水陆一体化扫测系统在长江中游河段河道地形测量中的应用研究
2018-04-09华东测绘地理信息有限公司杭州30000长江水利委员会水文局长江中游水文水资源勘测局武汉430000
, ,(. 华东测绘地理信息有限公司,杭州 30000;. 长江水利委员会水文局长江中游水文水资源勘测局,武汉 430000)
1 概 述
传统的河道勘测手段都是通过人工外业RTK或者全站仪测量,存在测量效率低、危险系数高、成果单一等缺点。随着测绘科学技术的进步,航空摄影测量、激光雷达测量、三维激光扫描测量、多波束扫测等新技术发展日趋成熟,为提高长江中游河道的测量技术水平,中游局对这些先进技术进行了反复研究,开展对应的实验工作,为找到一种既适合长江中游河道地形特点又能大力提高生产效率的测量手段提供决策依据。
本次实验将三维激光扫描系统与多波束测深系统[1]进行整合,形成河道陆域地形与水域地形一起扫测的水陆一体化测量系统。
2 数据采集
2.1 实验区选择及测线布设
本次实验区选在武汉河段,河段情况如图1所示。
图1 实验测区位置图
测线顺水流方向布设,为避免产生大量的冗余数据,三维激光扫描测线选择在近岸100m左右。
2.2 多波束测深
2.2.1仪器设备准备
本次施测的仪器设备为RESON SeaBat7125多波束测深系统,定位设备为Trimble SPS461,运动传感器为光纤罗经Octans。
2.2.2水深测量
①校准测量
多波束测深系统安装好后,要对整个系统进行安装误差的校正,它包括GPS定位罗经、GPS运动传感器的校正以及多波束水下探头安装姿态的动态校正。横摇、纵揺、艏向和延时4个方面。由于RESON SeaBat7125多波束测深系统直接接入了1PPS信号,因此主要校核横摇、纵摇、艏向3个参数[2]。
②校准计算
