无人机被动音频探测和识别技术研究
2018-04-11王威安腾飞欧建平
王威,安腾飞,欧建平
无人机被动音频探测和识别技术研究
王威1,安腾飞1,欧建平2
(1. 长沙理工大学计算机与通信工程学院综合交通运输大数据智能处理湖南省重点实验室,湖南长沙 410114; 2.国防科技大学电子科学与工程学院,湖南长沙 410073)
为解决近场空域低、慢、小旋翼无人机的安全威胁,提出基于音频信号分析的无人机探测识别方法。该方法采用改进流程和参数的梅尔频率倒谱系数(Mel-Frequency Cepstral Coeffi-cients, MFCC)和其一阶差分作为无人机音频的特征参数,结合提出的多距离分段采集法,通过训练高斯混合模型(Gaussian Mixture Model, GMM),建立多特征的无人机音频“指纹库”,最后用特征匹配算法实现无人机的探测和识别。实验结果表明,所提出的方法在典型郊区环境中可实现150 m距离内无人机的探测和识别,识别率达到84.4%。
无人机;探测和识别;梅尔频率倒谱系数;高斯混合模型
0 引言
2016年被称为消费级无人机元年,无人机在各行业广泛应用的同时也带了很大的负面影响。近年来,国内外常报道无人机用于走私、恐怖袭击、侵占航线、侵犯隐私等非法用途。湖北日报微信号2017年06月21日报道:据民航部分公布的数据,2015年,全国发生无人机干扰民航飞行事件4起,2016年则发生23起,2017年仅仅上半年已经发生超过40起。对于无人机的探测和监管已迫在眉睫,因此,对无人机的探测和识别也显得尤为重要。
国内对于消费级无人机探测的研究较少,日本、法国、美国、俄罗斯等国家则已经相继推出了无人机探测和反制系统。目前已有基于红外、图像、无线信号、音频等技术来探测无人机的方法[1-4]。József Mezei等[5]利用互相关法证明了音频探测无人机的可行性,文献[6]在音频信号处理方面,使用了基于距离的思想实现近距离无人机探测和识别。文献[7-9]使用传声器阵列技术,基于波束形成及到达时间差 (Time Difference of Arrival,TDOA) 探测无人机,但只做到了大致的定向。
随着语音识别方法的逐渐成熟,考虑到语音和无人机音频的一些共性,很多专家和学者也尝试着将一些语音识别的方法应用于无人机探测。C Asensio等[10]使用MFCC来分辨无人机声音以及非无人机声音,在近距离和信噪比较高的情况下,具有很好的识别率,但没有考虑不同距离情况下无人机信号所表现的差异性。Louise Hauzenberger等[11]使用了线性预测系数(Linear Predictive Coefficient, LPC)结合短时过零率和短时能量的方法,可以在消音室环境下实现类型识别。Sungho Jeon等[12]针对特定条件下使用MFCC特征作为神经网络输入参数,达到了较好的识别率,但需要大量的环境模拟数据,训练样本是无人机信号和环境信号的人工混合信号,并要求无人机信号比环境峰值高出5%,虽然增加了训练样本量,但不能完全反映无人机飞行的真实环境状况。
