基于声波共振的液位测量实验系统设计与测试
2018-03-30徐晓滨方丹枫
徐晓滨, 李 果, 方丹枫
(杭州电子科技大学 自动化学院, 浙江 杭州 310018)
超声波液位测量方法应用广泛[1-2],但在实际的工业应用中,被测液体表面常常漂浮大量的泡沫、残渣等异物,当超声波遇到漂浮在液面上的异物会发生寄生反射现象,降低超声波液位仪的测量精度[3-4]。低频可闻声波的波长较长,当遇到异物时可以发生衍射,绕开异物继续传播,从而避免了寄生衍射。
本文结合承担的国家自然科学基金重点项目“面向工业大系统安全高效运行的报警设计与消除方法及应用”和“船舶电力推进系统状态监测与故障诊断的信息融合方法”中对于液位变量测量与状态监测的实际需求,设计了一套基于低频可闻声波共振的液位测量系统,实现宽范围液位高度的测量。该系统由声波发射器、声波接收器、处理单元以及显示单元组成,量程在0.6~10 m之间,测量精度可以达到1%,优于市面上大部分的超声波液位仪,且造价低廉易于推广。测控类专业和化工类专业的学生不仅可以通过该系统熟悉声学传感及工业过程变量检测系统的工作原理、运行机制,完成相关课程单元知识的实验科目外,还能开展以状态监测与故障诊断为目的的开放式实验项目,调动学生开展实际工业监控系统中基于监测变量的故障监测方法与技术的研究,从而提升自主学习与科研能力,达到开放式创新实践教学的目的。
1 基于低频可闻声波共振的液位测量系统结构及测量原理
液位测量系统结构见图1,由扬声器、麦克风、温度计、控制处理单元、导声管、温度计等组成[5-6]。
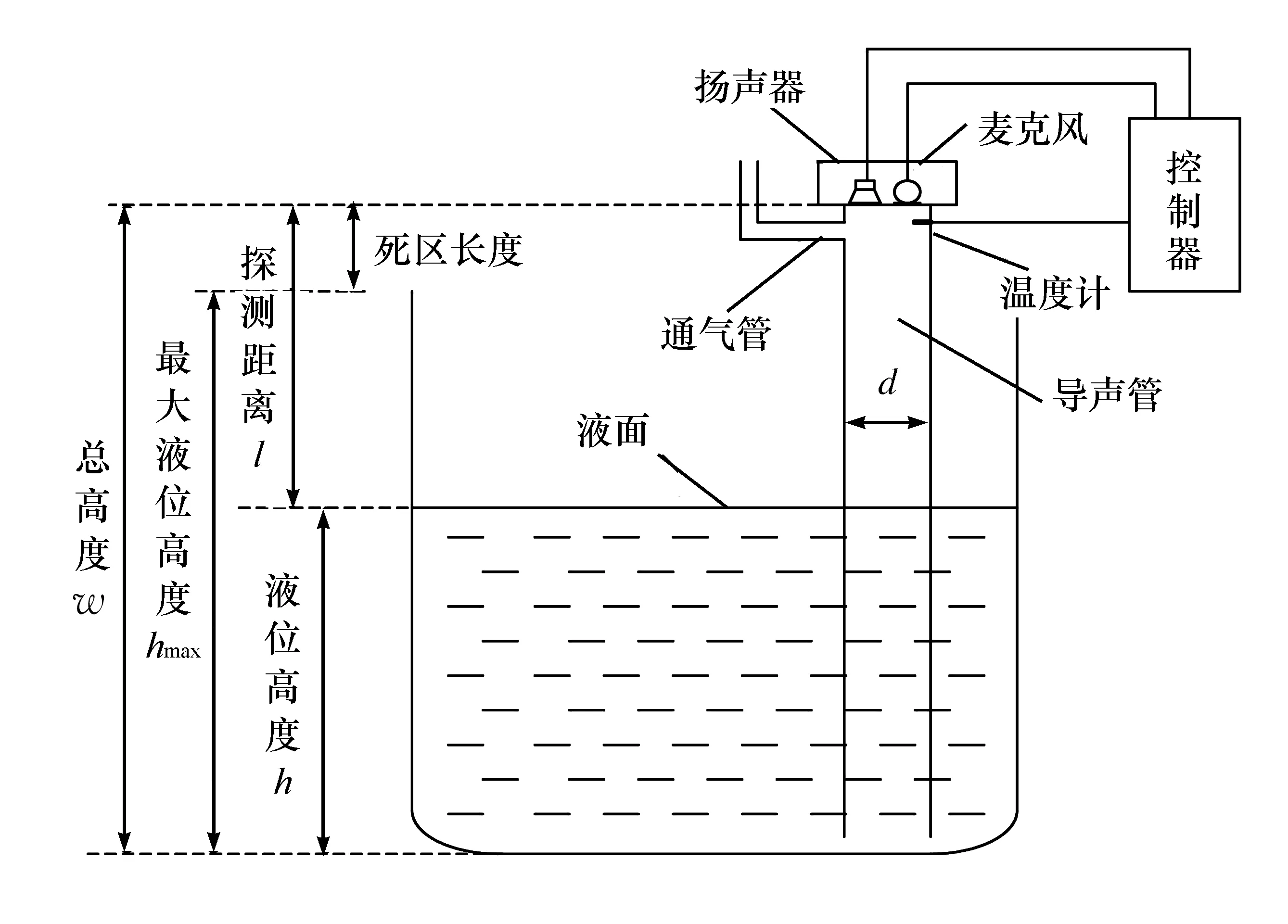
