论南京以下深水航道进江海轮的航行安全
2018-04-20
(江苏海事职业技术学院航海技术学院,江苏南京 211170)
1 问题的提出
2016年以来,随着南京以下长江深水航道的开通,5万吨级的大型船舶可以全天候地进抵南京长江大桥下,这固然会对江苏的深度改革开放、长江经济带的建设带来巨大的经济效应和社会效益。但是就通航安全而言,却带来了一些问题,进江的深吃水海轮船底的富裕水深不足,出现的浅水效应明显,容易擦浅、搁浅,大型船舶在沿岸航行时将会出现明显的岸壁效应,容易造成航向和船位失控。由深吃水海轮引起的巨大的水动力会影响附近船舶的航行安全,即给他船造成明显的船间效应,容易造成船舶间的碰撞。因此,大型船舶在深水航道中航行存在着较大的通航风险,大型船舶在深水航道中通航安全保障是一个极具研究价值的课题。
2 南京以下长江深水航道通航条件分析
2.1 航道尺度分析
南京以下长江深水航道,上起南京长江大桥,下至苏沪交界处附近的浏河口,全程约280公里。在南京以下长江航段,设置深水航道,在深水航道内设置上、下行通航分道和分隔带,分别占航道宽度的五分之二、五分之一。在不具备设置分隔带条件的深水航道内,设置分隔线。深水航道一般情况下宽度达500米,不足500米的以实际航宽为准但不得低于200米。另一方面,在深水航道外设置一部分推荐航路(沿岸通航带)。到2015年底,深水航道二期工程结束,深水航道最小水深已达12.5米,推荐航路最小水深已达4.5米。
2.2 大型船舶航路分析
依据《长江江苏段定线制规定(2014)》,“大船”指长度达到80米的船舶,而文中的“大型船舶”特指5万载重吨以上的任何类型的船舶,属于“大船”的范畴。
深水航道主要供大船使用,大型船舶一般情况下走深水航道,在深水航道内,所有船舶一律按各自靠右的航行原则沿规定的通航分道行驶,并尽可能远离分隔带或分隔线。[1]
大型船舶因追越需要可以短时间占用分隔带水域。大型船舶在经过通航条件受到限制的水域前,或自身操纵能力受到限制时,应向主管机关设置的船舶交通管理中心报告,在无碍他船行驶且采取必要的安全措施后,可以行驶在左侧分道,但驶过后应及时恢复到规定的右侧分道内行驶。大型船舶如果航速低于规定的通航分道最低航速,应进入推荐航路航行。小船(长度不足80米)一般情况下必须按规定的推荐航路行驶,如果没有推荐航路可走,应走通航分道,但应尽可能沿分道右边缘行驶。
2.3 大型船舶的限速规定分析
在不危及他船或设施安全的情况下,船舶在通航分道内正常航行时,最高航速28公里/小时;最低航速7.5公里/小时。
3 大型船舶操纵性能分析
大型船舶单位排水量所分摊的主机功率要比其他船小得多,因而停船性能差,惯性冲力大。造成其制动、控制船舶的能力远逊于普通万吨轮。其加速、减速、停船、倒船等需时较长。大型船舶在常速中停车,降速到仅能维持舵效的速度时,停船距离约为船长的23倍,大型船舶在常速航进中倒车,停船距离约为船长的12倍。
大型船舶船底富裕水深小,相当于航行在浅水区,与深区相比,舵力下降得多、应舵迟钝、舵效差,尤其是低速航行时,很难维持舵效。由于惯性大,反应迟钝,所以转向、避让、把定时需早用舵,用大舵角,同时与普通万吨轮相比还需留有更大的回旋余地。
大型船舶由于长宽比小、方型系数大(Cb>0.8),因而航向稳定性差。风流作用面积大,风流中的保向能力明显下降,航迹略成S型轨迹,在会船时不易稳住航向,因此必须与他船保持更大的距离。
大型船舶在受限水域中航行,容易出现的通航风险:(1)由于船底的富裕水深不足,出现的浅水效应明显,容易擦浅、搁浅;(2)大型船舶在沿岸航行时将会出现明显的岸壁效应,船头易被推向江心、船身易向岸边吸拢,造成航向和船位的失控;(3)大型船舶会引起的巨大的水动力,从而给他船造成明显的船间效应;排斥、吸引他船,致使他船偏转,从而造成碰撞。
