高速时转向盘角阶跃工况下电动轮汽车EPS与DYC的协调控制方法
2018-04-08马金麟张厚忠
马金麟,吴 琦,张厚忠
(江苏大学 a.汽车与交通工程学院; b.汽车工程研究院, 江苏 镇江 212013)
安全是当今汽车发展的一大主题,随着人们对汽车操纵稳定性、行驶安全性要求的不断提高,装备电动助力转向(electric power steering,EPS)与直接横摆力矩控制(direct yaw moment control,DYC)的电动轮汽车将越来越普及。当处于高速且转向角变化幅度大等极限工况下时,汽车可能处于失稳、侧滑、转向过多导致激转等危险情况[1],由于车轮附着力的下降,车辆的方向控制将变得非常困难。试验证明:在极限工况下,DYC系统的控制作用要比基于转向的稳定性控制系统更加可靠和有效[2-3]。驾驶员对车辆进行转向操作时就会对汽车操纵稳定性产生影响[4],特别是在高速时转向盘角阶跃工况等紧急情况下,需要加入稳定性控制。因此,利用电动轮汽车每个车轮的转矩独立可控、电机与轮胎响应一致等优点[5],针对高速转向工况,对EPS与DYC的协调控制研究具有较高的研究意义。
近年来,国内外对于高速转向工况下汽车操纵稳定性控制开展了一些研究,潘公宇等[6]通过对主动悬架系统与转向系统集成协调控制,对高速转向工况下汽车操纵稳定性和平顺性进行研究,仿真结果表明能有效地改善高速转向时汽车的操纵稳定性和平顺性。张荣芸等[7]以ESP和EPS为研究主体,为了避免EPS和ESP间的功能干扰与重叠,采用功能分配的方法对其进行协调控制,结果表明能明显改善高速转向下的汽车的操纵和侧向稳定性,但没有阐述制动力分配算法。王其东等[8]针对汽车纵向侧向动力学存在的耦合因素,提出一种基于汽车行驶安全边界的EPS与ESP协调控制策略,改善了汽车的行驶稳定性,却没有考虑转向系统对汽车操纵稳定性的影响。韩国的MANDO公司提出的Unified Chassis Control(简称UCC)系统中,通过ESP系统检测到的横摆角速度和轮缸压力反推出进行协调控制所需的横摆力矩,再换算到转向系统中,由EPS助力电机提供给驾驶员,辅助驾驶员进行相应的调整工作[9],但主要是针对分离系数路面制动工况。
