标准包络环面蜗杆副通用接触线方程及数值求解
2018-04-02李昌冉陈旭锋
吴 彬,张 璐,李昌冉,李 雄,陈旭锋
(长安大学,陕西 西安710064)
0 引言
环面蜗杆传动相对于圆柱蜗杆传动具有啮合齿数多,承载能力大的优点[1]。我国生产的二次包络环面蜗杆主要有平面二次包络环面蜗杆、锥面二次包络环面蜗杆[2],其广泛应用于机械、化工、冶金等领域[3]。由于包络环面蜗杆副齿廓曲面的复杂性,对其进行齿面方程的求解也很复杂,国内外众多学者对其进行了研究,代表有胡来瑢[4]、董学朱[5]、L.V.Mohan[6]等,都针对性的对环面蜗杆副接触线方程进行了推导,但很少有对二次包络环面蜗杆副通用接触线方程进行推导。本文推导了标准二次包络环面蜗杆副的通用接触线方程,最后以平面二次包络环面蜗杆为例对接触线方程的求解进行了研究。
1 标准二次包络环面蜗杆副通用接触线方程
1.1 坐标系设置
根据蜗杆毛坯与工具齿轮的相对运动关系,为了表达和计算方便,建立如图1所示的蜗杆表面坐标系。

图1 第一次包络坐标系
图中,C为蜗杆副中心距;S0(i0j0k0)为刀座(蜗轮)静坐标;Sw(iwjwkw)为蜗杆静坐标;S1(i1j1k1)和S2(i2j2k2)分别是蜗轮和蜗杆的动坐标系;φ1,φ2为蜗轮、蜗杆在定坐标系转角。
1.2 第一次包络蜗杆齿面上通用接触线方程
S0(i0j0k0)和Sw(iwjwkw)分别是与机架固定连接的刀座和蜗杆上的静坐标,S1(i1j1k1)和S2(i2j2k2)分别是与刀座和蜗杆固接的动坐标系。第一次包络形成蜗杆齿面,成型面上啮合点p在S1中的位置表达式:

啮合点处单位法向量三个分量可表示为:

啮合点处的相对运动速度可由下式求得:

式中 w(12)=w(1)-w(2)=-sinφ1i1-cosφ1j1+i12k1
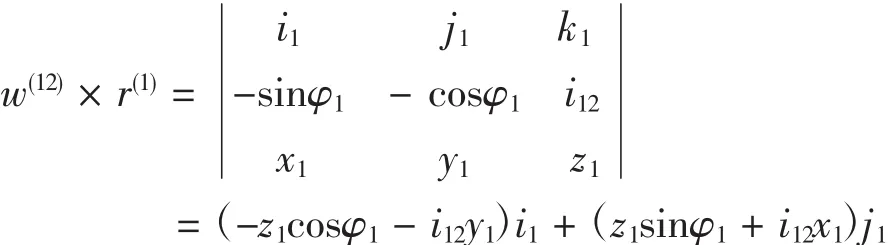

将(4)、(5)代入(3)整理而得

根据共轭理论可知第一次包络啮合函数可表示为:

把(2)、(6)代入(7)整理而得第一次包络通用啮合函数:

其中

通过坐标变换,将动坐标系S1中p1转换到蜗杆动坐标系S2中p2得
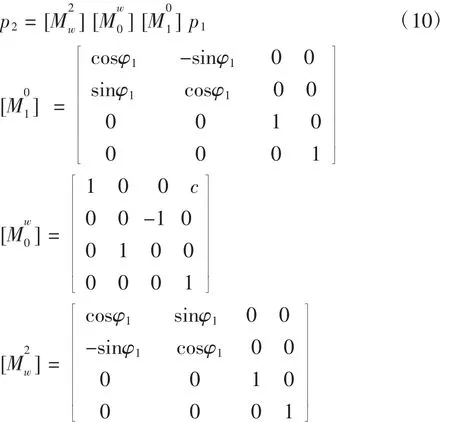
联立(1)、(2)、(8)、(9)得到第一次包络蜗杆齿面通用接触线方程。
1.3 第二次包络蜗轮通用接触线方程
如图2是用于获得蜗轮表面坐标,Sg(igjgkg)和Sw(iwjwkw)分别是蜗轮上静坐标和蜗杆上静坐标,S1(i1j1k1)和S2(i2j2k2)分别是蜗轮和滚刀的动坐标系,θ1,θ2为蜗轮、蜗杆在定坐标系转角。第二次包络形成蜗轮齿面Σ1,啮合点处的单位公法线向量与第一次相同。由于单位公法向量为自由向量,只考虑坐标的旋转变换,所以有