目前常用的音频特征识别有隐马尔科夫模型(Hidden Markov Model,HMM)、支持向量机模型(Support Vector Machine,SVM)以及高斯混合模型。本文结合无人机飞行特点和传声器实际响应距离,提出训练数据采集法,改进流程,优化MFCC参数,最后使用GMM模型来实现对无人机音频信号的检测和识别。
1 无人机音频信号特征
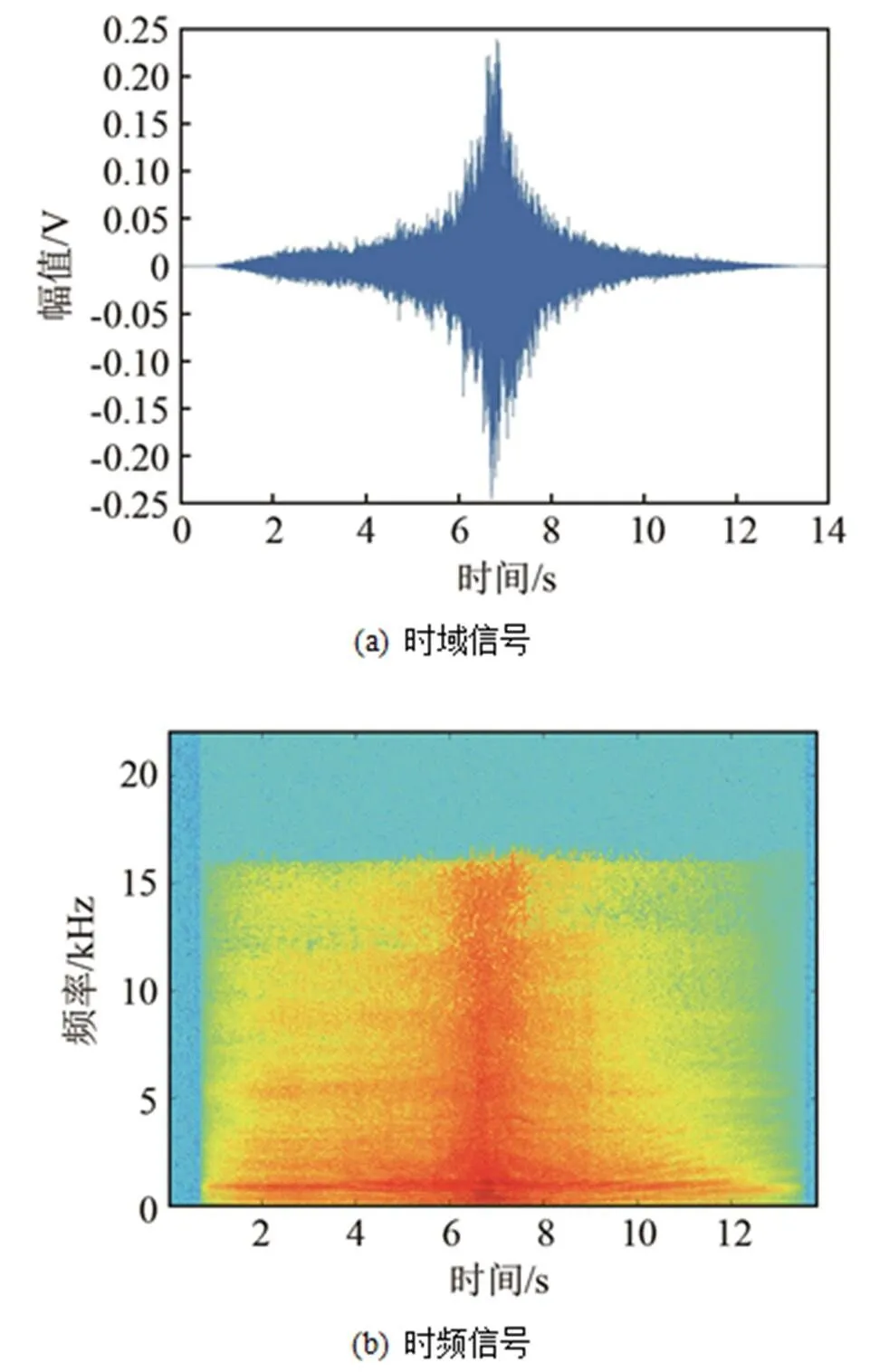
以某型无人机为例进行特征分析。通过实际采集的时域信号可知,信号幅度随着无人机的接近逐渐增大,随着无人机的远离而逐渐减小,如图1(a)所示。
如图1(b)所示,无人机时频图音频信号主要集中在低频部分,当无人机经过录音设备正上方时其高频成分明显加强。随着无人机相对距离的变化,其频率呈现出一定的多普勒效应。
从图1(c)可以看出,其频率信号具有一定的倍频关系。
通过分析多种类型的无人机音频信号(无人机音频噪声)得知,无人机的音频噪声主要为气动噪声和机械噪声。气动噪声主要来源于旋翼切割空气及机体与空气摩擦,该部分噪声主要分布于声音信号的低频部分,在空气中衰减慢,传播距离较远;机械噪声则主要由电机以及传动部件造成,该部分噪声主要分布在信号的高频部分,在空气中衰减较快。
对于大多消费级无人机,高频部分噪声在距离地面50~80 m之后衰减很大,几乎可以忽略不计,为了探测更远距离的无人机音频信号,本文重点研究无人机音频信号低频部分的探测和识别方法。
不同于武装直升机的气动噪声频率范围(30~400 Hz)[13],本文通过大量数据分析得知,无人机的气动噪声频率范围主要在130~2 000 Hz之间。频率范围与无人机电机类型(有刷电机和无刷电机)、外形结构、旋翼个数、旋翼大小和长度、电机转速等有关。
使用单传声器采集信号的情况下,远距离飞行的无人机的多普勒效应和谐波现象不太明显,旋翼个数对频率的变化影响不大,这一特点对构建无人机音频“指纹库”具有一定的指导意义。
另外,不同飞行状态下的无人机特点表现有所不同,而大多数文献中分析的是悬停状态下的无人机音频信号,故在实际应用中效果并不理想。
2 无人机音频探测和识别系统
本文提出的音频信号探测和识别系统框图如图2所示。

图2 无人机音频探测和识别系统框图
具体步骤如下:
(1) 预处理:对训练数据和测试数据进行预处理,包括降噪、带通滤波、分帧和加窗;
(2) 特征提取:提取无人机音频的静态特征和动态特征;
(3) 模型训练:训练数据的GMM模型,构建无人机音频模板库;
(4) 特征匹配:提取测试数据特征,通过特征匹配算法和无人机音频模板库进行匹配,得出识别结果。
2.1 预处理
在实际生活环境中,噪声分布范围较广,对无人机的音频信号具有全频带覆盖的影响,由于无人机的音频信号的低频部分主要分布于130~2 000 Hz,因此,识别过程中先使用sym8小波对其进行三层分解,再选取200~1 800 Hz范围的带通滤波,滤除绝大部分高频噪声,最后对无人机音频信号分帧,帧长为60 ms,帧移为30 ms,并选用汉宁窗减少频谱泄漏。
2.2 特征提取
Mel频率能够反映人耳对于不同频率语音的感知能力,而Mel频率倒谱系数(MFCC)利用了人耳听觉原理和倒谱的相关特性,被广泛应用于音频相关的识别任务中。因此实验采用MFCC作为无人机音频信号的基本特征参数。
为了更好地体现无人机音频信号特点,本文在传统求取MFCC基础上对流程进行改进,使用幅度谱代替能量谱,具体流程如图3所示。
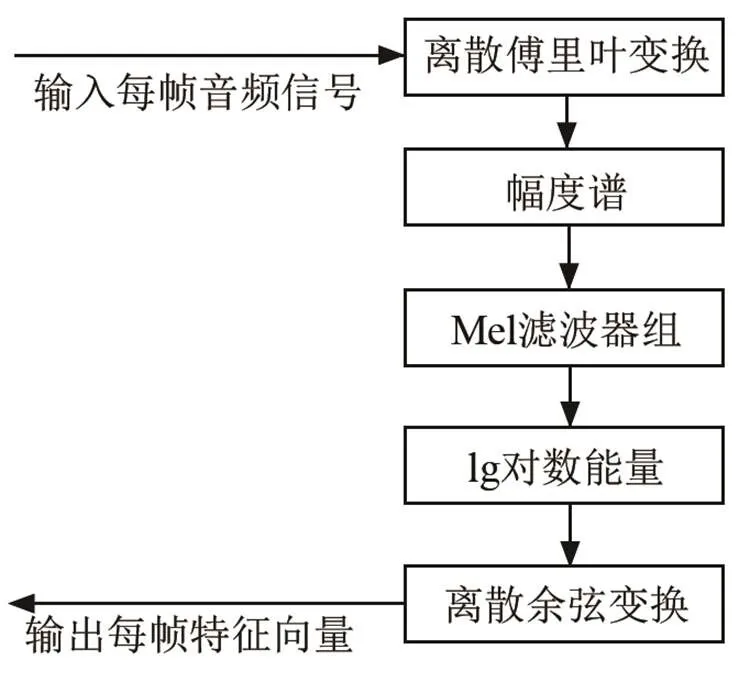
图3 改进的求解MFCC特征流程图


2.3 训练数据采集
根据得出的无人机音频信号特征,基于无人机飞行特点和传声器实际响应距离,本文提出多距离分段采集法。
在采集过程中,按照传声器实际响应距离采集无人机训练数据,每种型号的无人机至少在三种距离条件下分别采集悬停状态和飞行状态的音频数据,每个样本的数据长度范围30~50 s。三种距离分别是:
(1) 近距离样本,采样距离范围为20~30 m;
(2) 半距离样本,即按照传声器实际响应距离的一半采集;
(3) 2/3距离样本。
2.4 模型训练和识别
训练各种类型无人机的GMM模型参数的过程,也就是建立无人机音频模板库的过程。本文使用GMM模型来拟合无人机音频特征数据。通过期望最大化(Expectation-Maximization,EM)[14]迭代算法迭代计算GMM模型中混合权重、每个高斯模型的均值和方差。如果高斯混合模型中高斯模型的个数过多则会出现“过拟合”现象,因此需选用合适的高斯模型个数。


将参数带入后可得:

3 实验结果和分析
实验软件环境基于MATLAB8.0平台实现,采用i7双核2.5 GHz CPU、4 GB内存的普通笔记本电脑。所使用的音频数据均采用DC-900拾音器配备音频采集卡进行采集,采集地点在湖南省长沙市岳麓区,实验数据来自于DJI2、DJI3、DJI4、MavicPro、FPV250、ProMark P70、DJIS1000和某型植保无人机共8种大小结构不同、型号各异、旋翼个数有所差别的市面上常用的消费级无人机。