图1 液位测量系统结构
通过扬声器发出频率随时间变化的扫频声波。在发声的同时,通过控制麦克采集数据。扬声器产生的声波沿导声管的方向传播到液面并垂直反射回来,扬声器发出的声波信号与反射声波信号叠加产生驻波[7]。定义y1为扬声器产生的声波,y2表示反射声波,则有:
(1)
(2)
合成波为
(3)
其中,A是声波的幅度,f是声波的频率,l是从扬声器到液面的距离,亦即探测距离。
对于不同的高度,所采集到的合成波中都会包含一组驻波,每个驻波所对应的频率即共振频率[8]。例如在2 s内,通过扬声器发出1 kHz~2 kHz随时间均匀变化的扫频信号,探测距离l=2 m。此时所采集到的信号如图2所示,共出现11个共振点(图中幅值最大的11个点)。
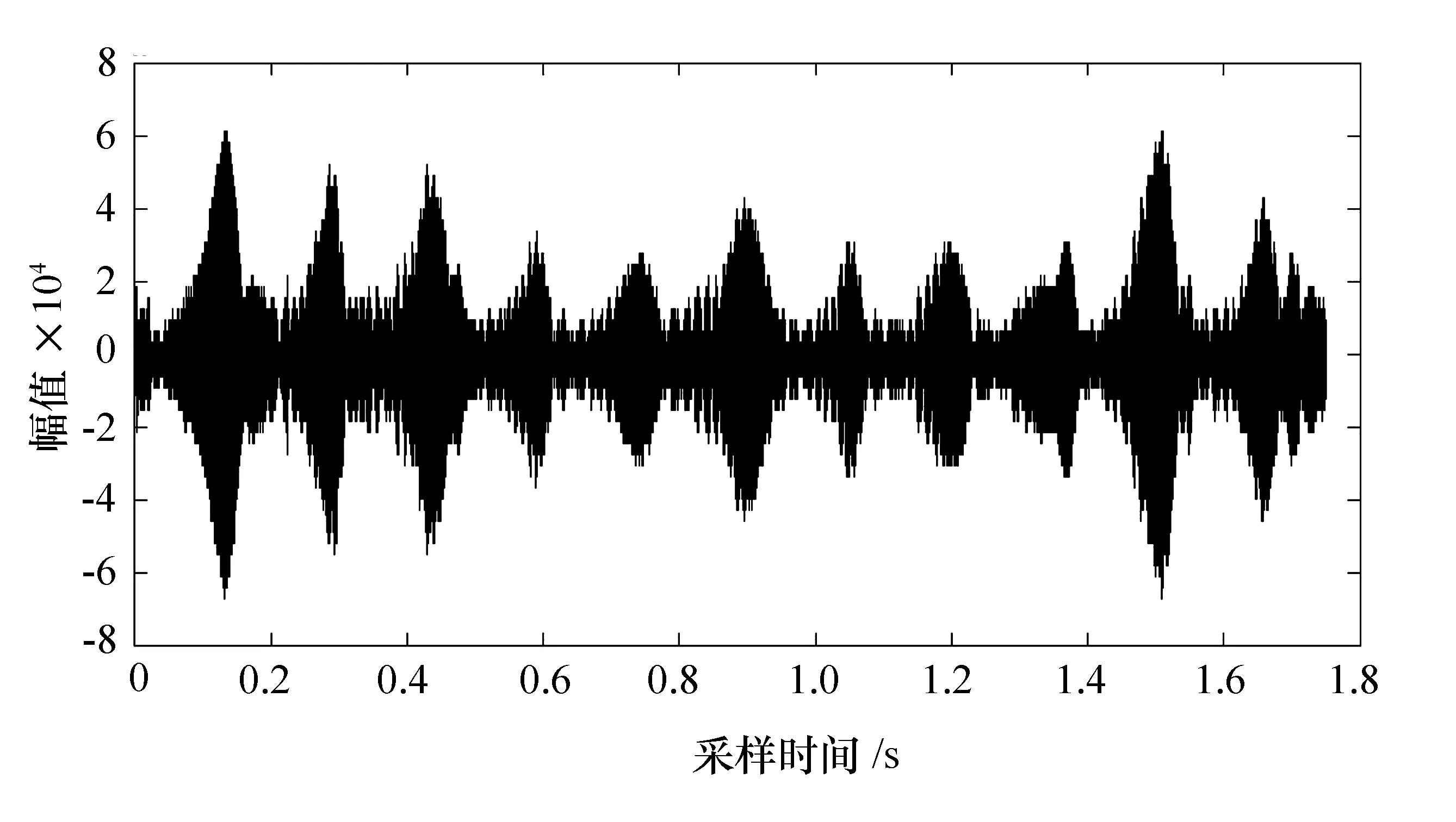
图2 合成的正弦波(l=2 m)
每个驻波所对应的频率与长度的关系为
(4)
其中:k为1 kHz~2 kHz内出现的第k个驻波;m是共振点的个数;f(k)是在该频率段出现的第k个共振频率;c是声波在空气中传播的速度,c=331.45+0.61T[9];n(k)表示f(k)是初始共振频率的多少倍,具体计算如下:当k=1,2时,由(4)式可知
(5)
变换后有
(6)
根据不完全归纳法可得
(7)
则
(8)
由上式可知,通过任意相邻的2个共振频率的差值,就可以计算出n(k)。但受到实际测量环境中众多不确定因素的干扰,上式中的n(k)可能不是整数,若将它代入(1)式计算,会引起较大的误差。在1 kHz~2 kHz频段内出现的共振频率是初始共振频率fRF的整数倍,并有f(k+1)-f(k)=fRF,所以可令
