电-气伺服阀实现恒压控制的分析与实验
2018-04-02赵堂春黄敦华
赵堂春, 杜 钧, 黄敦华
(北京电子科技职业学院机电工程学院, 北京 100176)
引言
随着工业自动化的发展,气动元件与电子元件的结合使控制回路的电子化得到迅速发展。电-气动伺服技术因具有价格低廉、结构简单、响应速度快、功率体积比高及污染小等优点,在自动化生产领域的应用越来越广泛。
1 电-气伺服系统原理
在很多工业应用中,由于被控压力与面积之间存在特有的力学关系,加上电-气伺服阀的电压给定值和输出压力之间存在线性比例关系,因此只需要一个开环控制系统就能调节出带有精度要求的输出变量——压力。利用电-气伺服阀实现恒压控制的开环系统如图1所示。在此开环控制系统中的压力控制阀采用的是力士乐的气动伺服阀,其原理是通过一个插头提供24 V的电源,模拟量电压给定值通过一个A/D转换器传动到内部的控制器上,再经过一个脉宽调节过程和V/I转换之后,控制器控制线圈的动作。气压输出口的实际压力值被转换成电压并被传送到内部的控制器,然后通过插头上的D/A转换器进行模拟量输出。

图1 开环控制系统图
2 恒压实验系统的建立与实现
实验模型建立在一个气动夹紧系统之上,通过两个单作用气缸分别对三种不同尺寸零件采用三种夹紧力(F1=50 N,F2=150 N,F3=250 N)进行夹紧和固定,为了不使零件产生变形,需要进行恒压控制实现夹紧和固定。
2.1 气动控制系统
气动控制系统主要由气源、气动三联件、电-气伺服阀、带模拟量输出信号的压力传感器、集成有测量系统和外部带弹簧的气缸、不带弹簧的单作用气缸组成,气动回路图如图2所示。
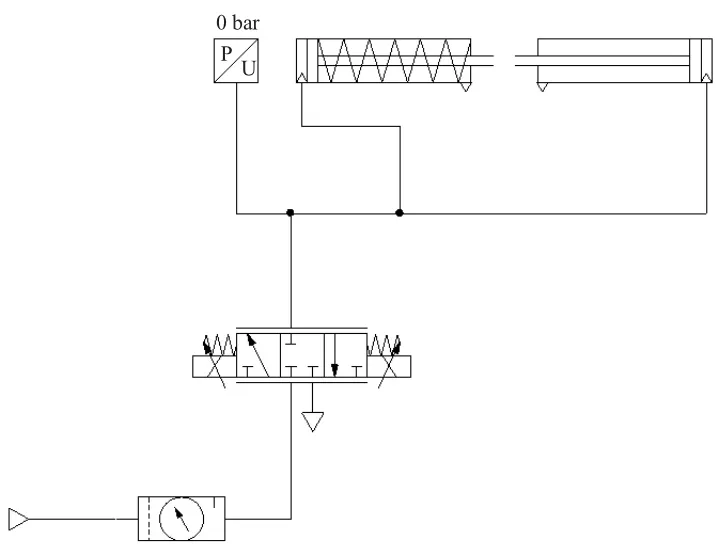
图2 气动回路图
2.2 电-气伺服阀给定值的计算
由选定的气缸参数得知气缸活塞的直径为25 mm,可以计算出作用面积A为4.91cm2,根据公式F=PA分别算出对应三种夹紧力的压力,然后根据伺服阀的压力/电压特性曲线得出电-气伺服阀的电压给定值,如表1所示。
