通航飞行训练教学辅助系统的研究与实现*
2018-04-19夏正洪朱晓波
夏正洪,朱晓波,罗 超
(中国民用航空飞行学院空中交通管理学院,四川 广汉 618307)
0 引言
通用航空飞行训练高度在修正海平面气压3 000 m以下,通常采用地标罗盘领航技术导航。飞行前准备时采用1∶100万航图进行纸质作业,精度不够且携带不方便;同时学员必须拉领航尺计算地标罗盘领航诸要素如真空速、地速、偏流角、应飞磁航向、预计飞行时间等,过程繁琐、效率低下。因此,面对快速增长的通用航空训练飞行需求,亟需研究新的教学模式,保障安全的情况下缩短飞行前准备时间,提高训练飞行效率。
2000年,郭达伟开发了分布式虚拟现实飞行训练系统,对其关键技术及其实现方法进行了深入分析[1]。2008年,陶德桂等实现了无人机的计算机仿真,并对其实际飞行数据和仿真数据对比来修正,可使领航人员迅速掌握领航要领[2]。2010年,张玲等基于飞行训练模拟器设计了飞行仿真系统,讨论了软硬件交互的大型复杂系统的集成优化方法[3]。2012年,夏正洪等针对通航应急救援效率低下现状,研究了救灾指挥点与灾区的救援航空器分配算法[4],并基于形态学的图像处理和A*搜索算法,研究了救援直升机的二维航迹规划方法和最短飞行路径,为通航应急救援预案的产生奠定了基础[7]。柯强等分析ADS-B在飞行训练管制指挥的应用与运行要求,并评估飞行训练间隔的安全性[5]。2013年,程斌提出了飞行训练过程仿真再现方法,实现对飞行训练质量的评估[6]。潘卫军等采用Vornonoi图方法进行基于GIS的山区直升机救援飞行路径规划研究,能有效地缩短救援飞行时间[8]。可见,飞行训练平台方面的研究主要集中在模拟器及其仿真,飞行效率方面研究主要集中在航空应急救援领域,而对通航飞行训练前的准备研究工作以及通航训练飞行教学培训方面缺乏关注,研究成果甚少。
本文针对当前通航训练飞行前准备繁琐、效率低下等缺点,提出开发一套通航训练飞行教学辅助系统。系统提供高精度电子地图替代传统的纸质地图作业,结合先进的计算机技术改变传统低效落后的教学模式,能快速地根据输入的低空风向、风速,航空器的飞行高度和表速,快速获取各种地标罗盘领航要素;结合航空器训练飞行科目和飞行算法,将航空器二维飞行和三维模拟飞行同步显示,使得飞行员重点熟悉掌握航路飞行过程中的地形、重要障碍物信息,提高训练飞行安全性和效率。
1 模型构造
1.1 参数定义
R:地球的平均半径,单位(km)。
ri(Xi,Yi,Hi):航路点ri的经纬度坐标和高度信息;本文以0°经线为基准,东经取经度的正值,西经取经度的负值;南纬取90°加上纬度,北纬取90°减去纬度值,经过处后得到航路点ri的经纬度坐标变更为(MXi,MYi)。
Route={r1,r2,r3,…,rn}:航线 Route 由 n 个航路点构成。
anglei,j:航空器保持当前航向切入航线所需转弯角度。
Disi,j:航路点 i和 j之间的距离,单位(km)。
CheckDistance:航空器保持航向加入航路必须开始转弯的位置与飞机保持航向飞行并与航路交叉点之间的最短距离,单位(km)。IAS:航空器的指示空速,即从空速表上得到的直接读数,表征航空器推力的大小,单位节(kt)。
MTK:磁航迹角,航空器所在位置北端顺时针测量到航迹去向的夹角。
DA:偏流角,地速矢量偏离空速矢量的角度,即航迹偏离航空器纵轴的夹角。
WA:风角,风速矢量与地速矢量之间的夹角。
MC:航线角,两个航路点之间的相对方位角,预计的磁航迹角。
MH应飞:应飞磁航向,航空器所在位置北端顺时针测量到航向线的夹角。
ETAi,j:航空器从航路点i到j的预计飞行时间,单位秒(s)。