训练数据在楼顶相对安静的条件下按照2.3节的设定要求进行采集,测试数据在公园环境下采集(在采集部分测试样本期间有战斗机轰鸣声和强烈鸟鸣声),以验证系统对无人机的识别性能。每种类型无人机测试数据保存规则如表1所示。
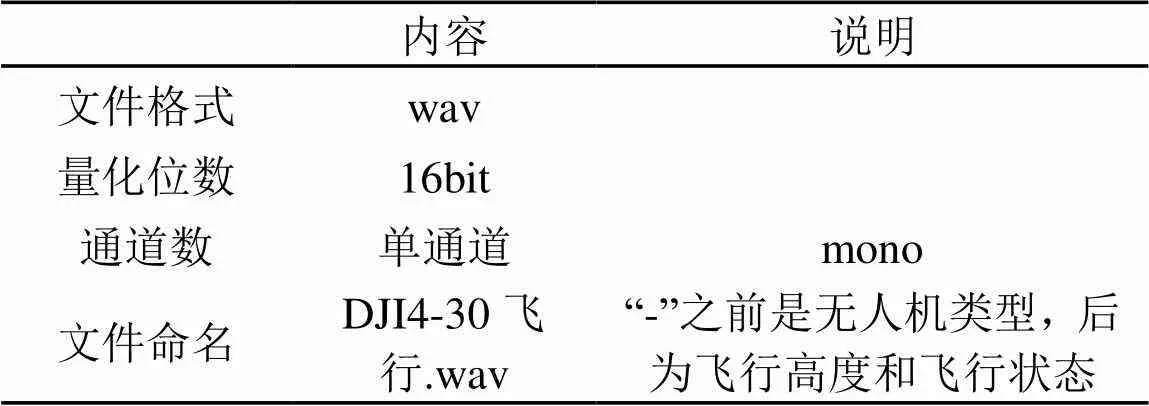
表1 测试数据保存规则
测试数据的采集规则如表2所示,根据无人机型号和限制飞行高度的实际情况按照规则进行采集,为了更贴近实际情况,使实验更具有代表性,具体的高度信息和飞行状态均是大概估计。
测试数据采用不同环境条件下不同距离段和不同飞行状态的无人机音频数据,共采集到115个测试文件,总时间长度为65 min。为得出最小探测时间,本文把测试文件按照时间长度进行切分,再对切分后的文件进行识别。图4为不同时间长度、不同高斯模型个数时系统的识别率。

表2 测试数据采集规则

图4 不同时间长度和高斯模型个数条件下的识别率
由图4可以看出,不同的时间长度下,当高斯模型个数为3时,识别率最高。系统取高斯模型个数为3,再测定不同时间长度下的识别率,识别结果如表3所示。

表3 不同时间长度的测试样本识别率(M=3)
从表3中可以看出,在样本时间长度为2 s时,识别率为84.37%。
通过综合分析可以看出,高斯模型个数为3,测试样本时间长度大于1.5 s时,系统识别率可以达到80%以上;当测试样本长度达到2.5 s以上时,系统识别率超过85%。系统用时相对合理,达到了接近实时探测和识别的效果,可以在郊区环境中探测和识别无人机,也为以后无人机探测和识别提供了新思路。
4 结论
本文提出了基于音频特征的无人机探测和识别方法,通过对数据的测试和分析,表明该方法易于实现,准确性高,能够满足150 m距离内对市面上常用无人机探测和类型识别的要求。在实际应用中,可以进一步通过调整传声器高度及朝向来减少大部分来自地面的噪音干扰,提升系统的整体性能。今后的研究重点是使用波束形成技术实现无人机的定位、定向和更远距离的探测。
[1] POPOVIC V, OTT B, WELLIG P, et al. Near-infrared high-resolution real-time omnidirectional imaging platform for drone detection[C]//SPIE Security+ Defence. International Society for Optics and Photonics, 2016: 999706-999706-7.