(9)
分母是相邻共振频率的差值的平均值,并对其去整数位||·||,使得

(10)
那么,(4)式可变换为
(11)
最终计算得到液位高度h为

(12)

(13)
亦即m-1个测量值的平均值,取平均的操作可以有效降低观测噪声对测量结果的影响。
2 液位测量实验系统设计
基于以上测量原理设计的实验系统由硬件数据采集装置和软件数据处理两部分组成,其总体结构如框图3所示,实物如图4所示。
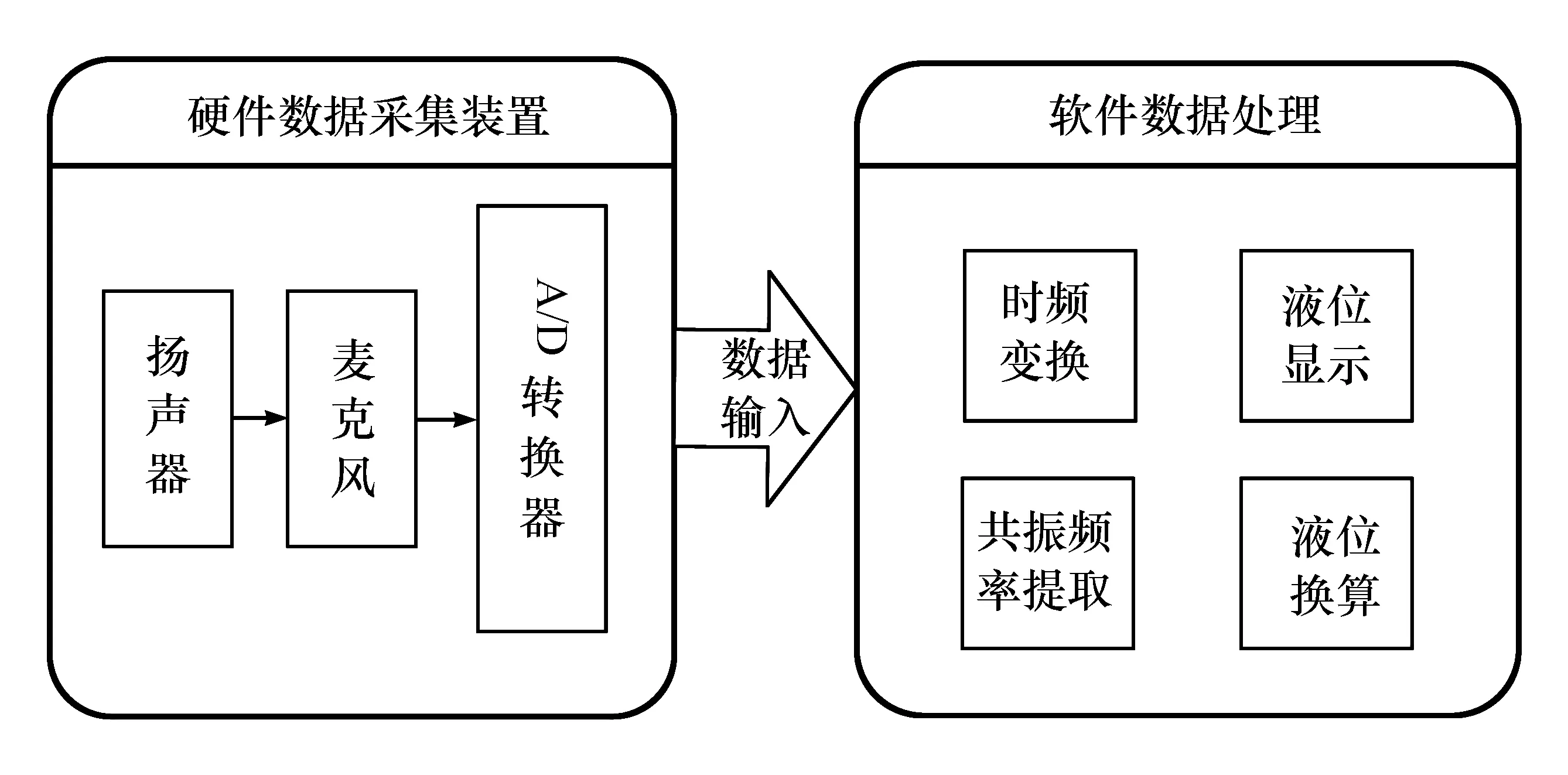
图3 液位测量系统的总体结构框图
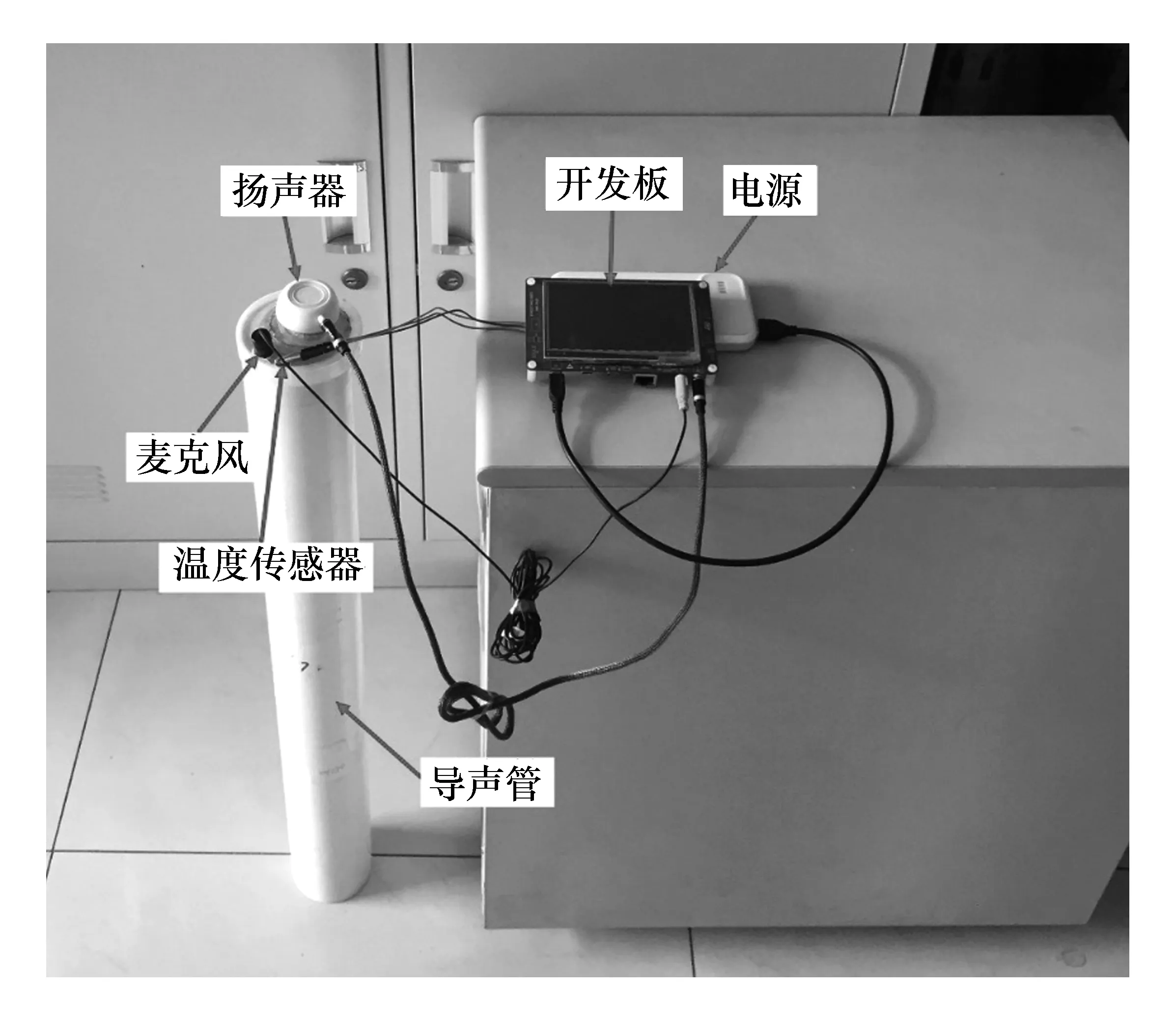
图4 液位测量系统的实物图
声波信号的发射和采集分别由扬声器和麦克风实现,通过A/D转换器将声波信号转换为数字信号。数据处理模块将采集到数据进行快速傅里叶变换,把时域信号转换为频域信号,提取共振频率点,进而计算出液位的高度并给予显示。
2.1 实验系统硬件设计
选用STM32F746G-DISCO开发板作为主控制器实现声波的收发、存储与处理,其使用的微控制器为STM32F746NGH,基于ARM Cortex-M7内核,具有强大的运算处理能力,可以满足音频信号的计算与处理需求。它搭载了音频解码芯片WM8994,该芯片具有高集成、低功耗、高保真等特点,可以保证扬声器发出的声音信号和麦克风采集到的声音信号都具有较好的精准性。
扬声器选用F10电动式扬声器,用于发射频率随时间变化的声波。该型号的扬声器结构简单,可发出声波的频率范围在20 Hz~20 kHz,信噪比在90 dB以上,可以发出较为理想的声波且价格低廉。