综上所述,国内外学者对EPS与ESP的协调控制有一定研究,但研究中的控制策略大多基于分散控制结构,其协调控制效果有限;而且对于4轮毂电机驱动汽车(简称为电动轮汽车)的EPS与DYC协调控制研究则更是少之又少。因此,本文基于电动轮汽车,针对高速转向盘角阶跃工况,采用分层控制结构,对EPS与DYC进行协调控制研究。
1 系统模型的建立
1.1 电动轮汽车CarSim整车动力学模型
CarSim是一款用于车辆动力学仿真分析的专业软件,可快速预测和仿真汽车的操纵稳定性、制动性、平顺性、动力性和经济性,同时也被广泛应用于现代汽车控制系统的开发。本文利用CarSim软件建立电动轮汽车整车动力学模型。但是由于CarSim软件目前尚无电动汽车这一模块,因此本文根据电动轮汽车的特点对CarSim自带的整车模型进行相应修改,以获得所需的电动轮汽车整车动力学模型。其电动轮汽车的基本参数如表1所示。
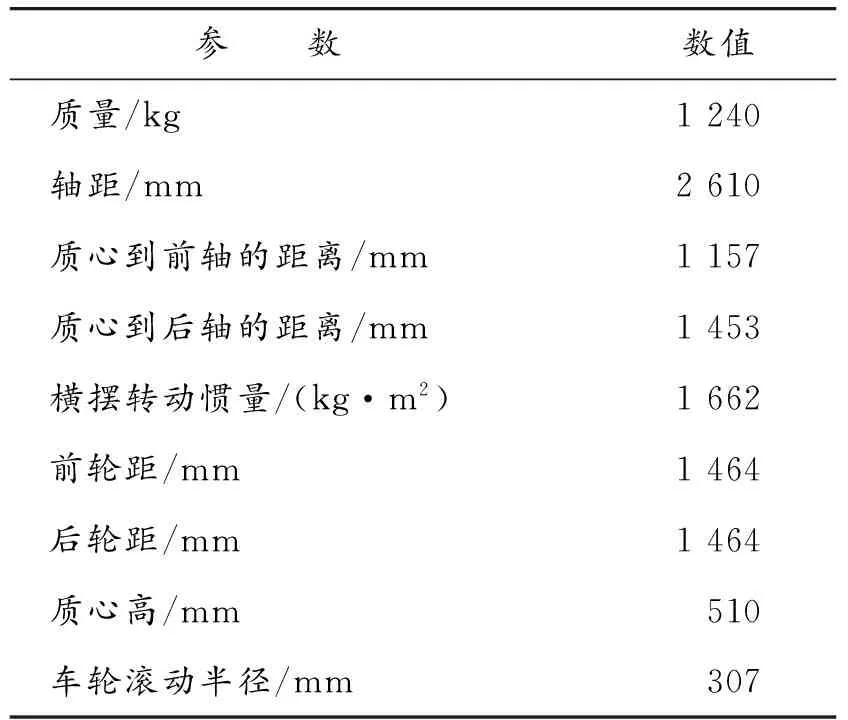
表1 电动轮汽车基本参数
电动轮汽车是由置于轮辋内的电机驱动的电动汽车,故可将轮毂电机和轮胎看做一个整体,都视为非簧载质量。因此,电动轮汽车单个轮胎的非簧载质量为40 kg,非簧载质量的转动惯量可利用式(1)计算。
Jz=mf·r2
(1)
其中:mf为非簧载质量;r为静载半径(其值可用轮胎滚动半径代替)。根据表1中参数,可以计算出非簧载质量的转动惯量Jz为3.77 kg·m2。
电动轮汽车的动力源于装在车轮内的轮毂电机,因此需要对CarSim中的车辆模型进行改进,将CarSim的传动系改为四驱模式,同时将差速器改为外部差速器以中断动力传递,将车辆传动系统的部件作为簧载质量,然后将电机的输出力矩直接加载至车轮,从而获得基于CarSim的电动轮汽车的传动系统仿真模型,如图1所示。
1.2 线性二自由度理想汽车模型
驾驶员操控汽车行驶时,希望车辆参数的响应随前轮转角的线性变化,线性二自由度模型(图2)是常用的汽车操纵动力学简化模型,该模型表征了汽车操纵稳定性与横摆角速度和质心侧偏角的关系,能够满足驾驶员的期望,因此常作为理想汽车模型[10]。
