基于Zigbee通信的室内定位系统
2018-04-09闫冬梅任丽莉王浩宇
闫冬梅, 任丽莉, 王浩宇
(1. 吉林大学 网络与教育技术中心, 长春130062; 2. 长春师范大学 网络中心, 长春 130032)
0 引 言
伴随科技的不断发展, 人们对定位技术提出的要求更为苛刻, 定位必须能达到较高的精度, 明确某个装置或个体的位置信息[1]。Zigbee通信技术作为一种新兴无线网络传输技术, 广泛应用于近距离无线连接与通信领域。它介于蓝牙技术与无线标记技术之间, 依据802.15.4协议标准。 Zigbee通信技术能体现多元化的特点, 其中比较具有代表性的包括功耗低, 稳定性强等。因此, 其在无线传感器组网通信中得到广泛应用, 通信效率高、 所需硬件少等优势也逐步得到了业界认可。在这种网络中, 位置信息对是非常关键的, 它是监测消息的核心要素[2]。通过定位算法即可明确所需的位置信息。
当前应用的算法包括两类: 第1类为距离无关算法, 比较具有代表性的是分布式定位算法ROCRSSI(Ring Overlapping based on Comparison of Received Signal Strength Indicator)等[3]; 第2类为基于距离的算法, 这种算法重点涵盖基于接收信号强度的技术等[4]。一般来说, 距离无关算法相关节点的硬件成本较低, 对硬件要求较初级, 比较符合大规模组网集成的定位需求, 但其定位相对的准确度及精度不是很高;基于距离的定位算法尽管效果比较优良, 但对硬件要求较为苛刻, 成本较高。而加权质心算法客观上融合了这两类算法, 它主要对节点存在一定差异的RSSI(Received Signal Strength Indicator)值进行分析, 以此优化准确度, 然而假如位置非常规, 则无法确定具体信息, 必然对结果的准确性形成负面影响[5]。笔者探讨了一类以Zigbee通信为核心的室内定位算法, 在目标环境内根据实际情况加装参考节点, 明确其信号强度, 从而对定位节点的位置进行估算。
1 Zigbee定位原理
RSSI简单来说是指节点获取的信号强度[6]。在应用该方法后, 可获取节点的信号, 并明确节点对应的信号强度, 结合发射信号分析实际的传播衰减, 通过有关模型对其进行转化, 从而明确距离, 最后通过定位算法展开高效的定位。这种技术对硬件不存在严苛的要求, 算法的复杂性较低, 在应用中能取得非常理想的定位效果, 一般具体表示为
RRSSI=-(10nlog10d+A)
(1)
其中A为特定位置的信号强度[7];n为信号传输常数, 客观上与信号的传输环境存在一定关联;d为发射节点的距离。
RSSI 对应距离曲线, 针对明确的应用场景可通过场景建模的方式, 确定射频参数A和信号传输常数n。此理论模型在实际应中需对参数进行测算以及优化, 才能适应真实的应用环境, 实现准确稳定定位。
2 3边定位算法
3边定位算法的原理是先运算3个已知半径和坐标圆心的圆的交点, 如图1所示。
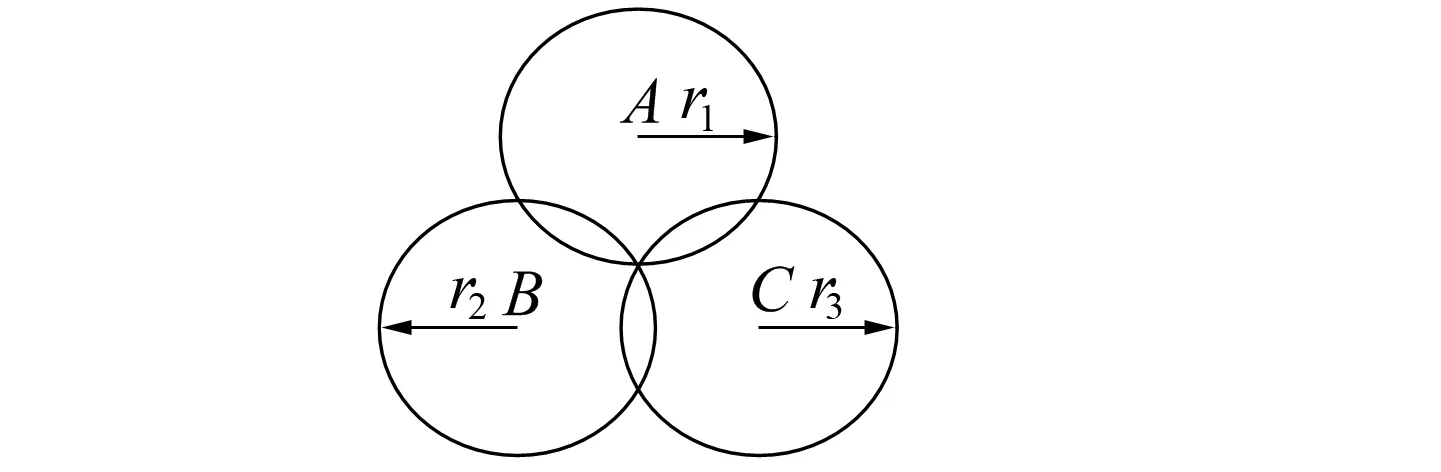
