矿井提升机异步电动机矢量控制系统的设计
2018-04-02李建红
李建红
(西山煤电东曲煤矿, 山西 太原 030200)
引言
结合相关理论知识,以矿井提升机的工作特性为切入点,进行详细分析,建立相应的矢量控制数学模型,对矢量控制原理进行解读,优化拖动调速方案和调节器设计方案。同时,为了提高研究的实用性,进行具体案例分析,将理论与实践结合在一起,使其相互印证。案例选择为660 V等级的提升机,对于提升循环运行情况的仿真使用MATLAB模式。
1 异步电动机按转子磁通定向的矢量控制设计
1.1 异步电动机交—直—交矢量控制系统设计
在异步电动机交—直—交矢量控制系统主电路设计当中,整流器部分使用PWM形式的整流器,对于逆变器INU的接法要根据实际情况,使用三相桥模式保证系统的安全可靠。从结构的角度分析,该结构属于两电平拓扑结构;从适用范围的角度分析,适用于一些容量较小的场合。本文所选取660 V电压等级的井下防爆绞车和矸石山绞车就是其主要的应用对象,对于变频器的输出电压设置要符合使用要求,将其设置为660 V,因此,桥臂开关器件设置过程中要保持与其他方面设计的协调性,使用1 700 V的IGBT,使用霍尔电流传感器进行变频器三相输出电流的检测。如果在实际工作中,主井和副井提升机容量较大,那么则需对结构进行调整,使用三电平的双PWM拓扑结构[1],如图1所示。
1.2 异步电动机矢量控制设计
关于异步电动机矢量控制的矢量图设置过程(如图2所示),磁链轴M的位置要精准且满足需求,通常情况下将其设置在转子磁链ψr的轴线位置之上,用is来表示定子电流合成的空间矢量,主要包括isa、isb、isc三相定子电流,每相定子电流都具有其各自的特性,要对其进行针对性的分析和设计,保证其合理性。其中,对于三相定子电流的转速设计,要具有统一性,满足以同步速度ωs旋转,并将d轴设置为转子轴,旋转速度为ωr。在坐标系方面,主要以静止两相坐标系为主,将其设置为αβ,在这一环节中,α轴要与三相定子绕组的a轴保持重合,还要保证转子相对于定子绕组a轴的位置角度数合理,通常使用d轴与α轴的夹角λ来表示,而M轴与d轴之间的夹角属于负载角,用θ来表示,这样就可以得出磁链轴M相对于定子绕组a轴的空间位置角计算公式为 φs=λ+θ。
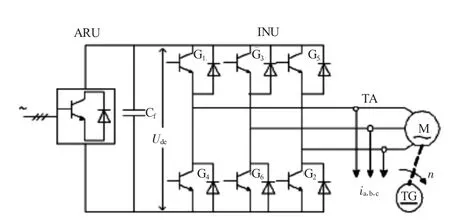
图1 异步电动机交—直—交矢量控制系统主电路图

图2 异步电动机矢量控制的矢量图
2 矢量控制系统的调节器设计
2.1 定子电流调节器ACR的设计
在具体设计过程中,可以从定子电流环的动态结构和转换成单位反馈系统两方面对其进行分析。其中,ACR的输出电压可以用U*A来表示,在PWM的作用下,会进行一定的调制,然后使用逆变器输出,可以得到定子电压UA,从U*A到UA的整个转换过程需要一定的处理程序,因此,产生一定的时滞。通过相关实验,整个采样周期时间不超过0.20 ms,影响较小,可以忽略。这样一来,就可以将转换环节视为放大环节,相关的放大倍数用KA表示,影响放大倍数的因素主要是调制系数。在电流检测过程中,进行高频分量的消除所采取的方法是滤波法,要保证滤波时间常数设置合理。通常情况下,滤波时间常数为开关器件开关周期的2倍,以0.20 ms为开关周期,滤波时间常数则为0.40 ms[2]。在异步电动机的稳态等效电路中,分析定子电流的影响时,可以假定转子电势为不变量,由此产生的电流模型矢量控制系统图如图3所示。