4 南京以下长江深水航道大型船舶防范擦底事故的操控举措
以吃水10米的大型船舶为例,南京以下长江长江深水航道最小水深为12.5米,那么大型船舶的实际水深与吃水之比H/d为1.25,由于H/d<2的航段就属于对船舶的自控能力造成明显影响的浅区,因此本航段将对大型船舶造成明显的浅水效应。[2]
由于大型船舶的船底过水断面小,引起船底相对水流速度增大,水压力降低船体下沉,更易擦浅。相对水深H/d越小、船速越大、方型系数越大,则下沉量越大。理论研究和实船试验表明,内河航船吃水增量可用下列公式估算:
Δ (1)
然而,式1以L/B近似地代表船型,并忽略了水道宽度的影响,仅是个粗略公式,不能直接用于本航段。
南京以下航段船舶吃水增量公式的推导:参照美国《船舶操纵》文献中的大型船舶Δd理论公式和南京长江油运公司Δd经验公式,结合南京以下长江的多年数据统计,可得出Δd与Cb成线性关系的的结论,进而设定南京以下长江航船吃水增量公式:
Δd=kCbV2/200
(2)
系数k由H/d和B0/B(相对水道宽度)决定(V-公里/小时,Δd-米)。
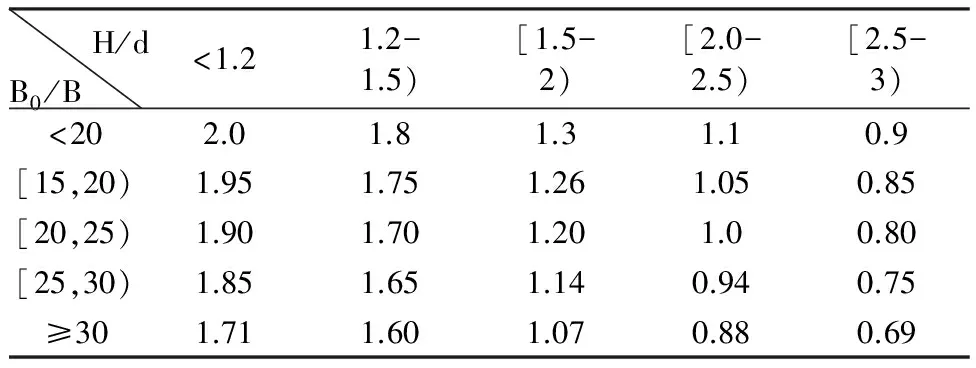
表2 船舶吃水增量系数k表(以B0/B、H/d为引数查取)
例如:某船船宽B=40米、吃水d=10米、方型系数大Cb=0 .82、H/d=1.25、航经水道宽度B0620米,B0/B=15.5,查表得k=1.8。
大型船舶若行驶船速V=20公里/小时,算出Δd=2.96米,由于富裕水深才2.5米,船底必将坐底;若行驶船速V=公10里/小时,算出Δd=0.74米,则船底不会坐底。
因此,大型船舶必须根据当时的富裕水深,决定采取的最高船速。尽量慢速航行以减小下沉量。航行在浅水水域中,驾驶员要做到及时的调整吃水差,尽量做到平吃水。尽量占据较深水域,如暂时使用分隔带。
5 南京以下长江深水航道大型船舶防范失控事故的操控举措
5.1 大型船舶的岸壁效应定性分析
岸壁效应是指船舶接近岸壁行驶时,岸推船首、岸吸船身,造成船舶偏向和偏位的现象。船距岸越近、船速越高、方型系数越大、相对水深越浅、相对水道宽度越窄,岸壁效应就越明显。在上述诸影响因素中,方型系数、相对水深和相对水道宽度属于客观因素,驾驶员无法改变,为预防岸壁效应,在近岸航行时驾驶员所能做的只能是“保持岸距、慢速行驶”。
大型船舶沿岸航行时,由于方型系数大、相对水深浅、相对水道宽度窄的原因,将会受到明显的岸壁效应,一旦操纵失误,很容易导致船舶失控。
5.2 大型船舶的岸壁效应定量分析
所采集的炜伦1号(方型系数Cb0=0.71)在南京以下深水航道沿岸航行实测数据如表3。

表3 岸壁效应明显时的船岸距DCA与船速V关系表
经数据拟合得出Cb0=0.71时的DCA与V关系的数学模型DCA≈1.8V1.5,进而可推出任何船型的船舶明显出现岸壁效应时的船岸距公式DCA≈1.8mV1.5(m为方型系数调节值):
m=Cb/Cb0
(3)
例如,炜伦10号(Cb=0.8),则m=0.8/0.71,DCA≈1.8V1.5×0.8/0.71=2.0V1.5。然后根据本船的速度大小,确定应保持的船岸距最小值,即确定离岸的船位。
分析表3可以得出如下结论:船速越大、方型系数越大,保持的岸距应越大。大型船舶属于方型系数大的船舶,为防岸壁效应,应控制好速度。
5.3 大型船舶沿岸航行时防范失控事故的操控举措
压舵是抵抗岸壁效应进行保向保位的最有效方式。贴近岸壁航行时,通常无法回避岸壁效应,可采取压舵保向的措施来弥补,向岸壁方向压一适当的内舵,使F岸吸力与舵力在重心处的横向反移力P3Y相等,使舵力矩MP与M岸推相等,从而实现“船头不外偏、船身不内吸、航迹平行于岸线”的目标。实践证明:当船压某一舵角正好能保向时,往往也是“舵力矩=岸推力矩”之时。
