基于改进HOG特征提取的车型识别算法
2018-04-19耿庆田赵浩宇于繁华王宇婷赵宏伟
耿庆田,赵浩宇,于繁华,王宇婷,赵宏伟*
(1.长春师范大学 计算机科学与技术学院,吉林 长春 130032;2.吉林大学 计算机科学与技术学院,吉林 长春 130012;3.吉林大学 学报编辑部,吉林 长春 130012)
1 引 言
车型识别是对车辆图像预处理后的部分关键区域进行特征提取和特征匹配,从而判断出该车的品牌并结合车牌及车标等识别技术,进一步协助验证该车的身份是否真实,是否存在套牌以及假车牌等违法情况,对于打击上述犯罪活动具有积极的意义。
特征提取作为车型识别重点研究方法,很多学者对此进行了深入的研究,并形成了多种理论算法。目前基于特征提取的汽车车型识别方法有:Sun Z等提出使用支持向量机作为分类器对Haar小波特征与Gabor特征相结合后分类学习实现车辆识别[1-2];吕恒利提出基于Harris角点和SIFT特征的车辆识别方法[3-5];华莉琴提出采用改进SIFT特征提取及多视角的车型识别算法[6-9];李文勇给出了基于Bayes理论的感应曲线自适应特征提取的车型识别方法[10]。这些方法由于特征提取过程复杂,计算量大,因此识别时间较长,不利于实际应用。
本文提出基于方向可控滤波器的改进HOG特征提取算法,对车辆图像特征进行提取同时采用主成分分析法(PCA)约减特征向量维数,降低计算的复杂程度,利用支持向量机学习方法实现车型的识别,提高了车型图像的识别正确率与速度。仿真实验结果表明:该方法对车辆轮廓外型识别有较好实时性和较高的精确度。
2 基于方向可控的改进HOG算法
2.1 梯度方向直方图算法
梯度方向直方图(Histogram of Oriented Gradient,HOG)[11]算法的思想是通过边缘方向的分布来表示图像目标的外形轮廓。具体做法是将被识别图像分成若干个大小固定的区域,通过获得该区域图像像素梯度并进行特征计算来累加梯度特征,从而获得一定维数的梯度方向直方图,如图1所示,具体由以下几步完成[12]:

图1 HOG特征提取过程 Fig.1 HOG feature extraction process
(1)图像区域分层划分
将图像划为两层,第一层互相连通Cell单元组成,几个Cell构成一个Block区块,各Block可以重叠。
(2)梯度值计算
通过计算像素点(x,y)的坐标方向的梯度来获取该点的梯度幅值和梯度方向。具体计算公式如式(1)、(2)、(3)所示:
(1)
式中,Gx(x,y)、Gy(x,y)、H(x,y)分别表示像素点在二维平面垂直坐标系中x轴和y轴方向梯度及像素值。该像素点处的梯度幅值与梯度方向的计算公式为:
(2)

(3)
(3)构建梯度直方图
将Cell的梯度方向180度等分成n个被称为Bin的方向块,累加每一个Cell的n维梯度幅度。
(4)块内归一化
将多个Cell单元组合为Block块,进行对比度归一。
(5)收集HOG特征
收集检测窗口中所有重叠的Block块的HOG特征。
2.2 方向可控滤波器算法
由上述HOG特征提取过程可以看出,其算法只能计算出像素点不够全面的单一梯度方向信息,具有一定的缺陷,不能完全描述车型图像的方向特征。因此,本文采用能够获取多方向信息的方向可控滤波器算法来弥补HOG算法的不足,使像素的单一方向信息扩展为N多个方向信息。
为了计算出像素点多个方向信息及方向幅值,Bill Freeman在1991年提出方向可控滤波器(Steerable Filter)[13]。该算法无论是边缘检测的效果,还是实现的难易程度都是较好的。其主要思想是通过在不同方向上产生模板去卷积图像,从而得到图像的边缘。卷积过程通过加权运算,对于有效像素增加权重,对于无效像素减少权重。一般定义分布在离散域的函数f与g二者的卷积如式(4):