图3 电流模型矢量控制系统图
2.2 磁链调节器的设计
在设计磁链调节器过程中要合理确定积分系数和比例系数,分别用τψ、Kψ来表示,由于励磁分量到电机转子磁链间的幅值是一个1阶惯性环节,且这一过程属于大惯性环节,所以磁链调节器设计与电流调节器设计相同[3],如图4所示。

图4 磁链环动态结构图
2.3 转速调节器的设计
在正向通道中,需要除以通过电流模型检测到的电机转子磁链幅值,还要乘以通过电流模型检测道德电机转子磁链幅值,对于两者间产生的差值只能作为磁链的检测惯性和电流反馈系数,如图5所示。在这一过程中,产生的惯性时间相对较短,可以进行忽略,如果将磁链的电流反馈系数设置为1,那么就不需要考虑电机转子磁链幅值的影响[4]。
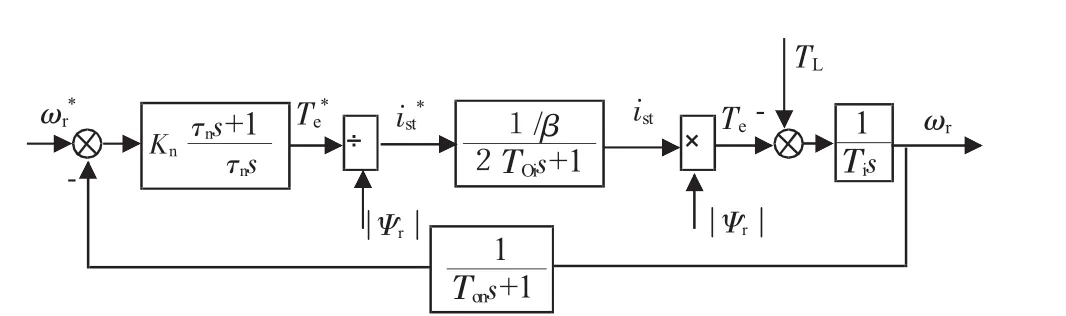
图5 速度环动态结构图
3 实例分析及系统仿真
首先对提升机电力拖动特点进行总结,具体包括以下几点:其一,位势负载;其二往复运转;其三,对提升机的加速度、减速度和导数进行合理设置[5]。
然后使用MATLAB的相关工具进行矢量控制系统仿真模型的构建,在速度给定过程中,依据提升循环的理想速度曲线进行设计,分别对额定负载和轻载两种情况进行仿真模型建立。此外,还要判断电压和电流波形的准确性。在仿真时,最大转速为102 rad/s,先设置磁链,时间间隔为0.5 s,接下来进行额定负载下的提升循环仿真,加速时间为5 s,等速时间为0.5 s没减速时间为0.5s,结果是等速阶段的转速为102rad/s,爬行速度为3 rad/s,转矩与额定转矩基本相同,电压和电流波形正常,证明该设计的合理性。
4 结语
对于矿井提升机异步电动机的矢量控制系统设计,要根据实际情况,结合有关的理论,保证其参数的准确性。本文的案例研究就证明了设计方案的准确性。
[1]吴燕翔,张朝君,刘雨青,等.基于矿井提升机模糊PID矢量控制系统的设计仿真[J].煤炭工程,2013,45(8):124-126.
[2]张贞艳,左瑞.矿井提升机的无速度传感器矢量控制[J].机电产品开发与创新,2014,27(6):142-143.
[3]李瑾.矿井提升机双馈转子变频调速系统设计[J].煤矿机械,2016,37(1):35-37.
[4]徐杰,陈磊,王运强.基于矢量控制的矿井提升机研究[J].山东工业技术,2015,6(3):94.
[5]曹建全,黄明.混合PS0算法优化异步电机矢量控制参数在矿井提升机的应用[J].煤矿机械,2012,15(4):206-208.
