ARX模型组在四旋翼飞行器建模中的应用
2018-04-16刘丽丽左继红
刘丽丽 左继红 吴 军
(1.湖南铁道职业技术学院 株洲 412001)(2.长沙理工大学电气与信息工程学院 长沙 410083)
1 引言
近年来四旋翼飞行器在航拍、侦察、勘探和监控等方面应用广泛[1]。但是四旋翼飞行器是一个典型的多变量、非线性、强耦合和欠驱动的系统,使得控制变得复杂。文献[2~5]采取线性控制策略进行解耦控制,但在非平衡工作点处无法使系统保持稳定状态。文献[6~8]采用滑模控制策略进行系统控制,但需要不断切换工作区间,造成系统抖动,控制效果不理想。文献[9~11]采取反步法设计控制器,但是该法对模型的精确性有较高要求。本文从飞行器系统的非线性出发,采取ARX建模理论建立系统的ARX模型组,基于此模型设计了自适应LQR(linear-quadratic regulator)控制策略来控制四旋翼飞行器的姿态和位置。通过仿真与实时控制实验,证实该法控制效果优良,能使系统在较短时间内达到稳定。
2 四旋翼飞行器本体介绍
本文所采用的四旋翼飞行器实验平台如图1所示[12],它可以用来检验建模和控制方法在四旋翼飞行器中的使用效果。为降低控制的难度及延长飞行器的使用寿命,固定其三个自由度,重点研究其姿态控制。姿态控制包括飞行器的前进后退和左右平移,对于飞行器系统来说至关重要。从图中可看出,3个旋翼水平安装,它们决定了飞行器的俯仰和翻转姿态,还有一个竖直安装,决定了飞行器的巡航方向。故该系统有3个输出4个输入。输出分别是翻转角、俯仰角和巡航角,输入分别是旋翼上四个电机的电压。