图2 第二次包络坐标系
啮合点处的相对运动速度可由下式求得

令w(1)=1则

把(12)(13)代入(11)得:

据此,根据共轭理论可知第二次包络通用共轭函数为

其中
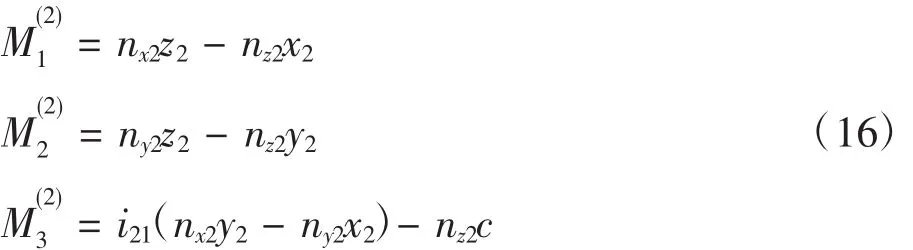
通过坐标变换,将式(15)中 x2、y2、z2用 x1、y1、z1代替得第二次包络通用共轭函数:


通过坐标变换,将坐标系S2中的p2转换到坐标系S1中p1

联立 (1)、(2)、(8)、(9)、(10)、(16)、(17)、(18)得到第二次包络蜗轮齿面通用接触线方程。
2 平面二次包络环面蜗杆副
2.1 标准平面二次包络环面蜗杆副接触线方程
包络面为平面的环面蜗杆传动,称为平面二次包络环面蜗杆传动,见图3.

图3 成型面坐标系
由(1)可知

由(2)可得

将(18)(19)代入(9)可得
所以将式(21)代入(8)得第一次包络啮合函数为:

把式(18)(19)(20)代入(8)可得

把式(23)代入到(17)可知标准平面二次包络环面蜗杆传动共轭函数为:

联立 (1)、(2)、(8)、(9)、(10)、(16)、(24)、(18)得到平面二次包络蜗轮齿面通用接触线方程。
2.2 数值求解
求解平面二次包络环面蜗杆传动接触线方程关键是求解式(24),由于上面推导的式(24)是关于θ2的非线性三角函数,无法直接求解,因此要对其进行牛顿迭代法求解。由图4可知共轭函数关于转角θ2连续可导,所以可以使用牛顿迭代法进行求解。迭代求解的流程如下:
设θ为式(24)φ(2)=0的根,给定初始值θ=θ2.
将θ2代入如下所示的迭代关系式,求解出新的θ2作为θ的一次近似值。

将θ的一次近似值作为新的θ值,代入迭代关系式得到θ的二次近似值,循环进行。因为共轭函数关于转角θ2连续可导,由Matlab求得共轭函数的导函数如图4所示,可知初始值取60°,此时迭代关系式必定有收敛解。控制结果计算误差为0.001°进行求解,最终完成平面二次包络环面蜗轮齿面接触线求解。

图4 共轭函数连续可导性
已知蜗杆为单头蜗杆,传动比i21=40,模数m=10.03 mm,蜗轮齿顶圆直径为417.36 mm,齿根圆直径为381.24 mm,分度圆直径为401.3 mm;蜗轮齿距角为9°,工作起始角为6°.最后通过Matlab程序计算,在Matlab软件中求得蜗轮齿面上接触线如图5所示。

图5 蜗轮接触线
3 结束语
(1)本文详细推导了标准二次包络环面蜗杆副通用接触线方程,然后以平面二次包络环面蜗杆传动为例验证其正确性,这对推导一般环面蜗杆副接触线方程具有指导意义。
(2)本文采用牛顿迭代法的数值方法求解了接触线方程,并通过实例计算,得到蜗轮接触线图,此数值方法对求解其它超越方程具有参考价值。
参考文献:
[1]郑 亮,费 凌.基于MATLAB滚锥包络环面蜗杆副接触线的求解方法[J].西华大学学报(自然科学版),2008,27(1):63-65.
[2]段德荣.包络环面蜗杆传动通用啮合函数及其应用[J].太原工业大学学报,1987,1(2):30-41.
[3]阳 培,王长路.用啮合原理与数值方法求蜗杆副接触线[J].机械传动,2004,1(2):4-6.
[4]胡来瑢.空间啮合原理及应用(下册)[M].北京:煤炭工业出版社,1986:58-76.
[5]董学朱.环面蜗杆传动设计和修型[M].北京:机械工业出版社,2004:15-30.
[6]L.V.Mohan,M.S.Shunmugam.Geometrical aspects of double enveloping worm gear drive[J].Mechanism and Machine Theo ry,2009,44(11):2053-2065.