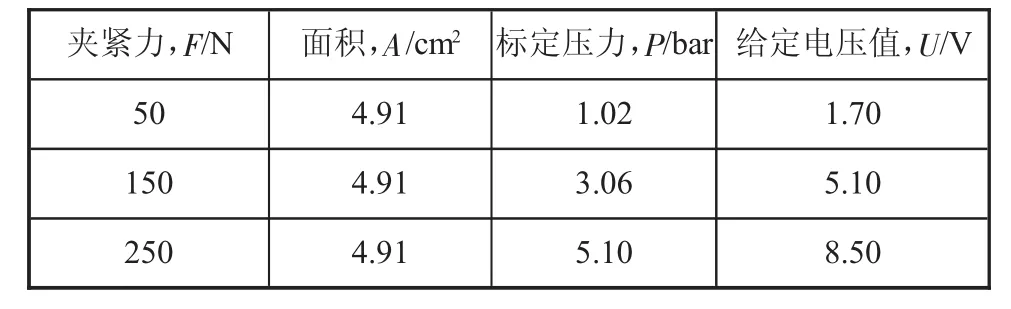
表1 伺服阀的压力及电压给定值表
为了计算夹紧时间,还需要计算系统容积,在计算过程可忽略伺服阀的容积,只对两个气缸以及三根气管的容积进行计算,按照三根气管长度均为30 cm,从而计算得出整个系统的容积(活塞杆伸出到头)为0.101 L。根据伺服阀的压力-流量特性曲线(如图3所示)可以得出在不同供气压力下的流量S。
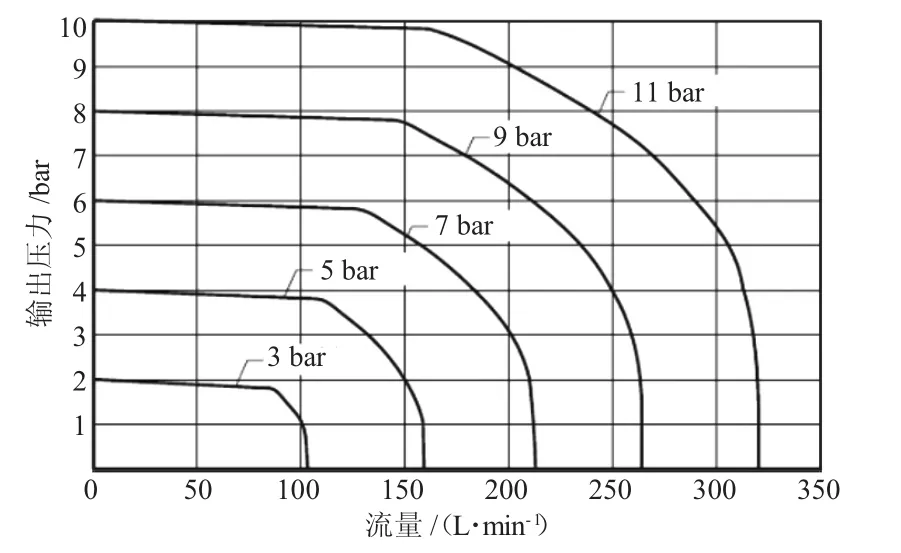
图3 伺服阀压力-流量特性曲线
根据波义耳-马略特定律可以得出系统在初始压力下(假设为1bar)的系统初始容积V,然后根据公式(1)得出气缸的夹紧时间T,如表2所示。

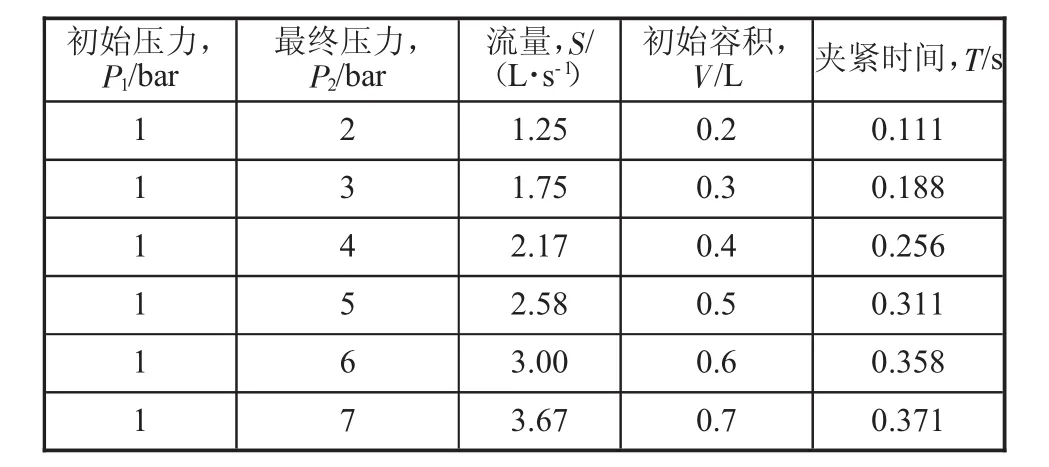
表2 气缸夹紧时间
2.3 系统的实现
由表1可知一个50 N夹紧力相当于一个1.02 bar的超压,对应给定值电压为1.7 V,依次将电压设定值设为1.7 V、5.1 V、8.5 V,启动系统跟踪功能,得出对压力/给定值阶跃函数的系统响应图如图4所示。由图4可以看出中间曲线为实际值近似于给定值,没有明显的超调,满足伺服控制系统的要求。
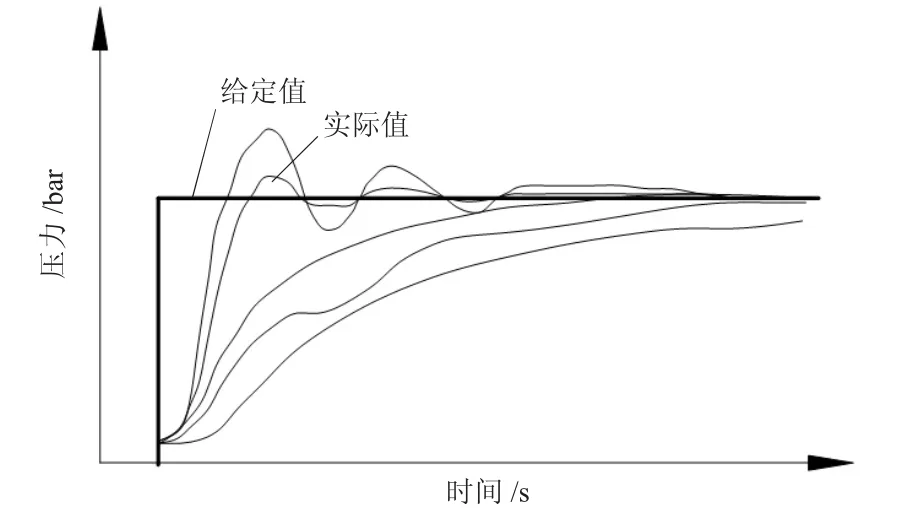
图4 压力给定值阶跃函数的系统响应
3 结语
该电-气伺服系统成功实现了恒压控制,同时也实现了压力的可重复性和稳定性。在实际操作中发现在给定值变化的开始和实际值变化的开始之间大约有20 ms的时间间隔,这种延迟是由于伺服阀内部的控制器造成的,正是这种控制特性决定了控制阀不能被立即完全打开,虽然有延迟,但实际系统的性能仍然接近于计算的系统性能。值得注意的是,由于松开零件过程中不需要克服气体的可压缩性和气缸的动摩擦,所以松开时间和夹紧时间并不相同。