图1 四旋翼飞行器实验平台
3 ARX模型组建模
3.1 ARX模型建模
ARX建模理论[13]多用于系统的线性建模,对于非线性系统,可采用一组ARX模型进行描述。将全局工作区分为若干区间,每个区间可采用一个ARX模型进行描述其动态特性,整个工作区的非线性动态特性就可以采取一组ARX模型进行描述。四旋翼飞行器的俯仰角和翻转角决定其姿态,飞行姿态体现了非线性特征。故依据俯仰角和翻转角的工作区间范围,根据式(1)将系统的全局工作区平均划分为16个区间

其中m代表区间号,fix()代表取整函数。俯仰角范围从2°~42°,通过取整函数可以均衡划分4个工作区间,翻转角范围从5°~35°,通过取整函数也可以划分成4个区间,这些区域相互交叉,可以组成16个区间。如当p=32,r=20时,区间号m=14。
在每个工作区间,采取ARX建模理论进行建模,并辨识出参数得到局部ARX模型。这些局部区间模型结构相同,辨识方法也相同,任一局部线性模型按照下述方法进行建模。
对于4输入3输出的四旋翼飞行器,其局部线性ARX模型为

其中Y(t)=[p(t)r(t)y(t)]T代表输出俯仰角、翻转角和巡航角,输入u(t)=[Vf(t)Vr(t)Vl(t)Vb(t)]T表示四个电机电压,na、nb和d表示模型阶次,e(t)表示建模误差,系数矩阵Ak和Bk为

设某一状态下输出和输入分别是Ys和Us。则模型(2)可转换为模型:
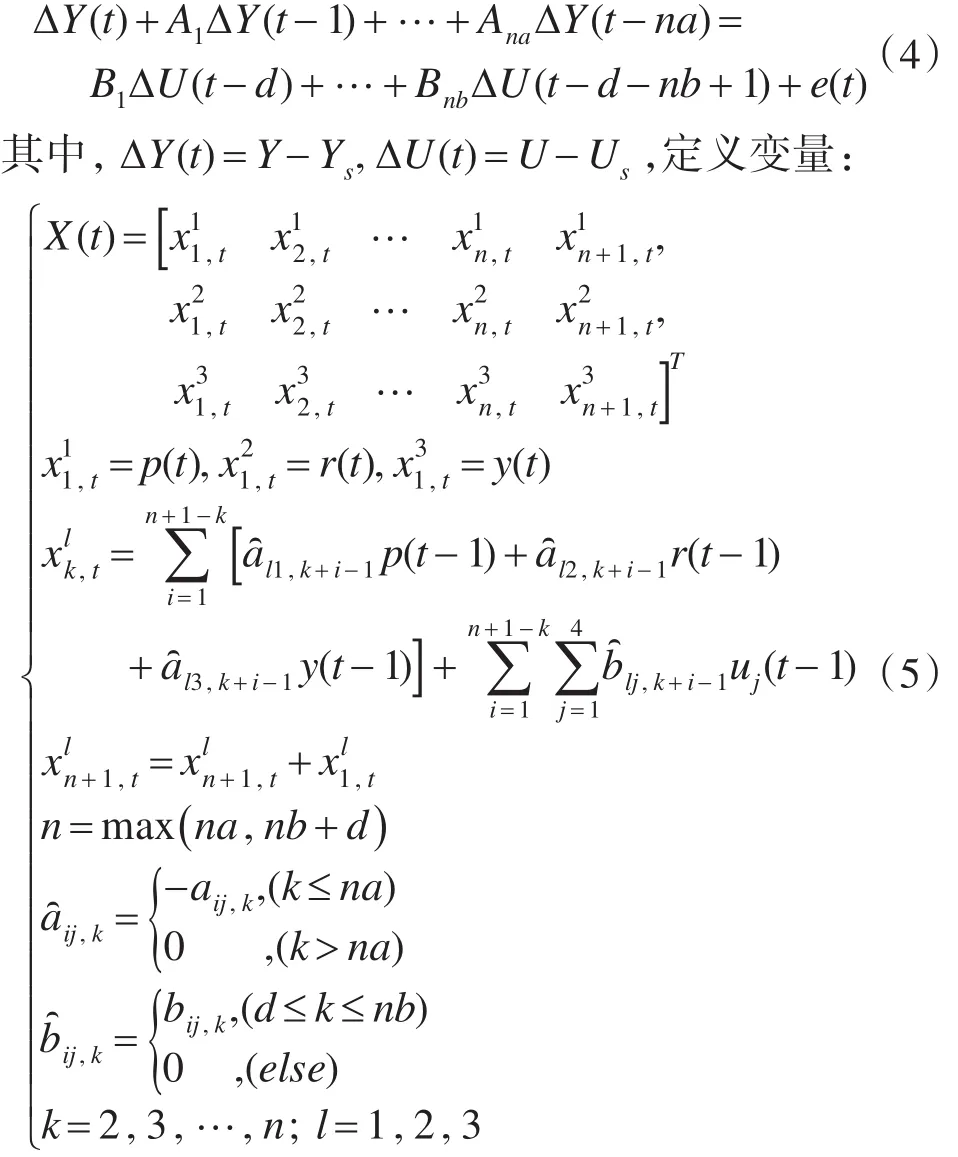