如果压舵角δ压>15°,说明船岸距过小。所以航线岸距的最小值确定的依据为保向岸壁效应的作用不致使δ压>15°。
6 南京以下长江深水航道大型船舶防范船间碰撞的操控举措
6.1 大型船舶的船间效应定性分析
船间效应主要是指当两船间距较小时出现的吸引、排斥和转头现象。船间距DCC越小、船速V越大、船型越肥大、水域越浅窄,船间效应就越明显;两船相持时间越长、碰撞危险持续的时间就越长,因此两船同向行驶的危险度要大于对驶的危险度;不同大小的两船互相接近时小船所受影响大。在上述诸影响因素中,船舶大小及形状、水道条件属于客观因素,驾驶员无法改变,为预防船间效应,驾驶员所能做的是“保持船间距、慢速行驶、缩短持续时间”。
6.2 大型船舶的船间效应定量分析
当(船间距)DCC﹤L1+L2(两船船长之和)时船间效应出现,当DCC﹤1/2(L1+L2)时船间效应明显从而出现碰撞危险。以长度均为150 m的两大型船舶会遇为例,如要完全避免船间效应,那么船间距至少为300 m,在南京以下长江深水航道总宽才500米,航道宽度达不到这一要求,因此两大型船舶会遇只能做到避免显著的船间效应,即满足DCC≥1/2(L1+L2)的条件,保持间距150米。[4]
根据船速确定最小船间距DCC:运用控制变量法,当影响船间效应的其它因素一定时,分析DCC与船速V的关系。炜伦10号与菱洲轮相遇,出现显著船间效应时的船间距DCC与速度V的关系如表4。

表4 出现船间效应时的船间距DCC与速度V的关系表
运用Excel软件进行数据拟合,得出DCC与V关系的数学模型:
DCC≈0.3V2+1.2V
(4)
从式4中可看出:DCC与V2近似地成正比。
根据方型系数确定最小船间距DCC:现给定船速15 km/h,其它条件同上,当影响船间效应的其它因素一定时,仍用控制变量法量化分析DCC与船型Cb的关系。实船试验得出如下数据:

表5 出现船间效应时的船间距DCC与船型Cb关系表
经数据拟合,得出DCC与Cb关系的数学模型:
DCC≈95Cb+25
(5)
从式5可看出:(1)在船速不变的前提下,Cb每增加0.1,DCC应增加10 m,所以瘦长型船应比粗短型船保持更大的船间距;(2)DCC与Cb近似地成正比。[5]
6.3 大型船舶沿岸航行时防范船间碰撞的操控举措
船间距至少保持平均船长的1倍,采用最小速度7.5公里/小时,一旦出现船间效应,立即主机突进操舵抑制,抑制效果显现后降下车速、回舵;尽量保持在较深水域会遇,必要时临时占用分隔带或左侧分道,会船结束后尽快回到原航路上去。
7 结 语
虽然5万吨级的大型船舶现在可以全天候进抵南京长江大桥,但是由于大型船舶的船底富裕水深较小、方型系数较大,与普通万吨级船舶相比,将会表现出更为明显的浅水效应、岸壁效应、船间效应,面临着更大的擦底、碰撞和失控的通航风险。本文基于对南京以下长江深水航道的通航条件、大型船舶的操纵性能的分析,建立了防范通航风险的数学模型,运用数学模型提出了化解通航风险的船舶操控技术手段,包括船速的控制、合适船间距的保持、合适船岸距的保持。
1徐言民.12.5米深水航道测量船匹配[J]. 武汉理工大学学报,2015.
2王炜,王华燕.11.5米超吃水船舶进出张家港港安全通航方案研究[J].中国海事,2013.
3黄言平,胡晓东,王金林.大型船舶进出福姜沙南水道操纵注意事项[J].航海技术,2012.
4杨帆.船舶安全航数的定量模糊研究[J].武汉理工大学学报,2013.
5胡定军.12.5米深水航道上延到南京存在的问题和对策[J].中国航运,2011.
