浅谈石英挠性加速度计安装失准角的调试方法
2018-04-12段彤
段彤
(陕西宝成航空仪表有限责任公司,陕西 宝鸡 721006)
石英挠性加速度计是一种经典的高精度机械摆式加速度传感器,作为惯性导航、制导系统的关键部件,已广泛应用于航空、航天、航海、石油钻井等领域[1]。安装失准角θ是石英挠性加速度计重要的性能指标,它的大小可以在加速度计表头装配的环节通过专用吊装工装夹具进行调试,达到整表产品性能要求。
1 加速度计数学模型和失准角
加速度计的模型方程是表达加速度计的输出与沿加速度计输入基准轴IA作用的加速度等物理量之间数学关系的方程式。加速度计简化的模型方程可表示为:

式(1)中:E为加速度计输出,V;ai,ap,ao分别为沿IA、PA、OA轴作用的加速度,g;K0为偏值,g;K1为标度因数,V/g;K2为二阶非线性系数,g/g2;θo为摆态安装失准角,rad;θp为门态安装失准角,rad。
安装失准角又叫“输入轴安装误差”,定义为输入轴和与它相联系的输入基准轴之间的夹角。石英挠性加速度计的失准角就是壳体安装面的垂线(输入基准轴)与输入轴(无输入状态下石英摆片的垂线)之间的夹角。选取加速度计摆态安装或者门态安装任一状态,通过四位置(0°、90°、180°、270°)测试方法分析可得安装失准角计算公式,具体如下:

式(2)中:E(0°)、E(90°)、E(180°)、E(270°)为 4个位置时加速度计的输出值,V。
由公式(2)可知,通过翻转摆态或门态状态下正、反零位状态(0°、180°)的加速度计输出值就可以推算出安装失准角的大小情况。
2 石英挠性加速度计结构和工作原理
2.1 基本结构介绍
石英挠性加速度计主要由石英摆片组件、电容式传感器、伺服控制系统(包含力矩器和伺服电路)3个关键部分组成。具体零、组件如图1所示。
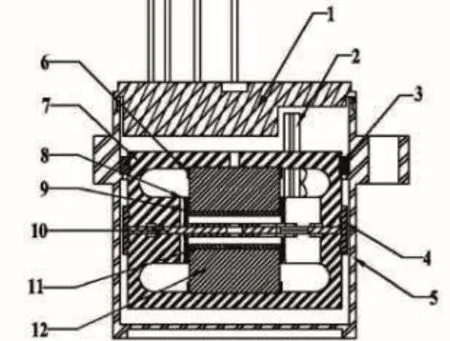
图1 石英挠性加速度计结构图
2.2 工作原理
加速度计沿输入轴方向受到加速度作用时,检测质量块将受到惯性作用而发生微小的偏转,偏离平衡位置,从而产生惯性力;内部摆片由于差动电容器间距发生改变而导致电容量发生变化,反馈到伺服回路中,放大器检测到这一变化转换为相应的电流信号再次反馈回力矩线圈上;力矩线圈处于恒定磁场中,产生的反馈力与输入加速度引起的惯性力相平衡,直到最后摆恢复到平衡位置。平衡时,Ma=BLI,则:

式(3)中:a为输入轴方向的加速度;m/s2;B为恒定磁场的磁感应强度,T;L为力矩线圈的总长度,m;I为输出电流,A;M为检测质量块的质量,g。
通过检测采样电阻两端的电流(或电压)大小就可以得到输入加速度的大小。
3 表头装配
如图2所示,石英挠性加速度计表头部分主要由表芯组件、隔离环和壳体组成。表头装配采用吊装的方式,利用吊装螺纹孔,将胶黏好隔离环的表芯组件悬挂吊入壳体,调试失准角到合适大小后,通过胶接的形式将表芯组件和壳体固定,形成合格的表头组件。
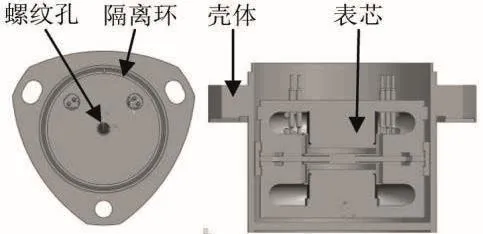
图2 表头组件结构示意图
4 失准角调试
利用表芯组件中心吊装螺纹孔,将表芯(带有隔离环)悬挂在吊装支架(专用工装)上,然后再通过旋转3个螺钉来调整,使得A面和壳体上的安装面夹角尽可能的小,这样就实现了加速度计安装失准角的调整目标。
5 结束语
本文阐述了石英挠性加速度计安装失准角的概念,结合数学模型、产品结构、工作原理等方面分析了石英加速度计安装失准角的测量方法,为产品表头装配过程中安装失准角的调试提供了理论依据。
参考文献:
[1]顾英.惯导加速度计技术综述[J].飞航导弹,2001(06):78-85.