(4)
方向可控滤波器的一般形式如式(5):
(5)
式中,n表示基滤波器的数量;Gi表示第i个基滤波器;ki(α)表示与方向度数α相关的滤波器的系数;Gα表示α方向的滤波器。
本文获取多方向滤波器的方法是通过对一组基滤波器的线性组合来实现,对二维高斯函数求导来完成,计算公式如式(6):
G(x,y)=k(α)exp[-(x2+y2)] .
(6)
具体计算过程如式(7):
(7)
相应系数如式(8):
(8)


(9)
式中,α表示方向可控滤波器的方向输入角度。
2.3 改进的HOG特征提取方法
在对车型的识别过程中,最重要的是能有效的提取目标图像中车辆轮廓的边界特征。由于传统的HOG方法获得的梯度方向信息对于提取边界特征相对较弱,本文将方向可控滤波器算法与传统HOG算法相结合,提出基于方向可控滤波器改进HOG特征的HOS(Histograms of Oriented Steerable Filter)算法。该算法先用方向可控滤波器算法计算出方向值最高的方向数量及幅值信息,再使用HOG算法获得统计方向直方图特征。算法流程如图2所示,具体计算如下:
(1)设P(x,y)为灰度图像的像素点,构造P像素点相互垂直的两个方向的方向可控滤波器(滤波器的方向分别取值为α与β,且α+β=π/2),分别记做Fα与Fβ。则P点在α与β方向的梯度值Gα(x,y)与Gβ(x,y):
(10)
其中,I表示灰度图像。
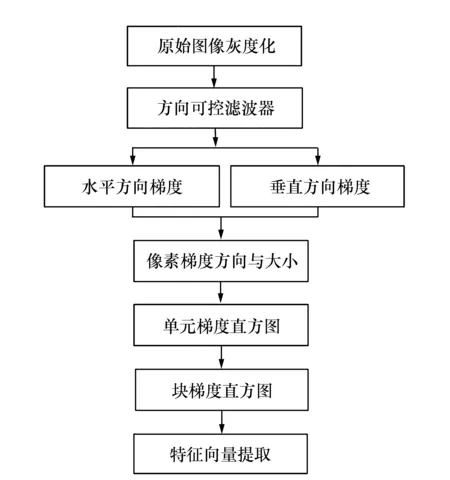
图2 方向可控改进的HOG方法流程图 Fig.2 Flow chart of improved HOG method with direction controlled
(2)计算出p像素点的边界方向G(x,y)和幅值θ(x,y):
|Gα(x,y)|+|Gβ(x,y)| ,
(11)

(12)
(3)同样将目标图像分为Cell单元并将毗邻的Cell组成有重叠边缘信息的Block块,再按边缘信息的梯度方向划分区间Bin,并将Cell像素点的梯度幅值叠加到Bin中,得到Cell的梯度方向直方图,最后对统计出Block的直方图特征作归一化处理,即对于向量ν做如下处理:
(13)
(4)最后将全部Block的HOG特征聚合为目标图像的HOG特征向量,向量的维度用D来表示,计算公式如式(14)所示,
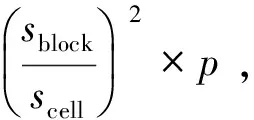
(14)
式中,lwidth、lheight分别表示目标图像的宽度与高度;sblock、scell分别表示Block块和Cell单元的大小;lstep表示Block移动的步长;p表示Cell梯度方向的数量。
3 特征向量降维与SVM模型训练
3.1 PCA算法降维处理
在图像识别过程中,如果采用原始特征空间的高维度进行模型训练会使计算复杂度大大增加,致使样本的统计特性无法估计。因此需要降低原始特征的维数。本文采用主成分分析PCA(Principal Component Analysis)法[14-15]实现特征抽取,以达到“约减维数”的目的,从而提高图像识别速度。
理想情况下,样本x的特征空间没有冗余信息,利用PCA算法可表示为(15)、(16)式:
y=MTx,
(15)
则,
(16)
其中,M=(m1,m2,…,mK)是RK特征空间的一组基底,对前k项的x进行估算,可得式(17):
(17)
由此产生的均方误差为:

(18)
根据拉格朗日乘子,在满足式(19)的条件下可得到均方误差极大值表达式(20):
(S-aiI)mi=0,i=k+1,k+2,…,K,
(19)

(20)

若用k个特征向量表示x时,其均方误差为式(21):
(21)
从式(21)可以得出,当ai的值越小,对应的特征向量信息减损越少。
本文通过改进HOG特征提取方法同时采用主成分分析PCA法约减维数降低特征向量的维度减少了计算的复杂度,提高识别速度。
3.2 构建SVM行为模型
支持向量机(Supper Vector Machine,SVM)[16-18]通过在样本空间计算出一个最优的平面把不同的样本区分开。如图5所示,H为分类面,H1、H2都平行于H,H1、H2是通过各类样本且距H最近点的超平面。若H满足分类间隔最大,则H为最优分类面。就意味着间隔越远,也就说明该分类器的推广能力越强。
设训练样本集为S,则
S={(x1,y1),(x2,y2),…,(xn,yn)},
yi∈{-1,1} .
(22)
最优分割平面方程定义为:
wTx+b=0 .
(23)
由SVM定义,若样本线性可分,则须满足下式条件:
yi(wTxi+b)≥1 ,
(24)
分隔间隔表示为式(25):
δjiange=yi(wTxi+b) ,
(25)
式中,yi表示所属类别,取值范围为[-1,1],xi是针对样本的特征向量。
分类器用于分类的函数简写为式(26):
f(x)=w·x+b.
(26)
设阈值为0,由于样本所在类已确定,则有yi(wxi+b)>0始终成立,用|f(xi)|来表示。说明几何间隔可用分类间隔表示,如式(27):
δjihejiange=|f(x)|/‖w‖ .
(27)
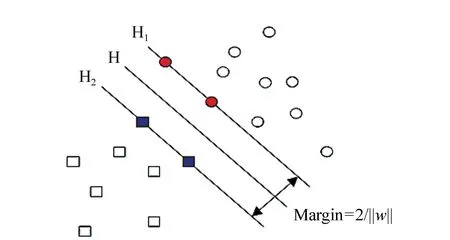
图3 最优分类面示意图 Fig.3 Schematic diagram of optimal classification
在对分类间隔进行调整后,得到最优分类面,如图3所示。 图3中,H1,H2两个分类面之间距离即是公式(27)中所定义的几何间隔。
当样本发生错误分类时,错误分类的次数T为式(28):
(28)
其中,R=‖xi‖,i=1,2,…,n,xi表示第i个样本的特征向量。
特征向量的最大值R即为‖xi‖中的最大值。为减少错误分类的次数,就要求有较大的几何间隔,故而,将任务调整为:
(29)
由此,转化为一个最优二次规划问题。此类问题的求解可通过拉格朗日方法解决。构造拉格朗日函数式(30):

(30)
式中,ai表示的是拉格朗日因子。分别对w,b求解偏导数:
(31)
将式(31)的结果代回式(30),可得:

(32)
对式(32)进行最值求解,结果就是所需要的目标函数。
3.3 用SVM训练车型图像样本集
本文使用SVM对分类样本的学习训练,从而达到完成分类的工作。进行样本训练时采用LibSVM库,由于LibSVM使用一对一策略,即两类样本之间构建一个SVM,m种样本需构建m(m-1)/2个SVM。在对车型的样本图像进行训练时,首先将用HOS方法提取的特征向量通过PCA降维后存入一个文本文件中,每一张图片存储成一个特征向量。将特征向量转化为标准的SVM样本格式进行训练,程序的主要参数如表1所示。

表1 样本训练程序参数
为了提高SVM训练样本的收敛速度,本文通过增设缓冲区的方法,将样本分成多个样本子集,一部分子集先预存于缓冲区中,每次都训练缓冲区的样本,能被确定属性的样本离开缓冲区。当所有样本子集都经过训练后,算法结束。
4 实验结果及分析
4.1 数据集
为了验证本文算法对车型识别的性能,在实验中所采用的车辆图像由本实验室所建的车辆图像数据集,收集了4 000余张各种车辆图像,图4是数据集中的拍摄时间、角度、距离不同类型的车辆图片,包含常见的SUV车型、轿车、面包车等车型,用于车辆识别检测实验。在训练阶段选取若干张车辆图片作为正样本,选取不同张不同交通环境背景的图片作为负样本,通过SVM分类器进行训练,获得正、负样本模型。