则模型(4)可转换为状态模型[14]:


3.2 模型辨识
模型阶次的确定有多种方法,如损失函数法、Akaike法和AIC准则等。这里采用AIC准则[15]来计算模型阶次,计算公式如下

其中N代表数据的长度,||Σ代表模型残差协方差矩阵的行列式。
采集物理模型下飞行器系统运行数据,做为辨识模型的数据。四旋翼飞行器模型组中每个局部模型的辨识过程一样。使飞行器稳定运行在一工作区间,在此基础上加一白噪声信号,使飞行器摆动体现动态非线性特性。并釆集此时输入输出数据,作为模型辨识数据。
采用最小二乘法辨识模型参数,不同阶次下,计算出模型的AIC值。综合权衡AIC值和实控效果,确定模型阶次为na=3,nb=1,d=2 。
3.3 模型输出结果分析
以工作区间号11为例,图2~图4是飞行器运行在该区间内,它的三个输出(俯仰角、翻转角和巡航角)的ARX模型输出与系统实际输出间的对比情况。
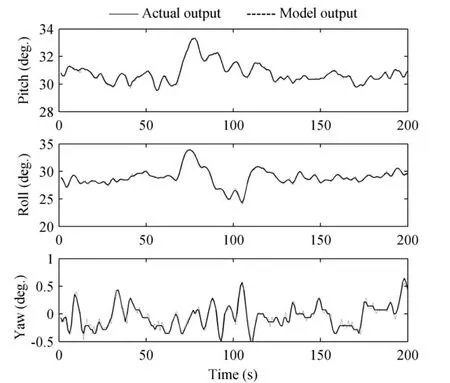
图2 ARX模型输出与实际输出对比
图2~图4表明,俯仰角在30°~34°之间波动,误差分布在-0.2mm~0.2mm之间,翻转角在25°~35°之间波动,误差分布在-0.4mm~0.4mm之间,巡航角在-0.5°~0.5°之间波动,误差在-0.1mm~0.2mm之间,整体来看模型输出误差相对比较小,误差的分布类似白噪声,模型能够较好反映飞行器系统局部动态特征。依据同样的建模及辨识方法,可以得到全部工作区间内的模型,从而达到建立全局模型的目的。

图3 ARX模型输出误差图