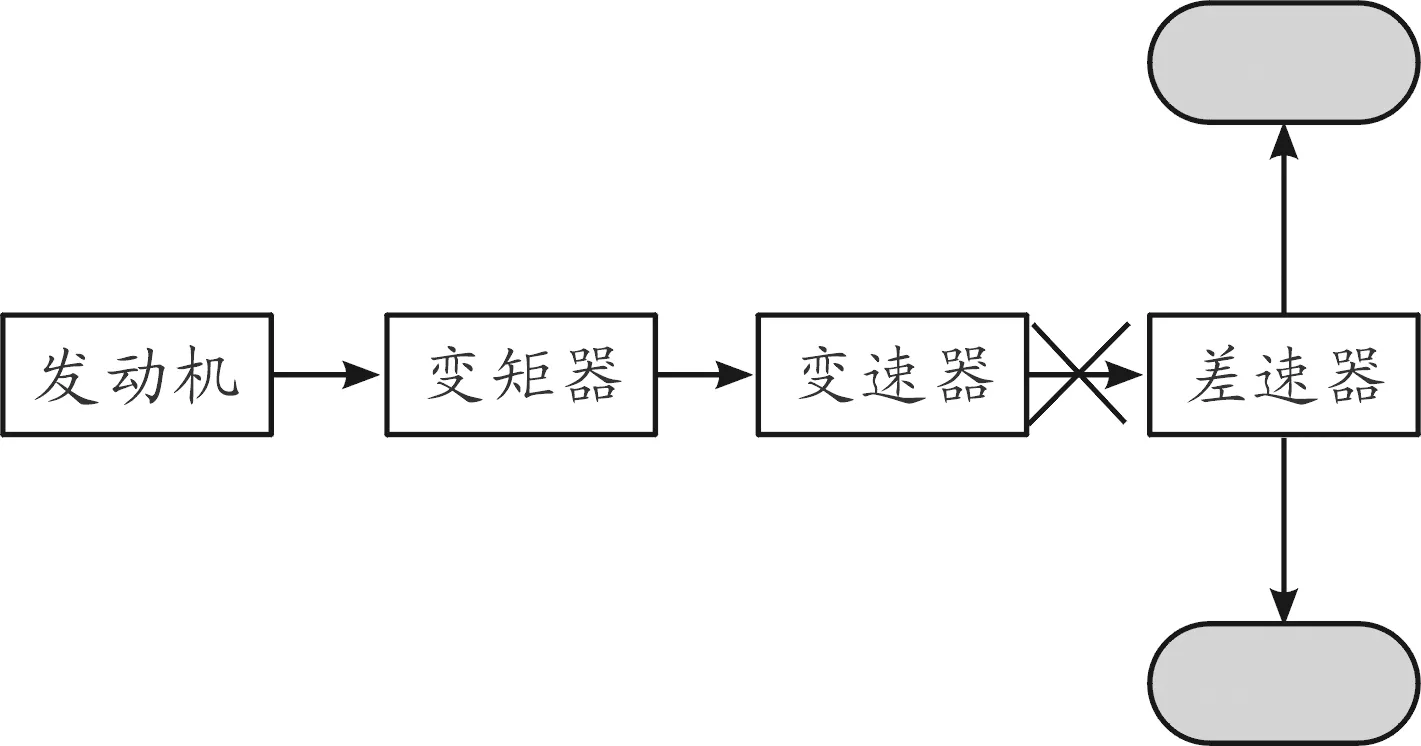
图1 电动轮汽车传动系统仿真模型
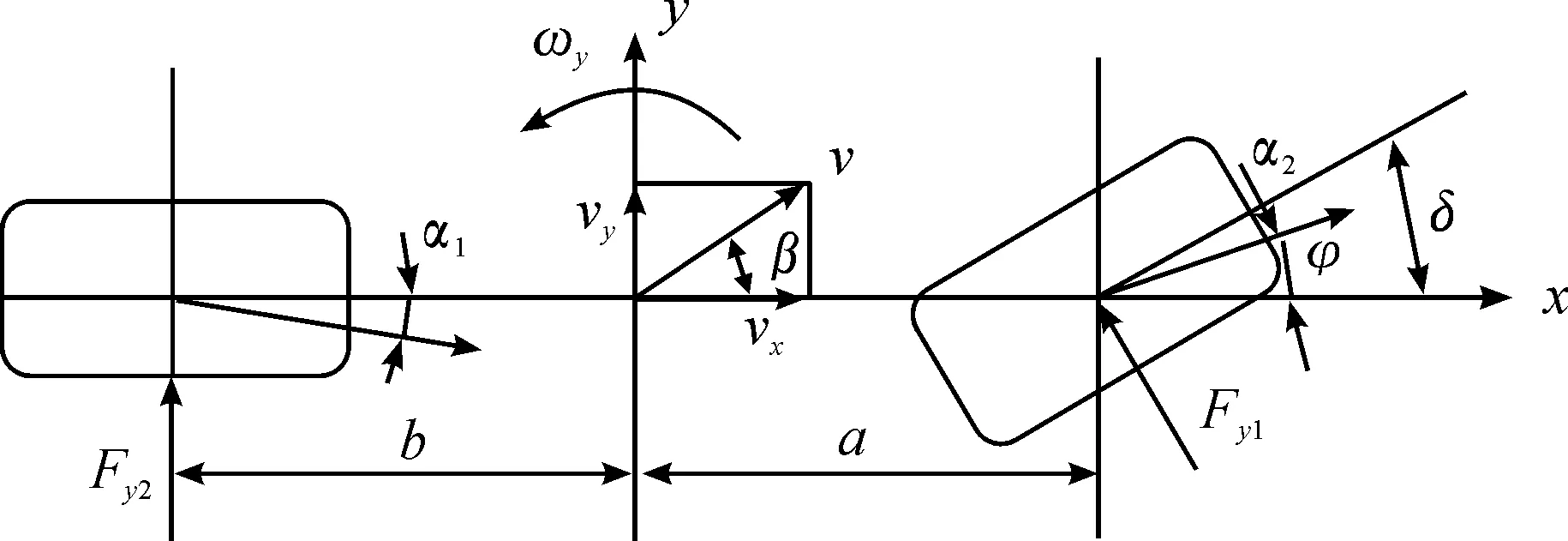
图2 二自由度汽车模型
(2)
(3)
1.3 EPS模型
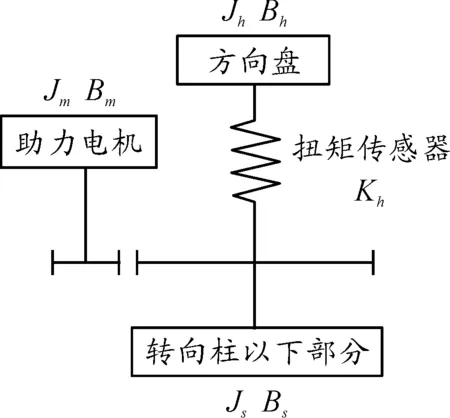
图3 转向系统动力学模型
本文以转向柱式EPS为研究对象,由方向盘、助力电机、转向柱及其以下部分组成,其动力学模型如图3所示。
可知EPS动力学方程为
[(Js+Jm·G2)·s2+(Bs+Bm·G)·s+Kh]·θ(s)
(4)
其中:Kh转向柱的扭杆刚度;θh为方向盘转角;Tm为电机输出力矩;G为电机到转向柱蜗轮蜗杆的传动比;Tf为转向机构固有摩擦;Js、Bs为转向柱外部分拟合为转向柱的转动惯量和阻尼;Jm、Bm为电机的转动惯量与阻尼。
2 EPS与DYC协调控制器设计
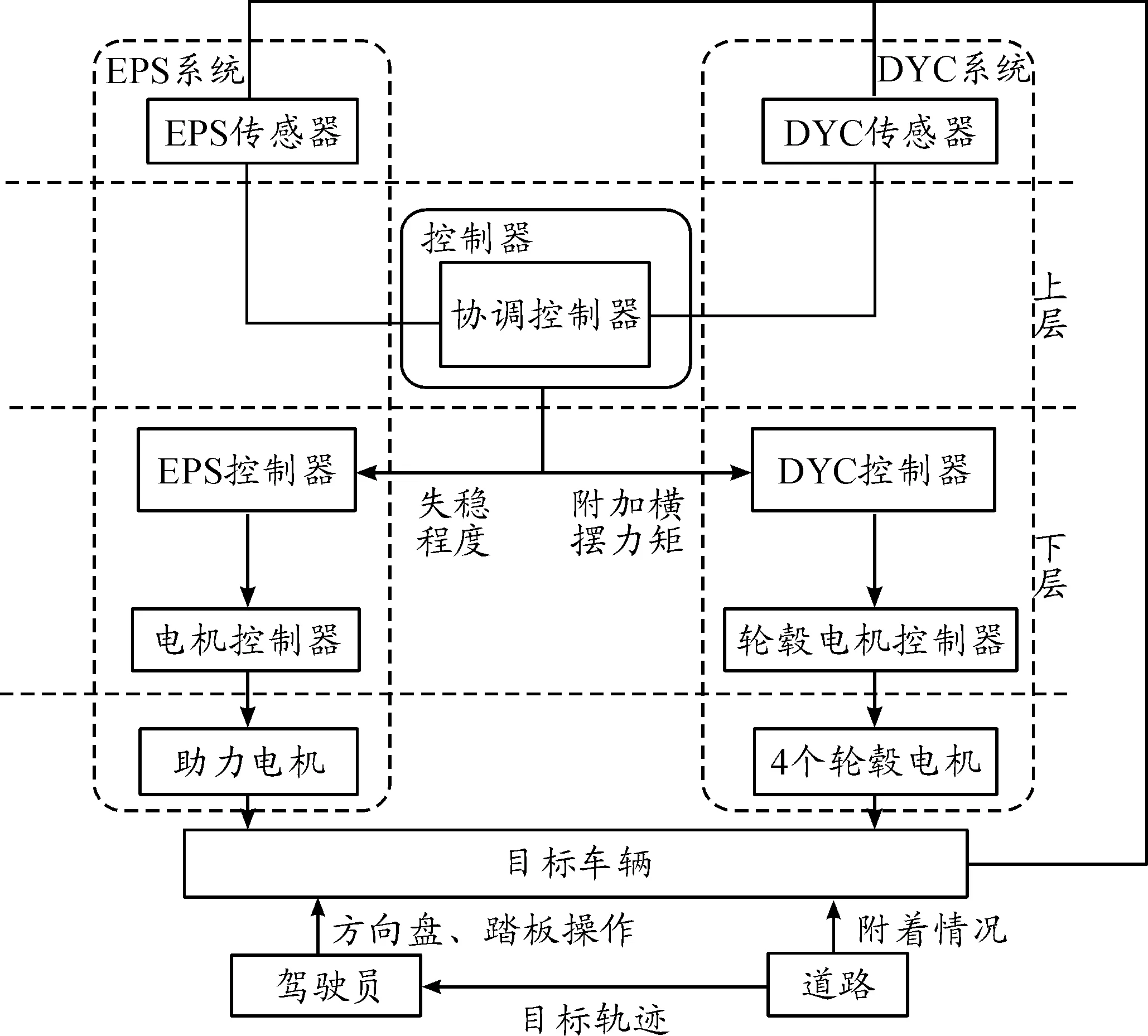
图4 协调控制框图
为了减小EPS与DYC所控制的汽车运动相互影响的程度,避免EPS与DYC协调控制过程中出现功能干扰和重叠,本文以现有研究为基础,基于电动汽车平台,以EPS、DYC控制系统为研究对象,从信息融合共享、子系统协调控制、单系统功能优化3个层面进行分析,采用分层控制理论,提出基于电动汽车EPS与DYC的协调控制方法,如图4所示。
图4中:上层为EPS与DYC协调控制器,通过EPS与DYC的传感器获取汽车行驶状态,包括车速ν、前轮转角δ、横摆角速度ωr、质心侧偏角β等,结合线性二自由度理想汽车模型,计算出期望横摆角速度与质心侧偏角的参考值ωrd、βd;根据特征参数判断汽车当前运动姿态,计算出汽车失稳程度e=ωrd-ωr及维持车辆稳定行驶所需附加横摆力矩ΔM,并将信息分别发送到下层2个子系统,子系统输出当前维持车辆行驶稳定的期望值。
2.1 上层协调控制器设计
2.1.1工况识别及状态分析