图4 数据集样例图片 Fig.4 Sample pictures of data set
4.2 同类型车型的识别结果及分析
用SVM分类器测试算法时可能出现正样本检测为正样本、正样本检测为负样本、负样本检测为负样本、负样本检测为正样本四种情况。因此对车型检测识别的准确率定义为:

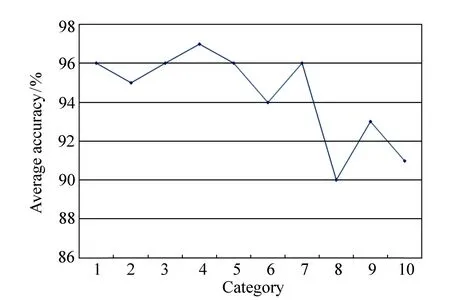
图5 每类车辆图片平均识别准确率 Fig.5 Average image recognition accuracy for each type of vechile
为客观检验本文提出的方法在车型识别中的有效性,本文在自建的车辆图像数据集进行5次独立的实验,每次随机选取2 058幅图像进行特征提取,并使用SVM进行学习分类训练作为正样本,选取1 255幅图像进行特征提取作为负样本。每次随机选取1 000幅图片进行识别测试,由于不同次仿真实验挑选不同的训练样本和测试样本,同一类车辆图像在不同次实验中误识数量也会发生变化。每类图片识别正确率如图5所示。
图5说明了各类车辆图像识别的平均准确率,第4类的平均准确率最高,达到97%,这主要受此类车辆外形轮廓影响。
4.3 不同类型车型识别实验效率对比及分析
在车辆图像数据集中,训练正样本数量2 236,负样本数量1 225,使用LibSVM在不同算法下,进行5次实验,每次随机选取1 000幅图片进行识别测试,实验对比结果如表2所示。
表2车型识别实验结果

Tab.2 Experimental results of model identification (%)
在车辆图像分辨率大下不同的情况下,传统HOG特征和改进的HOG特征的提取时间对比如图所示。检测窗口的大小为128×64,滑动距离16×16,各种分辨率条件下的车型识别时间同样以1 000幅随机车辆图片为准。
从识别速度对比图(图6)来看,在车辆图片不同的分辨率条件下,本文提出的识别方法所用的时间较短,图片分辨率的值越高,识别速度的差距就越大。