图1 三边定位原理图Fig.1 Trilateration positioning schematic
已知3个参考节点A、B、C的坐标分别为(x1,y1)、 (x2,y2)和(x3,y3), 它们到未知节点D(x,y)的距离分别为r1、r2、r3, 则可建立如下方程
(2)
由式(2)可得D点的坐标。
然而, 在具体测试的过程中, 因为存在一定的测距误差, 3个圆在绝大部分情况下都不能交于一点, 假定移动节点仅仅在指定的区域中活动, 那么可能出现的情况如图2所示。

a 3圆相交 b B、 C分别跟A相交 c 两圆相交一圆分离 d 3圆分离图2 三边定位算法中可能出现的4种情况Fig.2 Four possible cases in trilateral location algorithm
在具体操作的过程中, 第1步应先判断3个圆内存在多少相交点, 应用的方法是将所有圆的方程两两联立, 分析其是否存在解。
(3)
(4)
(5)
假如方程(3)存在解(x12,y12)、 (x21,y21), 分析谁和点(x3,y3)之间的距离更小, 将该点充当点D; 假如方程(4)在此时存在解(x13,y13)、 (x31,y31), 分析谁和点(x2,y2)之间的距离更小, 在这之后将该点充当点F; 假如式(5)存在解(x23,y23) 、 (x32,y32), 分析谁和点(x1,y1)之间的距离更小, 将该点充当点E, 此时3个点的重心即为定位的具体位置[8]。假如方程(3)不存在任何解, 则连接两个圆心, 两点的中心就是点D; 对于方程(4)、(5)无解的情况下, 可采用相同方式得到点E、F的坐标。因此, 不管其是否相交, 必然可得3个点, 然后进行后续运算。
3 Zigbee室内定位系统设计
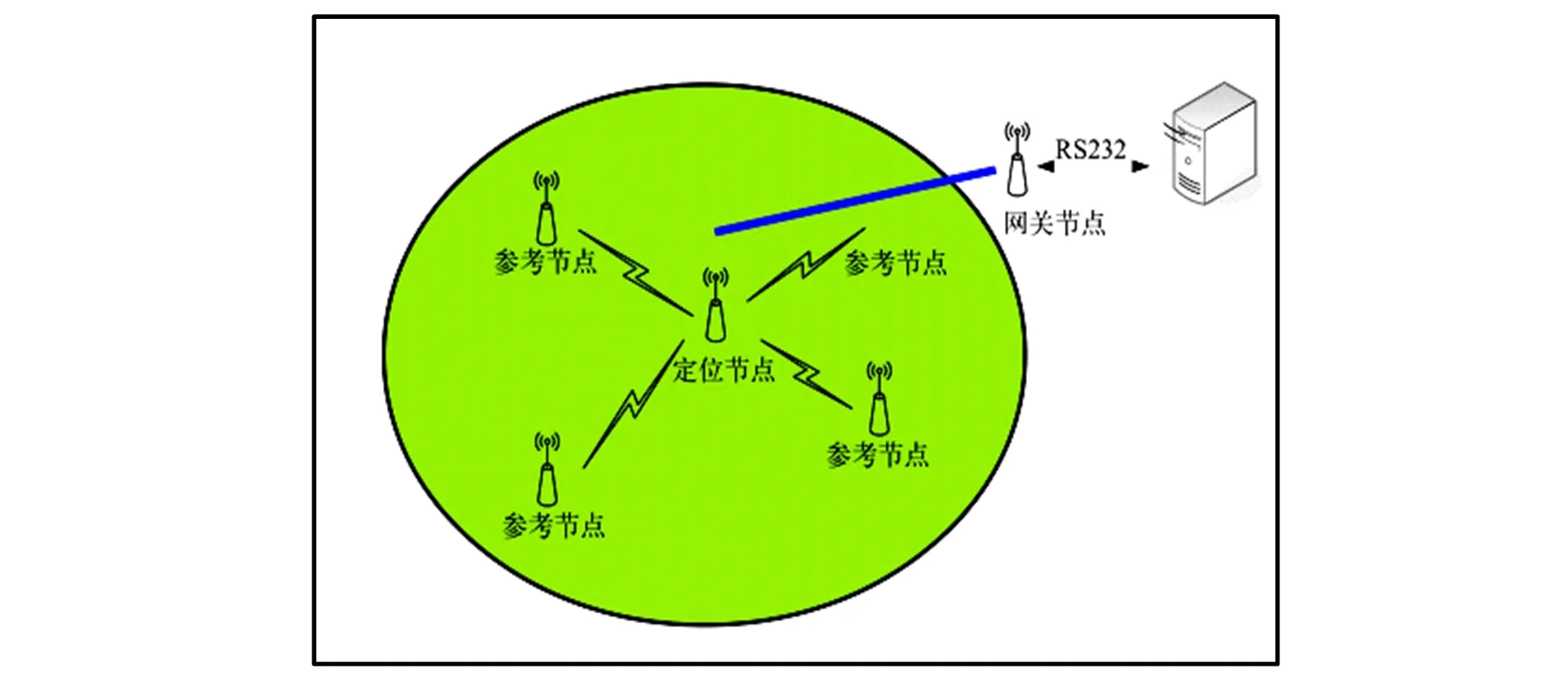
图3 室内定位系统网络结构图Fig.3 Network structure diagram of indoor positioning system
笔者探讨了一类改良的室内定位系统, 其很大程度上以Zigbee通信为核心, 其重点涵盖模块的参考节点和网关等。从通信网络的信号传输到计算机接收到信号强度的相关信息, 室内定位系统根据此信息测算并定位节点位置。其信号传输的原理如图3所示。
通信时的第1步是传输信号至参考节点, 在这之后该节点将获取的信号强度取平均值, 然后发回到定位节点, 定位节点再把收到的信息传输到网关节点, 接下来传输到上位机进行解算, 最后将位置信息输出。

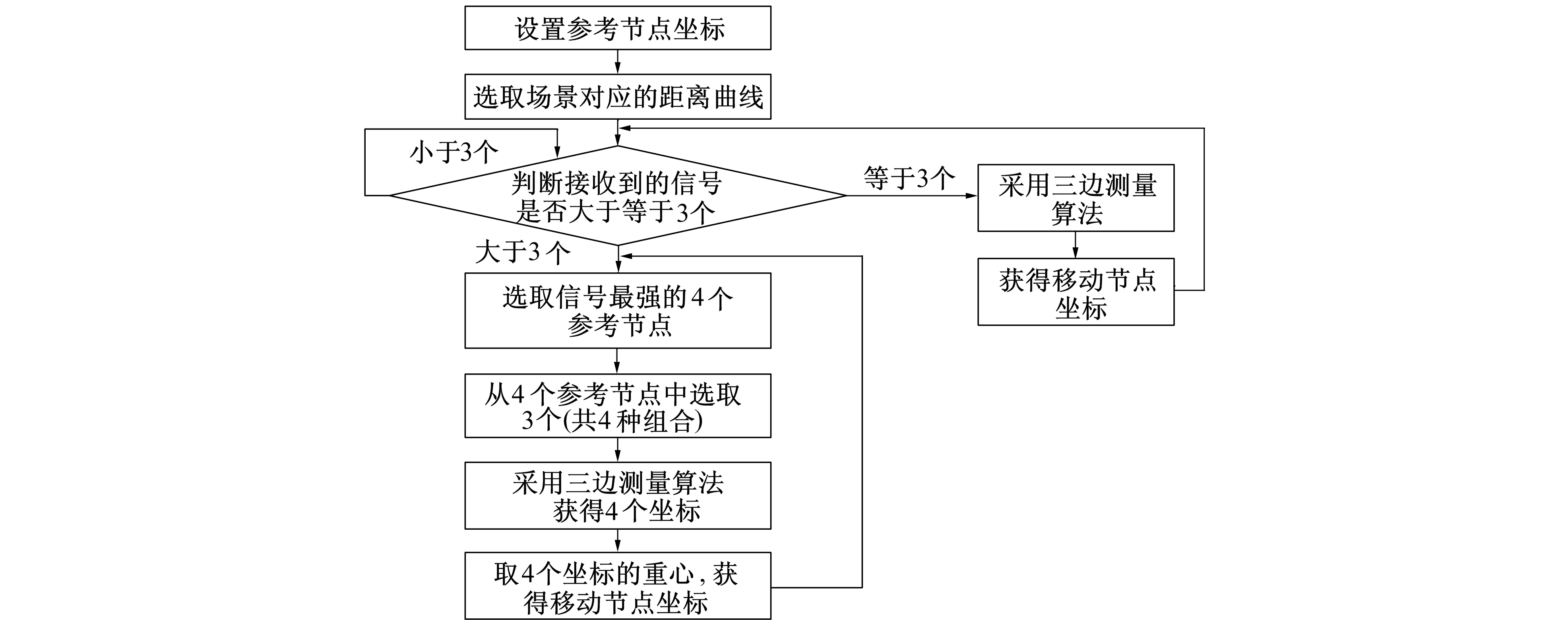
图4 室内定位系统测算流程Fig.4 Measuring flow of indoor positioning system
4 实验结果
通过环境测试后计算:A=234,n=6。除此之外, 实验定位引擎通过若干参考节点和定位节点展开测算, 上位机的整体情况如图5所示。具体参考节点坐标如表1所示。