根据安装偏差角相互影响程度大小和校准方法,确定不同的校准顺序。由于在平坦地形进行横向校正不受其他偏差的影响,即横摇偏差校准独立于其他校正,故应予首先进行。艏向偏差对纵摇偏差的影响最小,应先于纵摇校准,最后进行纵摇测定。每一项参数校准都需要在特定的水下地形进行,经过外业数据采集、内业处理后计算才能完成。由于受潮位和声速的变化,可能会对多波束校准产生影响。本次多波束参数的校正时间是在白天的落潮稳定时段,此时能够将潮位和声速的影响降到最低,本次校准计算结果Roll=0.73、Pitch=4.31、Yaw=13.36。将改正参数输入多波束测深系统,不定时对校准参数进行检查,保证多波束测深数据的正确性[3]。
③多波束测深
系统测深过程中,天气良好,没有测出的横摇或纵倾超过补偿精度范围的情况发生。多波束测深前进行声速剖面测量,本系统声纳探头位于测船左舷位置,采用固定安装方式,探头安装牢固、受噪声干扰小。
将预先布置好的主测线导入测量软件中进行导航。当遇有船只或者水下异物挡住波的发射,产生空块时,均进行了补测。在线测量时,均使用小舵角修正航向,避免急转弯。在船调头时均提前结束测线,等船调好头后再上线,保证线上需用数据的完整性。
整个数据采集过程中,GPS卫星信号及数传信号良好,河床扫测条带回波信号呈像清晰,系统通过外接表面声速仪(RESON SVP 70)实时改正换能器表面声速,修正波束指向角度,提高精度。输入GPS 1PPS信号可使各设备UTC时间同步,避免因时间延迟降低测量精度。水下扫测点距平均约0.3m,扫测覆盖测区范围,测点重复度良好。
测量结束后,再次核对多波束测深系统的关键参数设置,及时将外业原始数据转换至内业软件能使用的数据格式,记录签字后,交付内业数据处理用[4]。
2.3 三维激光扫描测量
本次施测的仪器设备为Rigel VZ-400激光扫描测量系统,该系统集成了激光雷达扫描仪、高精度的POS系统(GPS/IMU)和计算机控制单元,具有集成度高、采集效率高、数据精度高、使用限制少、操作维护简单、快速拆装等特点。数据采集过程包括基站架设、采集准备、初始化准备、数据采集、结束和数据拷贝。
3 数据处理
3.1 多波束数据处理
