,戴军,等.基于多尺度分形与均值漂移的红外海面舰船目标分割[J].激光与红外,2010,40(9):1023-1026.ZOU Changwen,LIU Xianzhi,DAI Jun,et al.Infrared Ship Object Segment based on MFFK and MeanShift filter⁃ing[J].Laser&Infrared,2010,40(9):1023-1026.
[4]张志龙,杨卫平,张焱,等.基于频谱残留变换的红外遥感图像舰船目标检测方法[J].电子与信息学报,2015,37(9):2144-2150.ZHANG Zhilong,YANG Weiping,ZHAN Yan,et al.Ship Detection in Infrared Remote Sensing Images Based on Spectral Residual Transform[J].Journal of Electronics&Information Technology,2015,37(9):2144-2150.
[5]卢宏涛,张秦川.深度卷积神经网络在计算机视觉中的应用研究综述[J].数据采集与处理,2016,31(1):1-17.LU Hongtao,ZHANG Qinchuan.Applications of Deep Con⁃volutional Neural Network in Computer Vision[J].Journal of Data Acquisition&Processing,2016,31(1):1-17.
[6]Mohanty,N.C.Image Enhancement and Recognition of Moving Ship in Cluttered Background[J].Pattern Analy⁃sis and Machine Intelligence,IEEE Transactions on,1981,3(5):606-610.
[7]刘松涛,沈同圣,韩艳丽,等.舰船目标海天线提取方法研究[J].海军航空工程学院学报,2002,17(6):51-53.LIU Songtao,SHEN Tongshen,HAN Yanli,et al.Re⁃search on Locating the Sea-sky Boundary of Ship Target[J].Journal of Naval Aeronautical Engineering Institute,2002,17(6):51-53.
[8]Yang,L.,et al.Variance WIE based Infrared Images Pro⁃cessing[J].Electronics Letters,2006,42(15):857-859.
[9]吕俊伟,王成刚,周晓东,等.基于分形特征和Hough变换的海天线检测算法[J].海军航空工程学院学报,2006,21(5):545-548.LV Junwei,WANG Chenggang,ZHOU Xiaodong,et al.A Sea-sky-line Detection Algorithm based on Fractal Fea⁃ture and Hough Transform[J].Journal of Naval Aeronauti⁃cal Engineering Insititute,2006,21(5):545-548.
[10]裴立力,史泽林,罗海波.一种基于小波多尺度分析的水天线检测方法[J].沈阳工业大学学报,2003,25(2):125-128.PEI Lili,SHI Zelin,LUO Haibo.Detection of Sea-level based on Wavelet Multi-scale Analysis[J].Journal of Shenyang University of Technology,2003,25(2):125-128.
[11]Wei,Y.Z.Shi,and H.Yu.Wavelet Analysis based Detec⁃tion Algorithm for Infrared Image Small Target in Back⁃ground of Sea and Sky[C]//Image and Signal Processing and Analysis,2003.ISPA 2003.Proceedings of the 3rd International Symposium on.2003(1):23-28.