选取的定位节点坐标先后为(2.5, 0.0)、(5.0, 2.5)、(2.5, 5.0)、(0.0, 2.5)、(2.5, 2.5)。对每个实验定位节点坐标进行10次实验取平均值和标准差, 然后进行误差分析, 具体实验数据如表2所示。
图5 实验上位机界面Fig.5 Experimental upper computer interface

参考节点A1A2A3A4坐标/m(5.0,0.0)(5.0,5.0)(0.0,5.0)(0.0,0.0)
表2实验定位数据
Tab.2Experimental positioning data (m)

X坐标真值Y坐标真值X坐标测量值Y坐标测量值X坐标标准差Y坐标标准差误差2.50.02.40.10.400.200.145.02.54.82.50.350.150.202.55.02.44.90.230.520.140.02.5-0.22.60.400.330.222.52.52.52.30.370.120.20
在表2中,X、Y坐标的真值和测量值分别代表定位节点的实际位置与定位估算位置,X、Y坐标的标准差代表10次实验测量值的标准差, 反应定位系统的稳定性, 误差的计算方法为
(5)
其中w为误差;X为横坐标测量值,X0为横坐标真值;Y为纵坐标测量值,Y0为纵坐标真值。
5 结 语
笔者主要探讨了一类室内定位系统, 该系统很大程度上基于RSSI测距模型, 并应用了3边定位算法。利用定位节点获取参考节点的信号强度进行定位。该系统组网能力强, 易于实现传感器网络, 且硬件成本相对较低, 满足市场需求。测试结果表明, 系统具有良好的稳定性和鲁棒性。与此同时, 定位误差在分米级别, 满足当前大多数室内定位需求。
参考文献:
[1]龚轩涛, 刘志勤, 岳江峰, 等. 基于射频识别技术的室内定位系统 [J]. 中国防伪报道, 2009, 3(3): 41-43.
GONG Xuantao, LIU Zhiqin,YUE Jiangfeng, et al. Indoor Positioning System Based on Radio Frequency Identification Technology [J]. China Anti-Counterfeiting Report, 2009, 3(3): 41-43.
[2]黄天祥. 无线传感器网络节点自定位技术研究 [D]. 南京: 南京航空航天大学自动化学院, 2008.
HUANG Tianxiang. Research on Self-Localization Algorithm of Wireless Sensor Network [D]. Nanjing: College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, 2008.
[3]李峙. 基于无需测距的无线传感器网络节点定位算法研究 [D]. 武汉: 华中师范大学物理学院, 2008.