在上层协调控制器中的驾驶员操作及工况识别模块中,通过车速传感器检测得到车速ν,及通过方向盘转角传感器换算得到前轮转角δ,若车速ν≥νs、前轮转角δ≥δs(其中νs、δs均为控制策略中设定的门限值),则判别此时工况为高速大转向工况。
驾驶员在进行转向操作时,开始各个车轮侧偏角较小,侧偏力与侧偏角处于线性范围内,车辆响应与驾驶员期望一致,DYC系统处于无控制状态。随着驾驶员继续进行转向操作,轮胎的侧偏特性进入非线性区域,协调控制器通过线性二自由度理想汽车模型计算的期望横摆角速度与质心侧偏角与实际值相差逐渐增大,DYC系统进入控制模式,产生一个附加横摆力矩,使实际横摆角速度与质心侧偏角逼近期望值。随着方向盘转角的继续增加及DYC继续工作,电动汽车各个轮胎的轮胎力得到充分利用并达到饱和,若此时继续增加方向盘转角,考虑到路面附着极限,DYC控制下车辆的实际横摆角速度将不再增加。对于整个控制过程,EPS与DYC系统协调控制分析如表2所示。
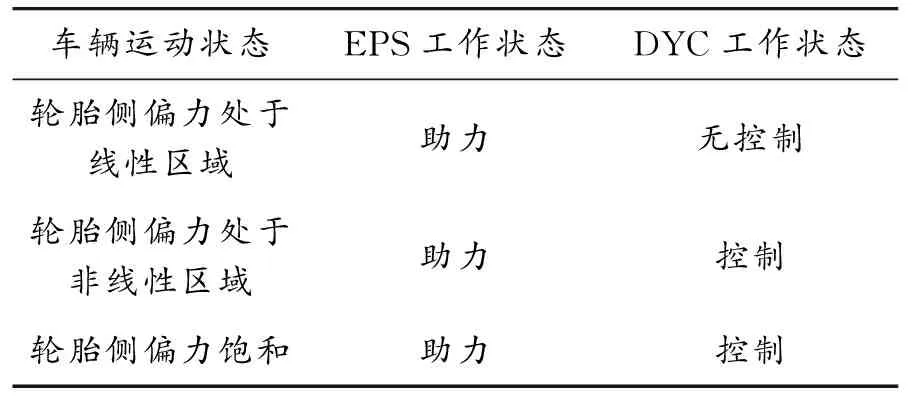
表2 高速大转向工况协调控制分析
基于以上分析,应尽量避免电动汽车各个车轮轮胎侧偏力处于饱和状态,当电动汽车轮胎侧偏力接近饱和状态时,应适量减小EPS提供的转向助力力矩,增加方向盘操作的转向难度,使驾驶员不易进行转向操作。
2.1.2驾驶员操作识别
从传感器信号中获取电动汽车的实际横摆角速度ωr,从线性二自由度理想汽车模型中得出期望横摆角速度ωrd,两者进行对比,并定义:
(5)
通过比较ε与dε的大小与方向,从而判断驾驶员是否为正常操作。当判别驾驶员为误操作时,指导EPS控制器对助力力矩进行调整。当ε与dε同号时,说明ε为增大趋势,期望横摆角速度与实际横摆角速度差不断扩大,此时DYC控制为制动转向状态,以缩小期望横摆角速度与实际横摆角速度的差异。因此,ε的绝对值增大主要是由于在高速大转向操作时驾驶员快速打方向盘的操作,导致期望横摆角速度迅速增大,此时驾驶员为过激操作,应减小EPS助力力矩,增加转向难度,减小驾驶员误操作程度。当ε与dε异号时,说明ε为减小趋势,实际横摆角速度能够很好地跟随期望横摆角速度,此时认为驾驶员正在进行正常转向,为正常操作。
2.1.3附加横摆力矩计算