麦克风选用TCM-340驻极体麦克,接收到的声波频率范围在70 Hz~16 kHz,灵敏度为-45 dB±3 dB,用于接收反射声波信号。该麦克结构简单易于固定安装且价格低廉。
导声管使用选用直径为7.5 cm,内壁为2 mm的PVC管材。PVC管材具有耐腐蚀性、耐药品性优良等优点,可以应用于多种场景。
温度传感器选用DS18B20,采用总线的方式与微处理器连接。该传感器价格低廉,抗干扰能力强,可以应用于各种恶劣的环境,测量温度范围可达-55 ℃~+125 ℃,在-18 ℃~+85 ℃测量精度可达到±5 ℃。
2.2 实验系统软件设计
该系统软件部分可以利用Windows下的Keil进行开发,它提供了C编译器、宏汇编、链接器、库管理以及在线调试等一系列功能,大大缩短了开发的时间。利用Keil工具,在平台下采用模块化设计,包括扫频信号的产生模块、共振频率提取模块、基于共振频率的液位换算模块等。各个模块各自独立,这大大提升了程序调试的效率。
(1) 扫频信号产生模块。主要产生频率随时间变化的声波信号。在规定的时间内,通过扬声器发出从fL到fH的扫频信号,这里选取fL=1 000 Hz,fH=2 000 Hz。
y=Acos(2πf(t)t)
(14)
其中,y表示扬声器发出的初始的声波信号,f(t)是在t时刻声波的频率,并随着时间t从fL开始均匀增加到fH截止。本系统中,发音和收音是同时进行的,故接收到的信号是发出的原始声波和液面反射波的合成波。