对于多波束测得的水深数据,采用CARIS HIPS 9.1内外业一体化软件进行处理,由5个功能强大的模块组成:(1)设备校准模块;(2)水深编辑模块;(3)GPS位置编辑模块;(4)DTM模型网格模块;(5)网格拼接模块。其基本流程为:波束水深编辑-校正系统偏移值-加入声速计算-加入水位计算-建立数据格网模型-拼接数据-内插格网点位-输出网格点位。数据处理结束后,软件输出不同格网密度的水下测点高程,用于制作地形图。
3.2 三维激光扫描点云数据处理
3.2.1数据预处理
数据预处理主要包括POS解算、激光处理和坐标转换。其中:POS解算生成PosT文件,可按时间输出载体的位置、姿态信息;激光处理则对原始激光文件进行解码,并对激光点坐标进行转换,从而得到WGS-84坐标系下的LAS格式点云;坐标转换是根据用户需求,将点云成果转换到工程独立坐标系下[5]。
3.2.2点云数据后处理
点云后处理包括点云抽稀、噪点剔除、滤波分类等,数据通过精细分类后,剔除了植被点、噪声点、建筑物点等地物点,获得精准的地面点,并提取出保留了特征地形的高程点数据[6]。
3.2.3地形图制作
地形图制作主要包括高程点、等高线的生成以及地物绘制。利用地面点绘制等高线,最后再对其进行修饰,可以制作出高精度的数字高程模型DEM产品,针对需要绘制地物的区域,基于CAD软件导入点云,进行地物绘制,最终形成完整的1∶2000带状地形图。
4 精度分析
4.1 测深精度分析
为了检验多波束的测深精度,在实验区同步测了一些单波束水深数据进行对比,选取单波束测点坐标和高程作为真值,由于对比水深数据太多,现只展示部分结果,对比结果如表1。
根据表1可知:|ΔXmax|=6cm,|ΔYmax|=5.0cm,|ΔHmax|=19.4cm。通过计算X坐标较差中误差为3.4cm,Y坐标较差中误差为1.8cm,高程较差中误差为7.5cm。在本次试验中,X、Y坐标误差均在5cm以内,可以认定单波束测点和多波束测点为同一测点。由于实验过程中单波束测深和多波束测深存在时间差、水下地形自身存在冲刷、作业习惯、数据处理方法等因素,导致高程较差中误差略大,多波束测深基本满足河道测量规范,应用于水下测量是完全可行的。