tr:航空器的转弯率,单位(°/s)。
r:航空器的转弯半径,单位(km)。
t:航空器以tr的转弯率转过anglei,j所需时间,单位秒(s)。
1.2 领航参数计算
通用航空飞行训练前准备的一项极其重要的内容是通过拉领航尺计算领航参数,本文采用计算机程序的方式替代传统拉尺获得领航参数如图1所示。首先依次读取两个航路点信息,根据航路点经纬度高度信息获取航空器的磁航迹角和航段长度,然后根据所输入的航段风向风速以及航空器的真空速获得飞机的偏流角、应飞磁航向、风角等参数,并根据正弦定理获得航空器的地速和航段预计飞行时间。
其中,航空器的真空速、地速与风速之间的矢量关系如图2所示。
如果已知两个航路点的经纬度坐标信息,则可以使用三角式(2)和式(4)获得航路点之间的磁航迹角和航段长度。
应飞磁航向MH等于磁航迹角MTK与偏流角DA之差。
风角WA等于风向WD与航迹角MC之差。
由图2可知,结合正弦定理,偏流角DA和航空器地速GS可以通过式(8)和式(9)获得。
预计到达时间ETAi,j等于航路点i和j之间的航段距离Disi,j除以航空器的地速GS。
1.3 航空器飞行算法
航空器起飞后通常可以当前航向加入航线或指定航路点加入航线,其中指定航路点模式下航空器将直飞目标点,然后航空器将保持飞向目标航路点的航向,进入保持航向加入航线模式:求解保持当前航向与目标航段的交叉点CP,并不断地求解飞机当前位置与CP点之间的距离,如果该距离小于CheckDistance(航空器最晚转弯点与CP点之间的最小距离),则开始转弯并不断地比较航空器已转过的角度θ与飞机加入航线所需转弯角度anglei,j,若θ=anglei,j则转弯结束,航空器保持当前航向飞向下一个航路点[4],其示意图如图3所示。
由图3可知,航空器当前位置点(Xcur,Ycur)保持航向MH飞行,飞行轨迹将于航段相交于CP,其经纬度坐标可以由两条直线交点获得。
其中,(MXi,MYi),(MXj,MYj)分别为航路点i和j的经纬度坐标的修正值;(MXcur,MYcur)为航空器当前位置点的经纬度坐标修正值。
因此,沿航线飞行可视为直飞下一个航路点和转弯过程的不断重复,其流程图如图4所示。
2 系统实现及数值仿真
2.1 通航飞行训练教学辅助系统实现
针对通航飞行训练前准备教学过程繁琐、效率低下等缺陷,提出开发一套教学辅助系统。使用先进的虚拟现实结合计算机程序设计改变传统教学模式,快速获得各种领航参数,提高通航飞行训练前准备的效率。系统通过加载高精度等高线数字地图替代传统低精度纸质地图,能直观地显示障碍物、航路点的经纬度坐标、高度,可以任意放大缩小、移动该地图,显示并保存任意比例的航图。系统根据输入的表速、风速、风向以及航路点经纬度坐标等参数,快速获取真空速、地速、偏流角、应飞磁航向和预计各段航路飞行时间等地标罗盘领航要素;通过程序信息化,节约了传统教学模式中飞行前准备时拉领航尺获得领航参数的时间。系统提供通航飞行训练的二维和三维飞行模拟同步显示功能,给飞行员非常直观地感受障碍物的位置和飞行体验,提高了教学质量和训练飞行的效率和安全性。系统主要由数字地图GIS功能、领航要素计算、航线和障碍物管理、飞行模拟4个功能模块组成,如图5所示。
2.2 地标罗盘领航要素的计算
新津机场是中国民用航空飞行学院重要通航训练基地之一,机场标高460 m,跑道长度1 200 m。本文以新津机场02号跑道转场广汉避让邛崃机场的航线622PA(去程)为例如图6所示,通过本文所建模型求解飞行前准备中的地标罗盘领航参数。航空器起飞后上升至修正海压高度900 m,沿崇州VOR/DME台的径向线150°向台飞行,当到达A点(距崇州DME距离显示6.4 n mil(NM))时转航向0°飞往寿安镇,到达B点(崇州台40°径向线且DME距离为5.1 n mil)时,上升高度至1 100 m,飞机过寿安镇后上升航线高度修正海压1 500 m并直飞彭县,过彭县后转航向95°直飞广汉。