[2] VASQUEZ J R, TARPLEE K M, RIGLING B D. Multisensor 3D tracking for counter small unmanned air vehicles (CSUAV)[J]. Proceedings of SPIE-The International Society for Optical Engineering, 2008(6971): 11.
[3] BUSSET J, PERRODIN F, WELLIG P, et al. Detection and tracking of drones using advanced acoustic cameras[C]//SPIE Security +Defence. International Society for Optics and Photonics, 2015: 96470F-96470F-8.
[4] SHI W, BISHOP B, ARABADJIS G, et al. Detecting, tracking, and identifying airborne threats with netted sensor fence[M]. London: INTECH Open Access Publisher, 2011.
[5] MEZEI J, MOLNÁR A. Drone sound detection by correlation[C]//2016 IEEE 11th International Symposium on Applied Computational Intelligence and Informatics(SACI), Timisoara, 2016: 509-518.
[6] HEARING B, FRANKLIN J. Drone detection and classification methods and apparatus: U.S. 9275645[P]. 2016-3-1.
[7] BENYAMIN M, GOLDMAN G H. Acoustic detection and tracking of a class I UAS with a small tetrahedral microphone array[R]. Army Research Lab Adelphi Md, 2014.
[8] GENESCÀ M, ROMEU J, PÀMIES T, et al. Real time aircraft fly-over noise discrimination[J]. Journal of Sound and Vibration, 2009, 323(1): 112-129.
[9] CASE E E, ZELNIO A M, RIGLING B D. Low-cost acoustic array for small UAV detection and tracking[C]//Aerospace and Electronics Conference, 2008. NAECON 2008. IEEE National. IEEE, 2008: 110-113.
[10] ASENSIO C, RUIZ M, RECUERO M. Real-time aircraft noise likeness detector[J]. Applied Acoustics, 2010, 71(6): 539-545.
[11] HAUZENBERGER L, HOLMBERG Ohlsson E. Drone detection using audio analysis[J]. Geostandards & Geoanalytical Research, 2011, 35(3): 369-385.
[12] JEON S, SHIN J W, LEE Y J, et al. Empirical study of drone sound detection in real-life environment with deep neural networks[J]. arXiv preprint arXiv: 1701.05779, 2017.
[13] 葛欣宏. 飞行器被动音频探测与识别技术研究[D]. 长春: 长春理工大学, 2006.
[14] DEMPSTER A P, LAIRD N M, RUBIN D B. Maximum likelihood from incomplete data via the EM algorithm[J]. Journal of the Royal Statistical Society. Series B (methodological), 1977, 39(1): 1-38.
Research on audio detection and recognition of UAV
WANG Wei1, AN Teng-fei1, OU Jian-ping2
(1. Hu’nan Provincial Key Laboratory of Intelligent Processing of Big Data on Transportation, School of Computer & Communication Engineering, Changsha University of Science & Technology, Changsha 410114, Hu’nan, China;2. School of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073, Hu’nan, China)
In order to solve the security threat from low, slow and small rotor UAV (unmanned aerial vehicle) in the near field airspace, a method of analyzing the UAV audio signal is proposed. In this method, the Mel-Frequency Cepstral Coefficients (MFCC) and its first-order difference with improved solving flowchart and optimized parameters are used as the characteristic parameters of the UAV audio signal. The multi-distance segmentation method is used to train Gaussian mixture model (GMM) for the establishment of multi-feature “fingerprint library” of UAV audio signals, and finally the UAV detection and identification is achieved with the feature matching algorithm. The experimental results show that the proposed method can realize the UAV detection and recognition within 150m distance in typical suburban environment with an accuracy rate of 84.4%.
unmanned aerial vehicle (UAV); detection and identification; mel-frequency cepstral coefficients (MFCC); Gaussian mixture model (GMM)
TB53
A
1000-3630(2018)-01-0089-05
10.16300/j.cnki.1000-3630.2018.01.016
2017-05-20;
2017-07-26
国防973基金赞助项目(613XXX0301)
王威(1974-), 男, 山东青岛人, 教授, 研究方向为智能信息处理。
安腾飞, E-mail: anyuanjing@stu.csust.edu.cn