为了检验测深数据整体吻合性,对多波束点云数据断面与单波束断面进行对比分析,如图2和图3所示。
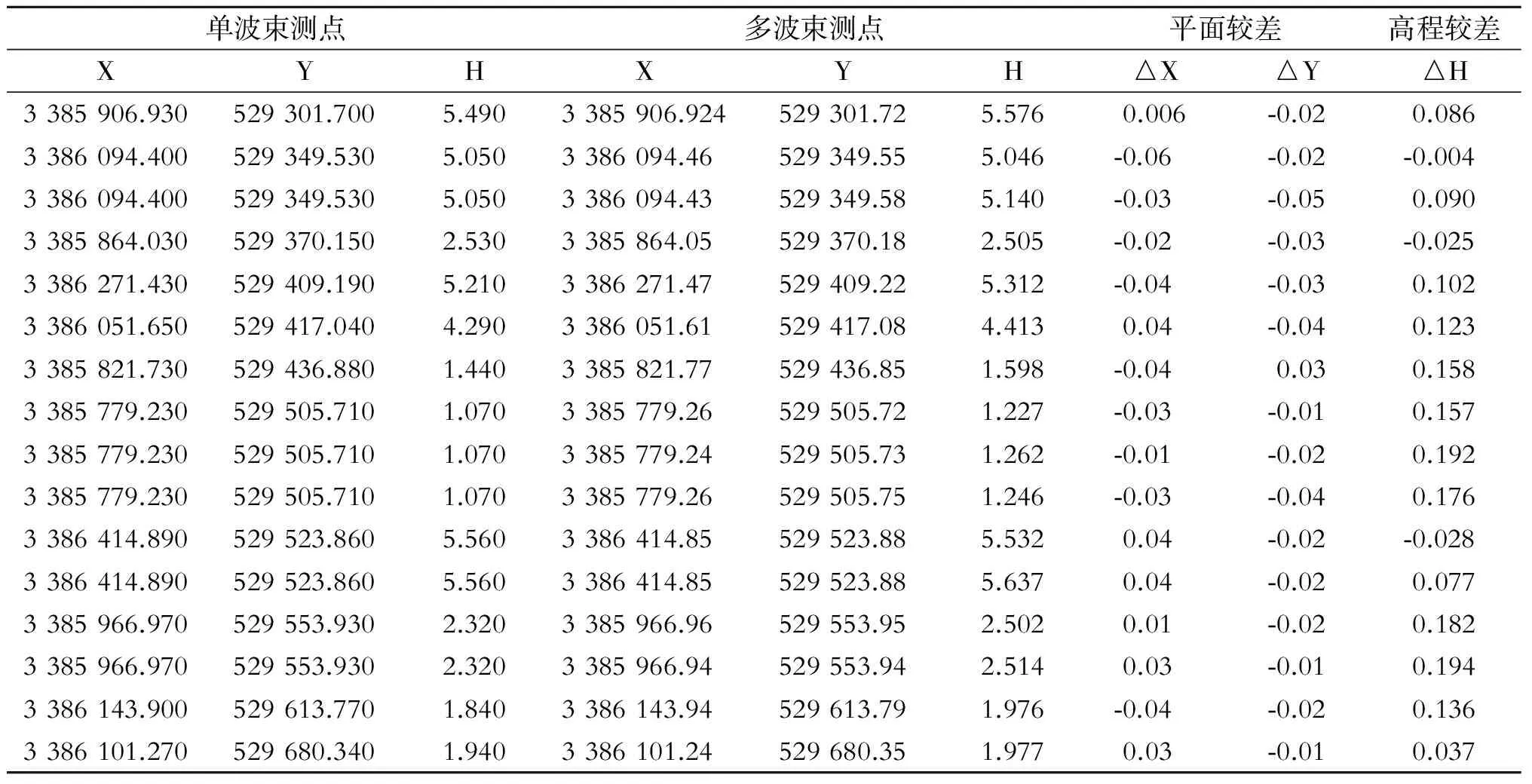
表1 单波束、多波束测点精度对比
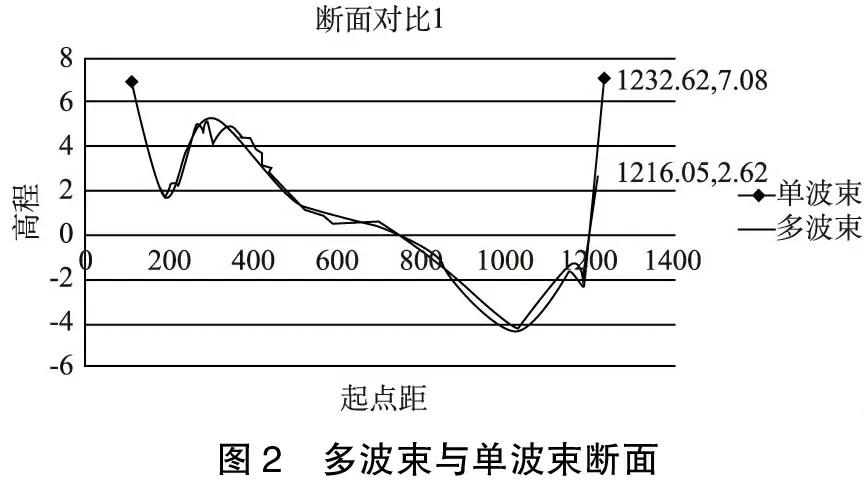
图2 多波束与单波束断面
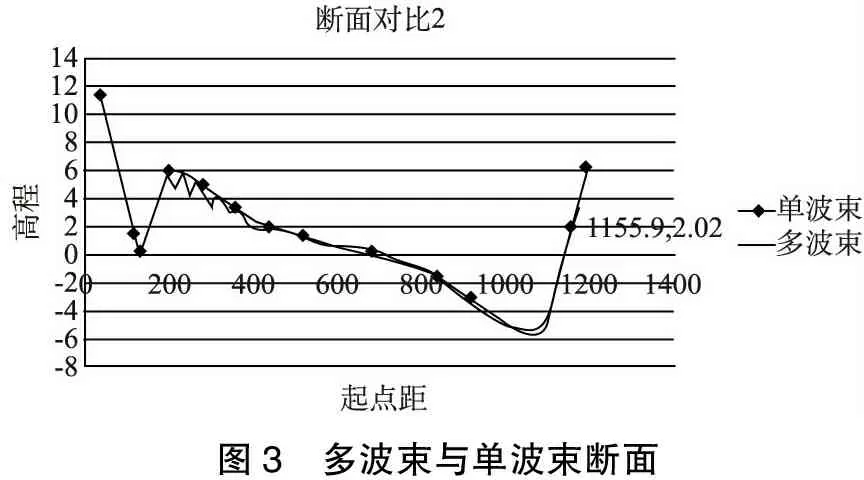
图3 多波束与单波束断面
从断面图可以看出,多波束断面和单波束断面基本一致,由于单波束测点数量有限,河底少许坑洼的地形未显示出来,而多波束测点密集,能够更加精确直观地反映出河底地形,这是多波束测深所具备的优势。
4.2 三维激光扫描精度
在进行船载三维激光扫描测量近岸地形的同时,用RTK对局部特征点进行了对比测量,选取二者同一位置的8个测点作为检测点,结果如表2所示。
在本次试验中,把RTK所测的点的坐标当做真值,从表2可以看出,ΔXmax=8.6cm,ΔYmax=4.0cm,ΔHmax=6.7cm,大部分测点平面差值和高程差值均在±5cm以内。计算三者的中误差分别为Mx=4.18cm,My=2.58cm,Mz=3.93cm,在地形图绘制时,根据河道测量规范,检测点的平面坐标中误差小于5cm,可以认定RTK测点和三维激光测点为同一测点,高程中误差小于5cm,能够达到绘制地形图的要求,满足一般测图的需要,应用于地形测量完全可行。
表2 三维激光扫描与RTK测量值对比
5 成果展示
5.1 点云成果

图4 三维激光扫描点云成果
图5 多波束点云成果
5.2 DEM和DLG成果
利用三维激光扫描与多波束测量的点云数据可以生成DEM,如图6所示,输出的三维坐标数据,可以制作出DLG成果,如图7所示。
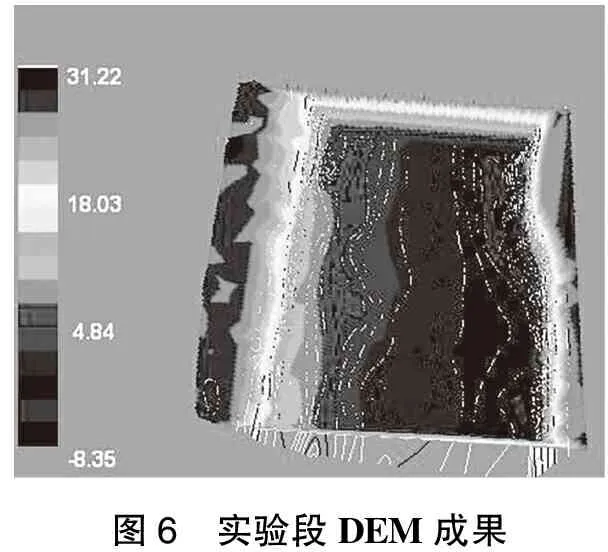