若航线上存在侧风,如果航空器通过每个航段起点仍然采用航向等于航线角(磁航迹角)飞行,则航迹就会偏向下风面;为了使得飞行轨迹与预计飞行航线相重合,则必须要修正偏流,采用飞机机头向上风方向飞行,即重点求出偏流角DA和应飞磁航向MN应飞。假设航空器的真空速节TAS=90节,风向WD=300°,风速WS=10节,航线角MC=330°。
根据领航参数计算模型可得,
风角WA=WD-MC=300-330=-30°,
由式(3)和式(4)可知,Dis1,2=18.21 km,
于是,训练飞行前准备过程得到所有的领航参数如表1所示:
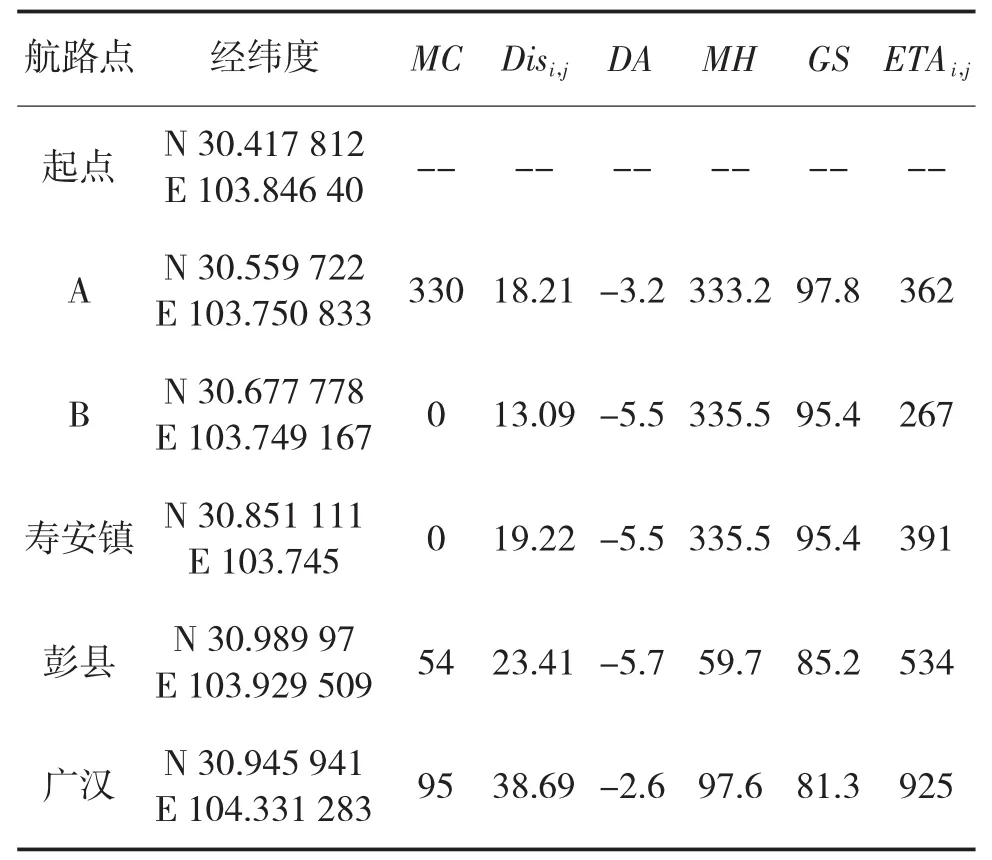
表1 622PA航线领航参数计算
2.3 训练航线飞行模拟
通航飞行训练教学辅助系统加载高精度KML数据并将其转换为电子地图显示,并具有GIS功能如放大缩小拖动等功能,系统读取并载入训练航线显示在地图中,可以选择训练机型并对其速度、航向、位置等参数进行初始设置,并获取地标罗盘领航参数,根据前述的航空器飞行算法进行二维飞行模拟,在飞行过程中将显示训练飞行时间、速度、航向等重要的飞行参数,通过不断地获取航空器位置的屏幕坐标,并将其转换成经纬度坐标,并通过数据传送模块将实时的经纬度坐标信息以KML文件的形式传送到三维显示模块,该模块调用Google Earth的API进行三维航迹演示如图7,基本可实现航线二维和三维飞行模拟显示同步,给飞行员提供直观的飞行过程体验,保障飞行安全性。
3 结论
针对通航飞行训练效率低、教学模式无法满足日益增长的训练需求现状,分析其瓶颈是飞行前准备需要使用领航尺获取多种领航参数。因此,采用计算机程序设计快速求解各种领航参数如偏流角、地速、应飞磁航向、预计飞行时间等;研究了航空器当前航向加入航线或指定航路点加入航线的飞行算法,指出了航空器加入航线实质上就是直飞航路点和转弯过程的不断重复。开发了通航飞行训练教学辅助系统,系统提供高精度电子地图替代传统的纸质地图作业,具有快速获取领航参数、二维和三维训练飞行模拟同步显示功能,使得飞行员重点熟悉掌握航路飞行过程中的地形、重要障碍物和地标信息,对于通航训练飞行安全和教学效率的提高有重要意义。
参考文献:
[1]郭达伟,徐乃平,戴冠中.一个分布式虚拟现实飞行训练系统的若干关键技术研究[J].计算机工程,2000,26(9):84-86.
[2]顾毓,施毅.基于虚拟现实的飞行保障指挥系统仿真[J].计算机工程与科学,2006,28(12):103-106.
[3]陶德桂,刘志强,钱伟.无人机飞行训练仿真系统设计与实现[J].计算机仿真,2008,25(3):289-293.
[4]夏正洪,潘卫军,林瑞春,等.重大灾害条件下的航空应急救援效率研究 [J].计算机工程与设计,2012,33(3):1251-1256.
[5]柯强,汪朝东.基于ADS-B的民航飞行训练安全间隔初步评估[J].科技通报,2012,28(2):164-166.
[6]程斌,刘峥,杨林.基于视景仿真技术的飞行训练过程仿真再现方法研究 [J].系统仿真学报,2013,25(S1):379-382.
[7]夏正洪,潘卫军.多救援直升机多目标分配与航迹规划研究[J].科学技术与工程,2013,13(34):10226-10231.
[8]潘卫军,罗小林,康瑞.基于GIS的直升机山区救援飞行路径规划[J].中国安全科学学报,2013,23(5):156-160.