为了使实际的横摆角速度和质心侧偏角很好地跟随横摆角速度和质心侧偏角的理想值,则滑模面方程为
s=μ(ωrd-ωr)+ξ(βd-βr)
(6)
其中:ωrd为期望横摆角速度;ωr为实际横摆角速度;βd为期望质心侧偏角;βr为实际质心侧偏角;μ、ξ为调节参数,其大小值决定横摆角速度和质心侧偏角产生附加横摆力矩的比例,可根据不同行驶工况进行调整。
根据式(6)可得
(7)
滑模控制一般由等效控制ueq和监督控制ur构成[11],其中ueq保证系统在滑模面上运动,ur使系统趋向于滑模面的运动,所以
u=ueq+ur
(8)
(9)
式中ueq=ΔM,则
(10)

(11)
将式(9)(10)代入式(6),经整理得
(12)
为了抑制滑模控制的抖振现象,本文设计的监督控制ur采用等速趋近律控制,则监督控制ur为:
ur=-k·sgn(s)
(13)
则:
(14)
式中μ、ξ、k均为可调参数。所以,采用等速控制和趋近律控制相结合的控制方法得到的基于横摆角速度与质心侧偏角的联合滑模变结构控制Matlab/Simulink仿真模型如图5所示,由此可以计算出所需附加横摆力矩的大小。
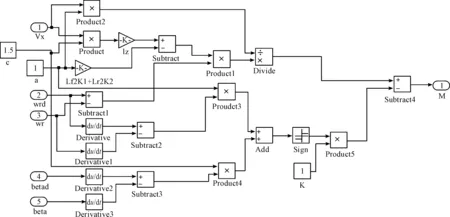
图5 附加横摆力矩大小计算模型
2.2 EPS控制算法优化
当汽车处于高速时大转向角阶跃工况下时,由于驾驶员的过激操作,导致实际横摆角速度与期望横摆角速度差异太大,汽车处于失稳状态。一方面,DYC系统处于控制模式,协调电动汽车4个轮胎的纵向力分配,产生一个附加横摆力矩,维持车辆稳定;另一方面,协调控制器通过所需附加横摆力矩大小修正EPS助力力矩,由EPS助力电机辅助驾驶员进行相应调整,提高电动汽车的行驶安全性,其控制策略如图6所示。
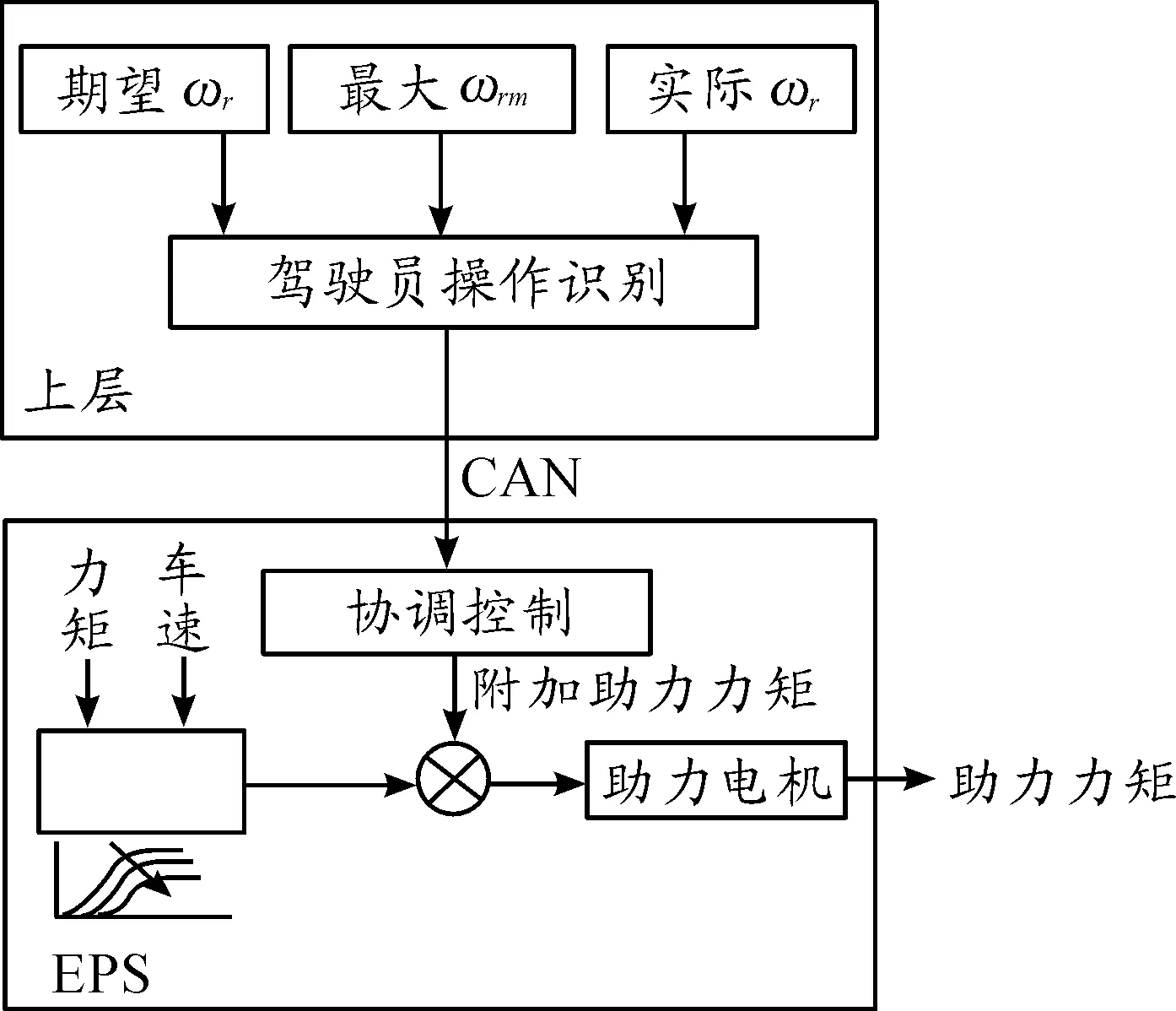
图6 EPS控制优化策略
在上层,协调控制器通过CAN连接传递信息给下层EPS,修正EPS助力电机提供的转向助力矩,辅助驾驶员方向盘操作,削弱因驾驶员打方向盘过激和过度导致电动汽车处于严重失稳状态。根据本文对驾驶员操作的识别,针对高速时大转向角阶跃工况,协调控制命令制定时可以基于公式形式,协调控制的权重系数K可用如下函数表示:
(15)
式中:ωrd为期望横摆角速度;ωrMax为基于路面附着极限最大横摆角速度;K1、K2为协调控制门限值,令K1=0.7,K2=1。采用上述方法可得修正后的EPS助力力矩TE=K·Te(Te为EPS修订前助力力矩)。当判定驾驶员操作为误操作时,权重系数K=0,此时EPS将不提供助力力矩,从而避免车高速时大转向角阶跃车辆行驶安全性及操纵稳定性的进一步恶化。
2.3 DYC控制器设计
通过上层协调控制器可以得出维持车辆稳定行驶所需的附加横摆力矩,将所需附加横摆角力矩下传至下层DYC控制器,通过DYC控制器及纵向力分配算法,将纵向力分配到各个轮毂电机,从而产生所需的附加横摆力矩以维持电动汽车的稳定行驶。
目前,电动轮汽车驱动力分配控制算法有3类:线性分配、动态分配、优化分配。线性分配算法包括直接分配法、链式递增法、系数PI调节法、伪逆法等。动态分配法是考虑轮毂电机和被控系统车辆响应频率接近时的一种分配算法,主要有基于模型预测的控制分配算法[12]。优化分配算法有最小二乘算法、广义逆法、线性规划法。本文采用轴载比例分配算法,即4轮驱动力矩按轴载比例进行分配,以前、后轮的轴载估计值分配比例控制各轴总的驱动力与横摆力矩。前、后轴载的估计值的确定方法为:
(16)
式中:Fzf、Fzr分别为前、后轴垂直载荷;hg为整车质心高度;ax为质心纵向加速度。
在采用轴载比例分配算法时,其各轮的纵向力在满足总纵向力和横摆力矩需求的同时还应满足下列条件:
(17)
由式(16)(17)可求出4个车轮纵向力的值:
(18)
最后,根据|Fxi|≤min(Fm,μFzi),i=1、2、3、4,得到优化后的4轮纵向力。
3 仿真与分析
本文利用CarSim软件建立电动轮汽车的整车动力学模型,利用Matlab/Simulink建立整车的EPS/DYC协调控制模型,将两模型联合后通过联合仿真对高速大转向下电动轮汽车EPS与DYC的协调控制方法进行验证。仿真工况如下:初始车速设为100 km/h,路面附着系数设为0.7,方向盘阶跃输入如图7所示,滑模变结构控制器的3个调节参数μ、ξ、k经调试后分别设为50、20、11。仿真结果如图8~11所示。