图6 实验段DEM成果
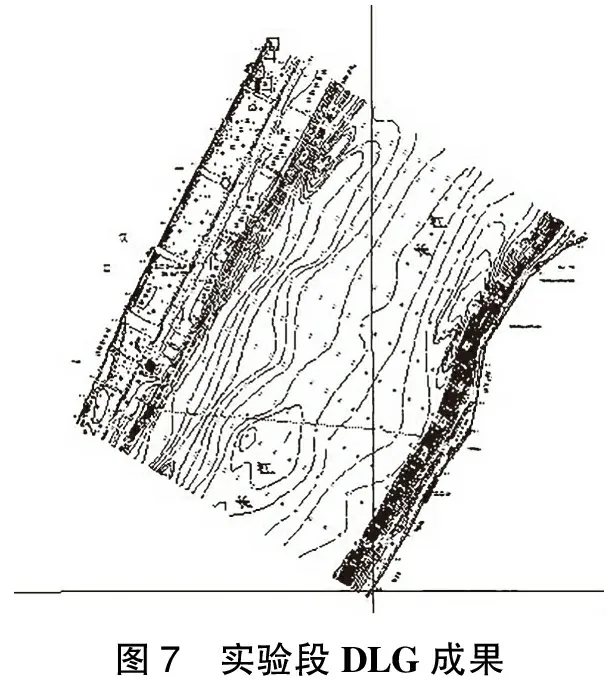
图7 实验段DLG成果
6 总 结
实验通过集合三维激光扫描设备和多波束测深设备,形成以测船为载体的水陆一体化扫测系统,在武汉河段进行了实验,对数据采集,点云处理、DEM、DLG数据制作进行了全面摸索,获得了客观全面的实测数据,对整个系统在长江中游河段扫测运用打下了坚实基础。系统主要有如下优点:
(1)速度快、精度高。水陆一体化扫测系统测量技术不同于传统测量技术的单点定位方式,全自动高精度测量,进而得到完整的、全面的、连续的、关联的全景点的三维坐标。这种方法采用非接触测量,速度快、精度高、真实还原,能反映出微观地形。
(2)成果更丰富。水陆一体化扫测系统外业采集完成后,能够在极短的时间内生成高精度的点云数据、DEM数据、DLG数据,成果种类更丰富。
(3)DLG生产更方便。使用高精度的点云数据,可快速进行矢量生产。
同时,也存在以下不足:
(1)激光器受植被的影响,对于河道植被覆盖率高的区域仍然获取不了有效数据。
(2)无合适的外业软件在一个界面里同时采集三维激光扫描数据和多波束测深数据,都是靠后期内业拼接完成。
(3)本次测量没有在三维激光扫描上同步加载全景摄像镜头,无法获取全景影像资料。
参考文献:
[1]刘经南,赵建虎.多波束测深系统的现状和发展趋势[J].海洋测绘,2002(5):3-6.
[2]李家彪.多波束勘测原理技术与方法[M].北京:海洋出版社,1999.
[3]杜雨生.多波束测深数据处理方法研究[D].南京:河海大学,2013,6.
[4]陆秀平.黄浦江航道多波束测深数据处理研究[J].海洋测绘,2011(3):4-7.
[5]史友峰,高西峰.三维激光扫描系统在地形测量中的应用[J].山西建筑,2007(1):65-70.
[6]李清泉.三维空间数据的实时提取,建模与可视化[M].武汉:武汉大学出版社,2003(12):1-2.