LI Zhi. A Node Localization Algorithm Based on Range-Free in Wireless Sensor Networks [D]. Wuhan: College of Physics, Huazhong Normal University, 2008.
[4]王萍萍. 基于ZigBee的组合定位技术研究 [D]. 南京: 南京邮电大学通信与信息工程学院, 2013.
WANG Pingping. Combined Location Technology Research Based ZigBee [D]. Nanjing: School of Communication and Information Engineering, Nanjing University of Posts and Telecommunications, 2013.
[5]陆军. 无线传感器网络节点定位算法的研究 [D]. 杭州: 浙江工业大学信息工程学院, 2014.
LU Jun. Research on Node Localization Algorithms for Wireless Sensor Networks [D]. Hangzhou: School of Information Engineering, Zhejiang University of Technology, 2014.
[6]周佩光. 基于ZigBee技术室内定位系统的研究与实现 [D]. 杭州: 杭州电子科技大学电子信息学院, 2015.
ZHOU Peiguang. The Research and Implementation of Personnel Positioning System Based on ZigBee Technology [D]. Hangzhou: College of Electronics and Information, Hangzhou Dianzi University, 2015.
[7]ORTIZ C D C, JIMENEZ V M A, CELY CALLEJAS J D. Indoor Localization Prototype Using ZigBee [C]∥2012 IEEE 4th Colombian Workshop on Circuits and Systems (CWCAS). [S.l.]: IEEE, 2012: 978-985.
[8]赵大龙, 白凤山, 董思宇, 等. 一种基于卡尔曼和线性插值滤波的改进三角质心定位算法 [J]. 传感技术学报, 2015, 28(7): 1086-1090.
ZHAO Dalong, BAI Fengshan, DONG Siyu, et al. An Improved Triangle Centroid Location Algorithm Based on Kalman Filtering and Linear Interpolation [J]. Chinese Journal of Sensors and Actuators, 2015, 28(7): 1086-1090.