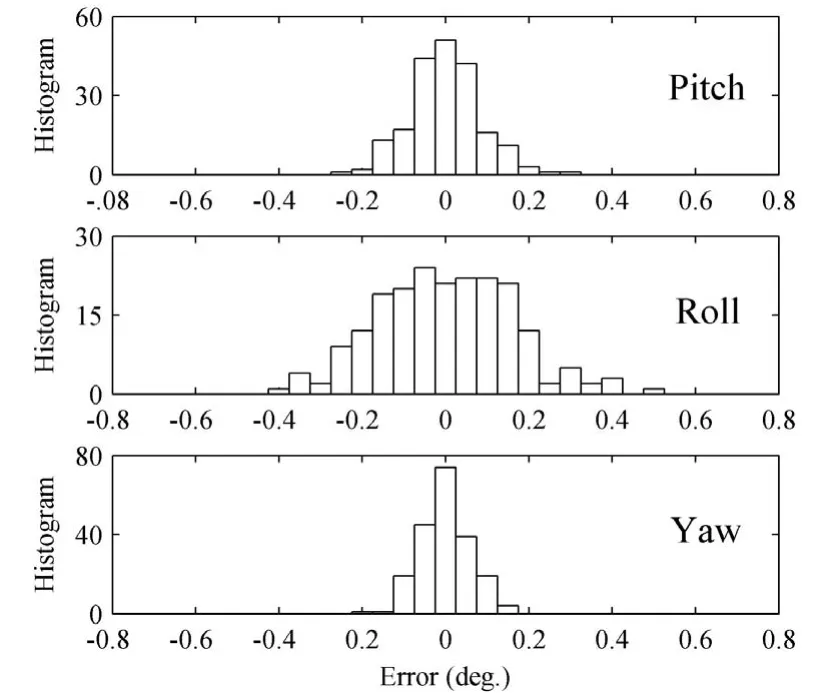
图4 模型输出误差直方图
为进一步验证模型的精确性,可以局部放大某工作区间内ARX模型预测输出与系统实际输出,分析误差分布。图5~7分别表示四旋翼飞行器俯仰角、翻转角和巡航角的ARX模型输出与实际输出情况。从图中可以看出系统的模型输出能很好跟踪系统的实际输出,模型拟合精度较高,能较好描述系统的非线性特性。
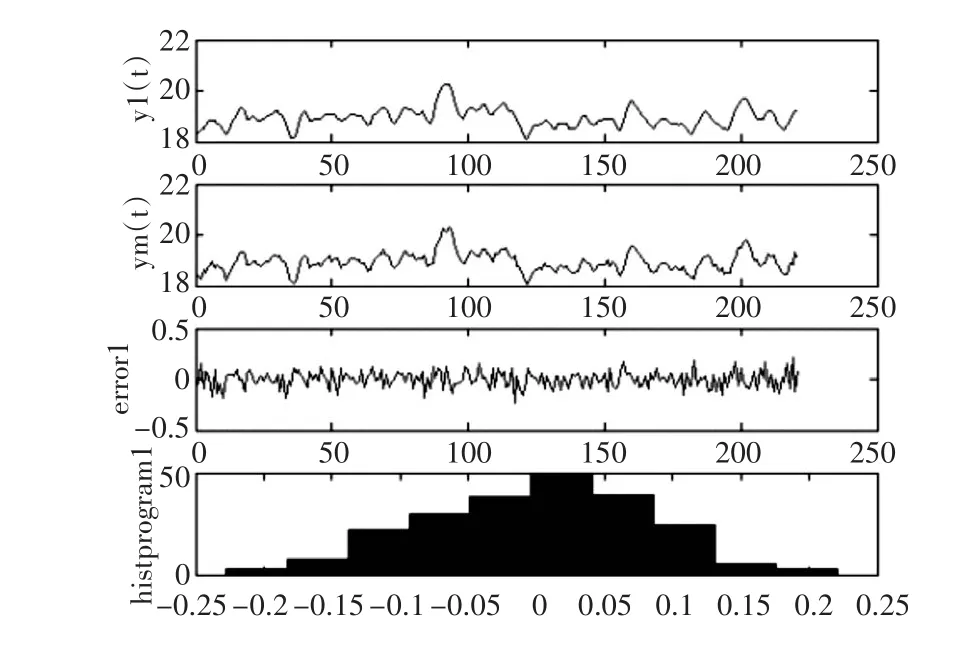
图5 俯仰角两者输出对比(y1(t)代表实际输出,ym1(t)代表模型输出)

图6 翻转角两者输出比较(y2(t)代表实际输出,ym2(t)代表模型输出)
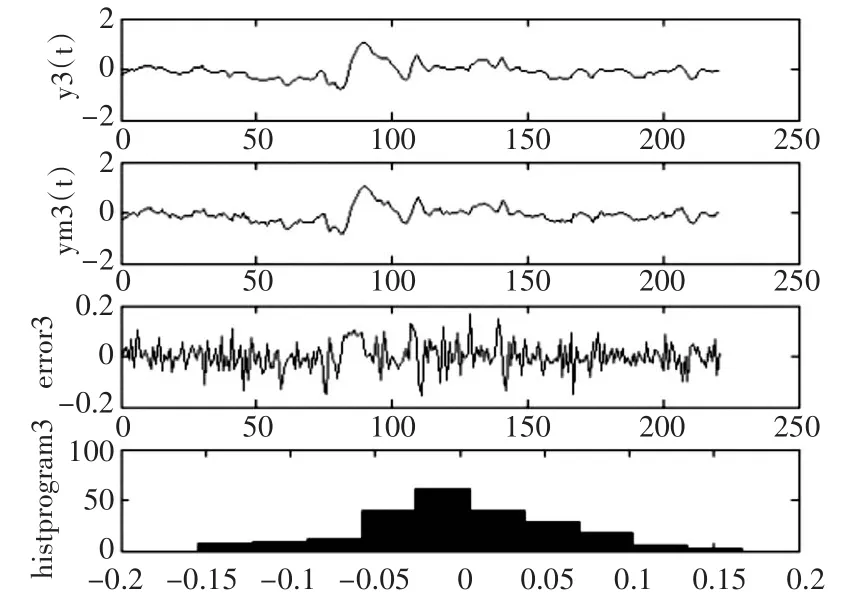
图7 巡航角两者输出比较(y3(t)为实际输出,ym3(t)为模型输出)
4 结语
针对具有较强非线性和耦合的四旋翼飞行器系统,采用一种新型ARX模型对其进行建模,详述了辨识模型参数的方法,通过模型预测输出仿真结果观察建模精度,结果显示该建模方法具有较高的建模精度,模型能很好描述系统全局非线性特征。
[1]Fu J,ChaiTY,Su CY,etal.Motion/force Tracking Control of Nonholonomic Mechanical Systems via Combining Cascaded Design and Backstepping[J].Automatica,2013,49(12):3682-3686.