(2) 共振频率的提取模块。用于提取麦克风接收到的合成波中的共振频率。首先将采集到的合成波进行快速傅里叶变换,得到合成波频谱。由于测量环境中的干扰以及传感器存在的误差,会造成频谱中存在诸多噪声,所以需要采用相应的滤波算法去噪,并从中提取共振频率。常见的数字滤波算法有限幅滤波法、中值滤波法、算数平均滤波法和滑动平均滤波法等[10]。但是,由于频谱信号的数据数量较大、开发板的存储空间有限等原因,常见的数字滤波方法滤波及频率提取效果有限。在文献[11]提出了一种共振频率快速提取算法,分别对频谱进行一次平滑、二次平滑、最后进行共振频率的峰值提取,分步降低数据的处理规模,减小处理器的负荷。
(3) 基于共振频率的液位换算模块。该模块在提取出共振频率的基础上,基于式(12)和式(13)计算出液位的高度。
3 液位测量实验
声波信号的发出、接收、共振频率提取、液位计算在5 s内即可完成,整个运行流程如图5所示。首先将麦克风、扬声器、温度传感器放置在导声管的一端,保持与导声管垂直,按下开发板背部的开始按键,由开发板主控制器发出指令,由扬声器发出一组在1 kHz~2 kHz内随时间均匀变化的扫频信号(时长为2 s);与此同时麦克风采集合成波信号回传到开发板中,通过开发板中的音频编码解码器将声波信号转换为数字信号;处理器利用FFT算法将时域信号转换为频域信号,进而通过共振频率快速提取算法将频域信号中的共振频率提取出来,最终根据共振频率点计算液位高度并给予显示。
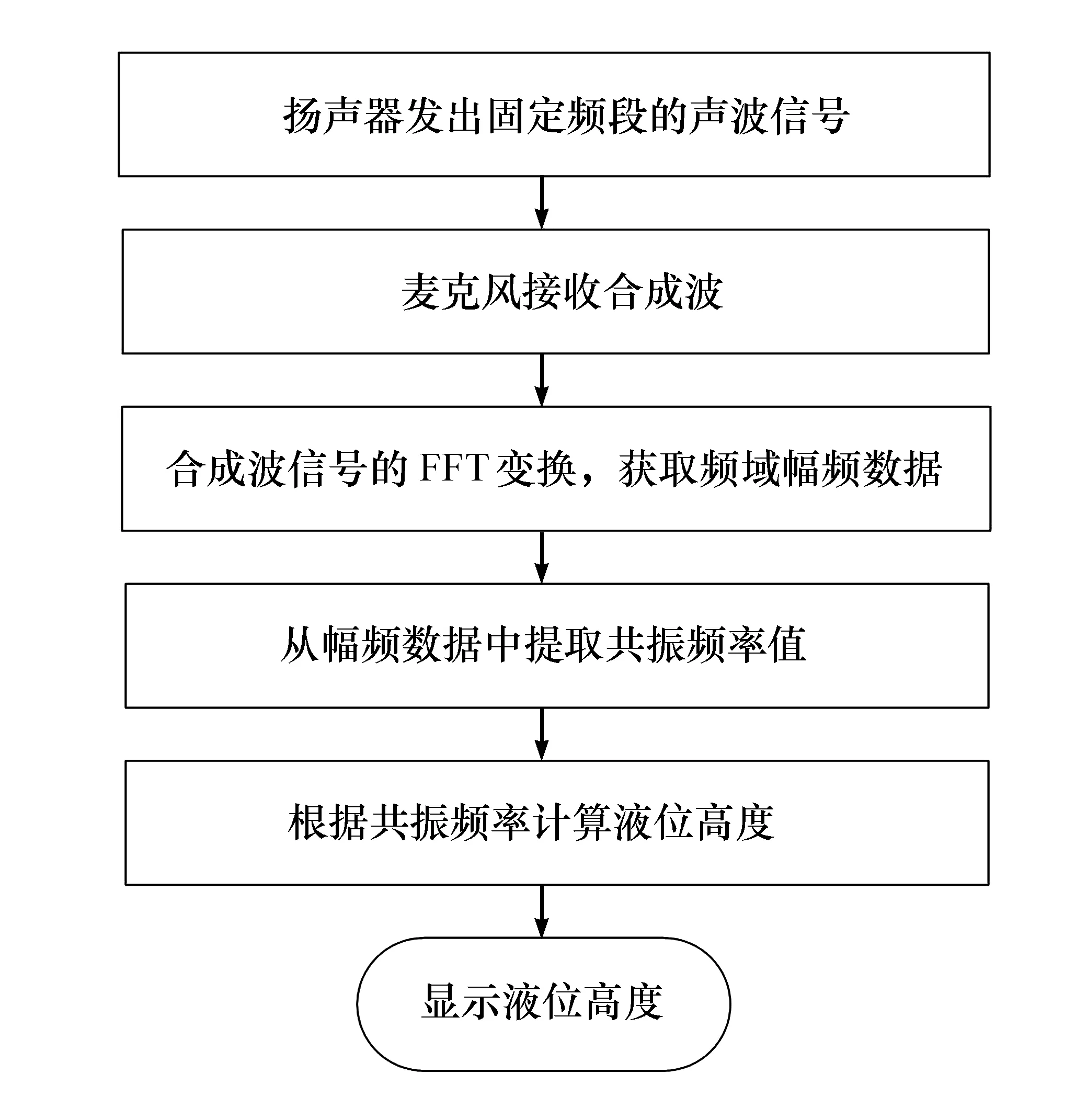
图5 液位测量流程