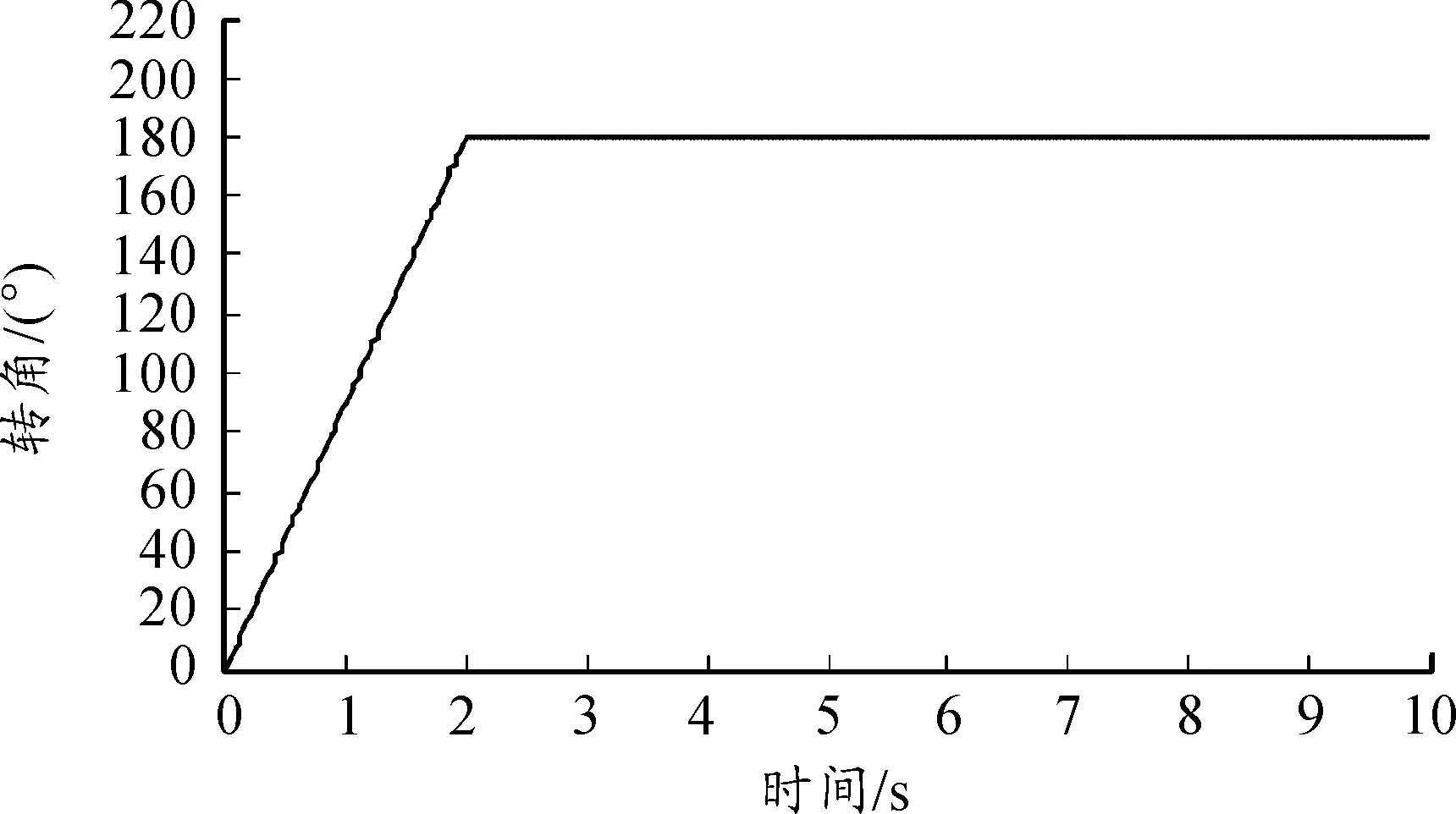
图7 方向盘角阶跃输入

图9 协调权重系数
图8为前轮转向角曲线。由图8可见:无协调控制的电动汽车在高速大转向工况下,其前轮转角保持快速上升并在2 s左右达到最大值,之后维持大转向角不变;协调控制下的电动汽车前轮转角较于EPS单独控制要小,说明提出的EPS控制优化设计能有效消弱驾驶员高速大转向时对方向盘的快速转向能力。图9为协调权重系数曲线,由图9可知:由于驾驶员对方向盘的过激操作,使协调权重系数K快速减小,在1.4~3.5 s之间保持在低数值状态,此时EPS提供少量助力或不提供助力,增加驾驶员的转向难度。
图10、11分别为高速时转向盘角阶跃工况下横摆角速度和侧向加速度的对比曲线。由图10可以看出:ESC控制及协调控制能很好地维持车辆的操纵稳定性,较ESC协调控制效果更好,说明将横摆角速度反馈给EPS系统,引入的协调权重系数能更好地改善汽车的操纵稳定性,有效减小高速时转向盘角阶跃工况下的横摆角速度的超调和振荡。从图11可以得出:协调控制下的侧向加速度较于无控制和ESC控制均要小,能明显减少电动汽车在高速时转向盘角阶跃工况下出现侧滑或侧翻的危险性。
4 结束语
为保证电动轮汽车在高速时大转向角阶跃工况下的操纵稳定性,本文提出一种基于分层监督控制的EPS与DYC协调控制策略,根据引入的协调权重系数函数对EPS转向助力矩进行适当修正,通过削弱驾驶员的转向能力,防止由于转向过多造成的危险情况的发生,可有效地减小高速时大转向盘角阶跃工况下的横摆角速度的超调和振荡。联合仿真结果表明:本文所提出的EPS与DYC协调控制策略,可显著提高电动轮汽车在高速时转向盘角阶跃工况下的操纵稳定性和侧向稳定性,其协调控制方法将为电动轮汽车底盘集成控制提供新思路。
参考文献:
[1]LI B,YU F.Design of a vehicle lateral stability control system via a fuzzy logic control approach[J].Proceedingsof the Institution of Mechanical Engineers.Part D:Journal of Automobile Engineers,2010,224(3):313-326.
[2]陈禹行.布式驱动电动汽车直接横摆力矩研究[D].长春:吉林大学,2013.
[3]杜尚谦.直接横摆力矩与四轮转向集成控制研究[D].上海:上海交通大学,2009.
[4]祁永宁,陈南,李普.四轮转向车辆的直接横摆力矩控制[J].东南大学学报(自然科学版),2004,34(4):451-454.
[5]MITCHELL W J,BORRONI-BIRD C E,BURNS L D.Reinventing the automobile:personal urban mobility for the 21st century[M].Cambridge:The MIT Press,2010.
[6]潘公宇,张明梅.高速转向工况下汽车操纵稳定性和平顺性研究[J].广西大学学报(自然科学版),2016,41(3):674-683.
[7]张荣芸,黄鹤,陈无畏,等.基于功能分配与多目标模糊决策的EPS和ESP协调控制[J].机械工程学报,2014,50(6):99-106.
[8]王其东,王金波,陈无畏,等.基于汽车行驶安全边界的EPS与ESP协调控制策略[J].机械工程学报,2016,52(6):99-107.
[9]YOON J,CHO W,YI K,et al.Unified chassis control for vehicle rollover prevention[J].Ifac Proceedings Volumes,2008,41(2):5682-5687.
[10] 余志生.汽车理论[M].5版.北京:机械工业出版社,2011.
[11] 张昌凡,何静.滑模变结构的智能控制理论与应用研究[M].北京:科学出版社,2005.
[12] 范晶晶,邹广才.基于 DYC 的四轮驱动电传动车辆动力学控制系统研究[J].车辆与动力技术,2009(1):1-6.