[2]Bresciani T.Modelling,Identification and Control of a Quadrotor Helicopter[D].Lund:Lund University,2008.
[3]Saif A,Hiddabi A.Quadrotor Control Using Feedback Linearization with Dynamic Extension[C].Proceeding of the 6th International Symposium on Mechatronics and its Applications,Sharjah,2009.
[4]Altug E,Erginer B.Modeling and PD Control of a Quadrotor VTOL Vehicle[C]//IEEE International Conferance on Vehicles Symposium,Istanbul,2007.
[5] Bouabdallah S,Siegwart R.Backstepping and Sliding-mode Techniques Applied to an Indoor Micro-quadrotor[C]//Proceeding of the IEEE International Conference on Roboticsand Automation,Barcelona,2005.
[6]González Iván,Sergio Salazar,Rogelio Lozano.Chattering-Free Sliding Mode Altitude Control for a Quad-Rotor Aircraft:Real-Time Application[J].Journalof Intelligent&Robotic Systems,2013,73(1-4):1-19.
[7]Tan L N,Lu L B,Jin G D.Attitude Stabilization Control of a Quadrotor Helicopter Using Integral Backstepping[C]//Automatic Control and Artificial Intelligence(ACAI 2012),2012.
[8]McKerrow P.Modelling the Draganflyer four-rotor helicopter[C]//IEEE International Conference on Robotics and Automation,4,2004.
[9]Bouabdallah S,Noth A,Siegwart R.PID vs LQ Control Techniques Applied to an Indoor MicroQuadrotor[C]//IEEE International Conference on Intelligent Robots and Systems,2004.
[10] Bouabdallah S,Siegwart R.Backstepping and Sliding-mode Techniques Applied to an indoorMicroQuadrotor[C]//International Conference on Robotics and Automation,Barcelona,2005.
[11] Scott D.Hanford.A Small Semi-autonomous Rotary-wing Unmanned Air Vehicle[D].U-niversity of Pennsylvania,2005.
[12]GOOGOL TECHNOLOGY LTD,“the manual of the quadrotor simulator”
[13]HuiPeng,Tohru Ozaki,Yukihiro Toyoda,Hideo Shioya,Kazushi Nakano, Valerie Haggan-Ozaki, Massafumi Mori.RBF-ARX model-based nonlinear system modeling and predictive controlwith application to a decomposition process[J].Control Engineering Practice,12(2004):191-203.
[14]徐仲,张凯院,陆全,等.矩阵论简明教程[M].北京:科学出版社,2001.145-151.XU Zhong,ZHANG Kaiyuan,LU Quan,etal.Introductory tutorial matrix theory[M].Beijing:science press,2001.145-151.
[15]秦宣云,卜英勇,夏毅敏.基于AIC准则优化的径向神经网络微地形曲面重构[J].中南大学学报(自然科学版),2004,35(5):815-819.QIN Xuanyun,BU Yingyong,XIA Yimin.Radial neural network based on AIC criterion optimization tiny terrain surface reconstruction[J].Journal of central south university(naturalscience edition),2004,35(5):815-819.