图6 两种算法不同分辨率的识别时间对比 Fig.6 Recognition time contrast of two algorithms with different resolutions
仿真实验结果表明,在同类型及不同类型的车辆外形识别中,本文方法有较高的识别率,平均识别率达到92.36%,高于传统HOG算法的识别率84.88%。同时识别效率也高于传统HOG算法,提高了3.45%。
5 结 论
本文将传统的HOG算法与方向可控滤波器相结合,提出了HOS算法对车辆图像进行特征提取,同时采用主成分分析法(PCA)约减特征向量维数,降低计算特征向量的复杂程度,并使用SVM学习方法作为样本分类器进行分类识别车型。仿真实验结果表明,本文所提出的基于改进的HOG-SVM车辆识别算法和传统HOG算法相比,具有较高识别率和识别速度,并且对不同环境背景、不同角度、不同距离有较强的抗干扰性,能够满足智能交通系统中车辆识别监管的需要。
参考文献:
[1]PSYLLOS A,ANAGNOSTOPOULOS C N,KAYAFAS E. Vehicle model recognition from frontal view image measurements[J].ComputerStandards&Interfaces,2011,33(2):142-151.
[2]WANG Y,LI H,KIRUI C K,etal. Vehicle discrimination using a combined multiple features based on vehicle face[J].LectureNotesinElectricalEngineering,2013,256:503-511.
[4]ABADI E A J,AMIRI S A,GOHARIMANESH M,etal. Vehicle model recognition based on using image processing and wavelet analysis[J].InternationalJournalonSmartSensing&IntelligentSystems,2015,9(2):3-8.
[5]SONG M. Vehicle model recognition based on SURF[J].JournalofInformation&ComputationalScience,2015,12(17):6249-6256.
[6]ZHANG X D,QIAN W,GAO J,etal. Vehicle model recognition system based on sparse bayesian classification[J].Mini-microSystems,2005:232-238.
[7]WANG Y Q,HUANG R J,XU T Y,etal. Vehicle model recognition based on fuzzy pattern recognition method[J].AdvancedMaterialsResearch,2012,383-390:4799-4802.
[8]ZHANG Z,TAN T,HUANG K,etal. Three-dimensional deformable-model-based localization and recognition of road vehicles[J].IEEETransactionsonImageProcessing,2012,21(1):1-13.
[9]HSIEH J W,CHEN L C,CHEN D Y. Symmetrical SURF and its applications to vehicle detection and vehicle make and model recognition[J].IEEETransactionsonIntelligentTransportationSystems,2014,15(1):6-20.
[10]CHEN Z,PEARS N,FREEMAN M,etal. A Gaussian mixturemodel and support vector machine approach to vehicle type and colour classification[J].IetIntelligentTransportSystems,2014,8(2):135-144.
[11]叶峰,陈灿杰,赖乙宗,等.基于有序Hough变换的快速圆检测算法[J].光学 精密工程,2014,22(4):1105-1111.
YE F,CHEN C J,LAI Y,etal. Fast circle detection algorithm using sequenced Hough transform[J].Opt.PrecisionEng.,2014,22(4):1105-1111.(in Chinese)
[12]宋悦,林志贤,姚剑敏.基于ε-支持向量回归机的背光源亮度均匀性评价方法[J].液晶与显示,2015,30(5):857-863.
SONG Y,LIN ZH X,YAO J M. Luminance uniformity evaluation for backlight based on ε-support vector regression[J].ChineseJournalofLiquidCrystalsandDisplays,2015,30(5):857-863.(in Chinese)
[13]李姜,郭立红.基于改进支持向量机的目标威胁估计[J].光学 精密工程,2014,22(5):1354-1362.
LI J,GUO L H. Target threat assessment using improved SVM[J].Opt.PrecisionEng.,2014,22(5):1354-1362.(in Chinese)
[14]王洪涛,李丹.基于改进粒子群算法的图像边缘检测研究[J].液晶与显示,2014,29(5):800-804.
WANG H T,LI D. Image edge detection based improved PSO algorithm[J].ChineseJournalofLiquidCrystalsandDisplays,2014,29(5):800-804.(in Chinese)
[15]黄璇,郭立红,李姜,等.磷虾群算法优化支持向量机的威胁估计[J].光学 精密工程,2016,24(6):1448-1454.
HUANG X,GUO L H,LI J,etal. Threat assessment of SVM optimized by Krill Herd algorithm[J].Opt.PrecisionEng.,2016,24(6):1448-1454.(in Chinese)
[16]贾苏娟,韩广良,陈小林,等.光度非均匀彩色序列图像超分辨率重建[J].液晶与显示,2014,29(1):106-113.
JIA S J,HAN G L,CHEN X L,etal. Super-resolution reconstruction with photometric change of color image sequence[J].ChineseJournalofLiquidCrystalsandDisplays,2014,29(1):106-113.(in Chinese)
[17]徐超,高敏,杨锁昌,等.视觉注意机制下的粒子窗快速目标检测[J].光学 精密工程,2015,23(11):3227-3237.
XU CH,GAO M,YANG S CH,etal. Visual attention mechanism-aided fast target detection by particle window[J].Opt.PrecisionEng.,2015,23(11):3227-3237.(in Chinese)
[18]柯洪昌,孙宏彬.图像序列的显著性目标区域检测方法[J].中国光学,2015,8(5):768-774.
KE H CH,SUN H B. A saliency target area detection method of image sequence[J].ChineseOptics,2015,8(5):768-774.(in Chinese)