l=2 m时通过共振频率快速提取算法获取的共振点频率值见图6。图7给出了系统的显示效果,液位高测量值为2.018 m,相对误差9‰,达到了较高的精度。表1给出了0.6~10.6 m区间段中12组不同长度的测量结果(2次),经过多组实验数据的统计分析,平均的相对误差1%,精度优于一般超声测距的精度(一般超声测距的平均相对误差为5%[12])。
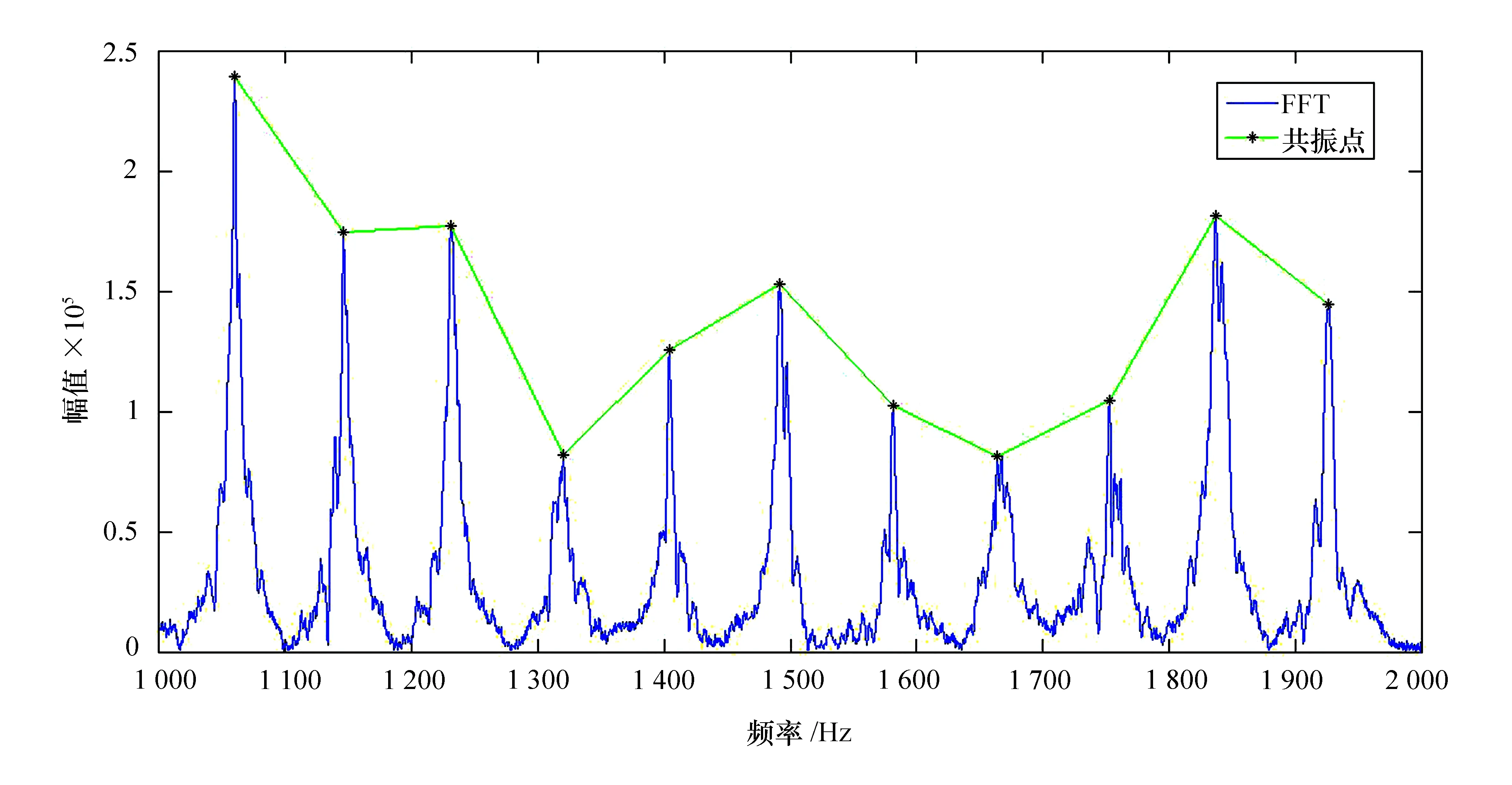
图6 l=2m时的频域数据以及从中提取的共振频率点
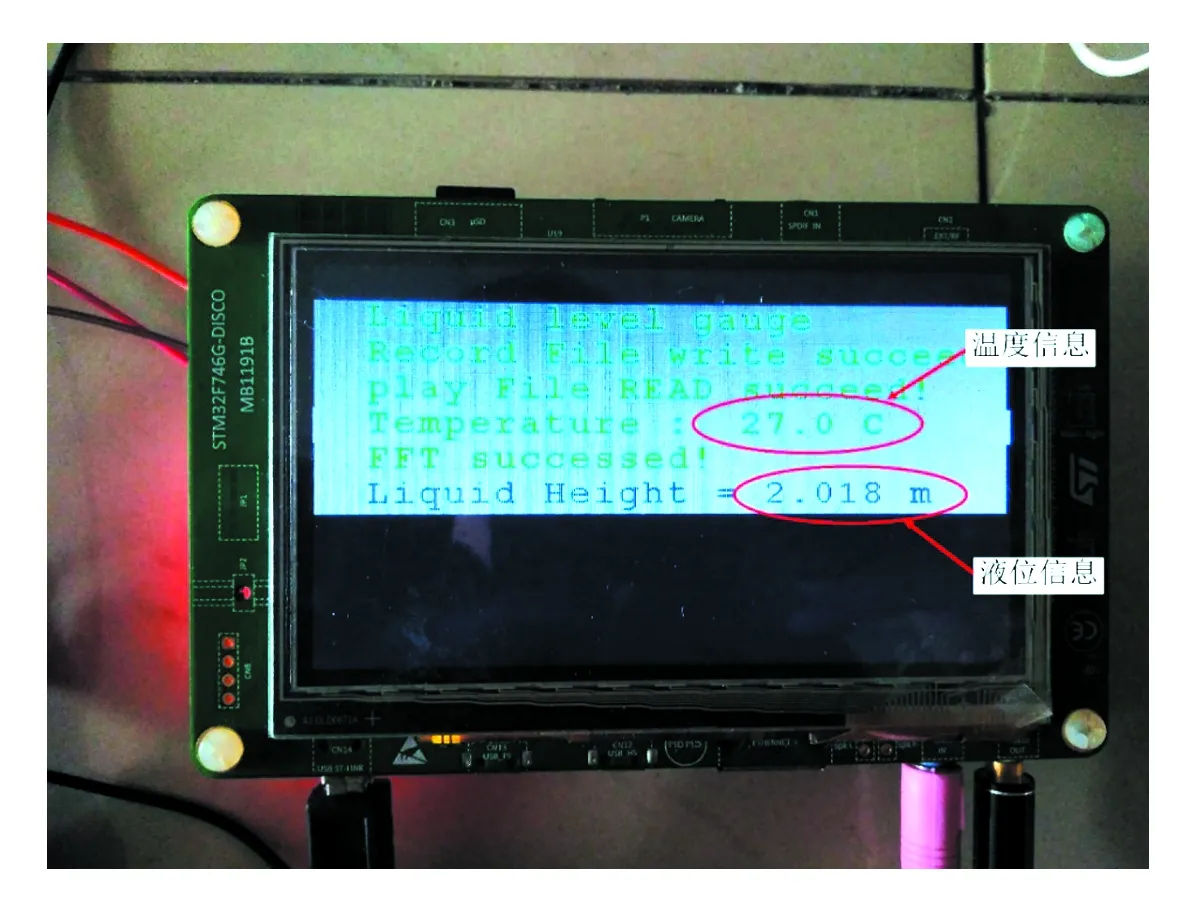
图7 液位测量的显示界面
4 实验项目设置
实验系统可以完成以下实验项目:
(1) 扫频信号的生成实验:熟悉Matlab/C语言的基本指令,利用Matlab/C语言生成在固定频段内随时间均匀变化的扫频信号;
(2) 声共振原理实验:了解声波共振的原理,采集不同液位高度下的合成波信号,利用Matlab/C语言中的FFT算法计算不同液位高度下的合成波频谱,分析不同高度下共振频率的变化情况;
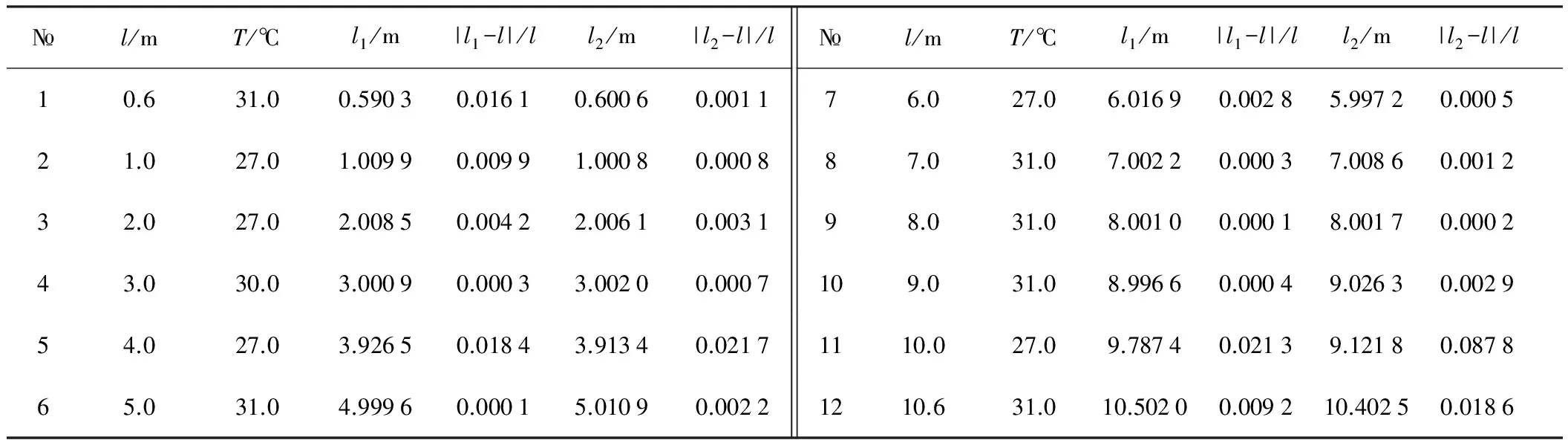
表1 不同液位高度的测量结果
注:l—实际的距离;l1,l2—测量的两组数据。
(3) 声共振频率的数字滤波实验:提取声波信号的共振频率,由于测量环境中存在不同程度的干扰,所以合成波频谱中会存在噪声,可以利用Matlab/C语言编写不同原理的滤波算法,对比不同滤波算法的去噪效果;
(4) 硬件搭建实验:了解硬件的主要组成部分,根据不同的应用需求进行硬件选型实践;
(5) 软件模块测试实验:根据模块化的思想编写各个模块的代码,进行调试。将具有不同功能的模块代码进行整合,实现实验要求的功能。
5 总结
本文设计了一套基于声波共振的液位测量实验系统,该系统具有以下特点:
(1) 实用性:该液位测量系统的测量对象为化工和石油的液罐,可以对液位进行实时监测,通过对其功能和原理的理解,可以使学生掌握常见的声学原理解决实际的工程测量问题的方法;
(2) 系统性:该实验系统包括扫频信号产生、声波信号的发射与接收、数据的处理与显示,通过合成波的采集、共振频率提取算法的设计等过程,学生能够理解工业变量测量系统设计的整体过程,为以后参与类似的工程系统设计打下基础;
(3) 综合性:该实验系统包括硬件数据采集装置和软件数据处理模块,根据模块化的思路进行设计,可以分为多个实验供学生学习实践,能够提高学生的硬件设计和软件编写能力。
References)
[1] 刘唐唐.基于超声波的液位测量装置设计[D]. 西安:西安工业大学, 2016.
[2] 王娜丽,宋光坤.超声波液位仪的设计与制作[J].电子技术与软件工程, 2014(20):152.
[3] 王原, 许飞. 浅谈液位计的发展与研究[J].工程技术(全文版), 2017(3):00245.
[4] 刘凡, 卢素兰. 污水处理液位测量综述[J].广东化工, 2015, 42(21):127-128.
[5] Donlagic D, Zavrsnik M. Low frequency acoustic resonance level gauge[C]// Instrumentation and Measurement Technology Conference, 1999 Imtc/99 Proceedings of the IEEE. IEEE, 1999:870-875.
[6] Donlagic D, Zavrsnik M, Sirotic I. The use of one-dimensional acoustical gas resonator for fluid level measurements[J].IEEE Transactions on Instrumentation & Measurement, 2000, 49(5):1095-1100.
[7] Xu X, Li Z, Li G, et al. State Estimation Using Dependent Evidence Fusion: Application to Acoustic Resonance-Based Liquid Level Measurement[J]. Sensors, 2017, 17(4):924.
[8] 赵辉,丁雷,杨培敏.利用声共振测量管件长度的研究[J].宇航计测技术,1998(6):1-7.
[9] 买买提热夏提·买买提,亚森江·吾普尔,复尔开提·夏尔丁.简谈空气中的声速与温度关系[J].物理实验, 2007, 27(11):43-44.
[10] 王颖,金志军.常用数字滤波算法[J].中国计量, 2012(3):99-100.
[11] 徐晓滨,赵晨萍,夏丙铎,等.基于固定频段声波共振原理的液位测量方法[J].计量学报, 2011, 32(1):53-57.
[12] 刘赟,王波,刘智超.一种基于超声测距技术的超声液位仪设计[J].传感器与微系统,2014, 33(9):91-93.
