鼢鼠挖掘活动及爪趾几何特征量化分析
2018-03-30王洪昌王忠民佟金
王洪昌,涂 鸣,刘 念,曾 荣,王忠民, 佟金
(1.华中农业大学工学院,湖北武汉 430070;2.农业部长江中下游农业装备重点实验室,湖北武汉 430070;3.兴安盟草原工作站,内蒙古乌兰浩特 137400;4.吉林大学生物与农业工程学院,吉林长春 130022)
生物经过亿万年的进化和优胜劣汰的过程,优化了生物体宏观与微观结构、形态与功能、运动方式与行为、能量与物质转化方式等,使其适应周围环境的能力得到大大的提升。仿生学是研究生物系统的结构、性状、原理、行为,为工程技术提供新的设计思想、工作原理和系统构成的技术科学,是一门生命科学、物质科学、数学与力学、信息科学、工程技术以及系统科学等学科的交叉学科,它的出现为科学技术创新提供了新思路、新原理和新理论[1-2]。土壤洞穴动物长期生活在土壤环境中,经过长期进化,已优化出能适应土壤环境的活动方式和能力,逐步形成了独特的几何结构和优良的功能,这些突出的特征能为人们的仿生研究提供很好的基础[3-5]。
鼢鼠(Myospalax)属哺乳纲、啮齿目、鼠形亚目、鼠总科、鼹形鼠科、鼢鼠亚科,俗称瞎老鼠、地羊。鼢鼠是典型的土壤洞穴动物,常年营地下生活,地面活动较少,体型粗圆,眼睛退化严重,视觉极不发达,嗅觉与听觉发达,避光怕风,喜食植物地下根茎,每年的4—5月和9—10月是其活动的高峰期,鼢鼠的生物学特性以及对草原、林场、农作物等的危害已被大量研究[6-11]。鼢鼠四肢短粗有力,前爪特别发达,其中尤以第3趾(中间趾)最长,在挖掘洞道过程中发挥重要作用。鼢鼠挖掘能力强,有研究表明,1 min能挖掘80~100 mm长的洞道,它的平均挖掘速度达到50 mm/min,每只鼢鼠一年推出地面的土量达到1 024 kg[12-14]。林恭华等[15]研究发现,高原鼢鼠与挖掘效率有关的尺骨挖掘动力臂系数是高原鼠兔和根田鼠的2倍多,显示其较强的挖掘能力。因此鼢鼠爪趾为土壤挖掘和切削工具的仿生设计提供了很好的学习参照,笔者通过研究东北鼢鼠的挖掘活动规律,爪趾几何结构特征以及爪趾内外轮廓线特征,为后续土壤挖掘和切削工具的仿生设计提供技术参考。
1 材料与方法
1.1材料供试东北鼢鼠(Myospalaxpsilurus)(图 1) 捕捉于内蒙古自治区兴安盟科尔沁右翼前旗西北部的满族乡(120°57′~121°50′E,46°26′~47°02′N)。东北鼢鼠生活环境的土壤类型主要是黑钙土、栗钙土和草甸土。选取3只成年雄性东北鼢鼠为主要研究对象,体重为(0.37±0.05)kg。

图1 捕捉的东北鼢鼠照片Fig.1 A photograph of a captured Myospalax psilurus
1.2挖掘活动的观察将东北鼢鼠饲养在尺寸为800 mm×400 mm×700 mm的玻璃缸内, 玻璃缸内装有野外取回的土壤,缸体下部开有用于通气的小孔,由于东北鼢鼠怕光同时为防止逃脱,缸口用布和木板压盖,所用玻璃缸见图2。用胡萝卜、土豆、白菜、草根等加以喂养,发现其对胡萝卜的喜食程度较高。用高清摄像机拍摄东北鼢鼠挖掘活动的过程,用EDIUS6.0视频处理软件对采集的视频信息进行处理。

图2 观察东北鼢鼠挖掘活动的玻璃缸Fig.2 The observed aquarium of Myospalax psilurus burrowing activities
1.3几何特征的观察采用二氧化碳吸入法将鼢鼠处死[16],将鼢鼠前后爪趾切下,用85%酒精清洗后风干,制成样本。采用奥林巴斯SZX12型体视显微镜观察鼢鼠爪趾形态和几何结构。
1.4爪趾轮廓特征曲线提取及分析利用MATLAB软件的形态学数字图像处理功能,对鼢鼠爪趾轮廓特征进行提取,将提取的特征曲线进行拟合,得到内外轮廓曲线拟合方程,并分析内外轮廓曲线曲率的变化规律。
1.5仿生除草铲设计将鼢鼠前爪爪趾内轮廓曲线方程应用到农业机械触土部件的设计中,设计了一种用于苗期株间除草的仿生除草铲,并对其进行仿真分析。
2 结果与分析
2.1爪趾的几何结构特征东北鼢鼠的前后爪趾(分别见图 3和图 4)在宏观形态上有着明显的差异。前爪粗壮、厚大,爪尖而利,呈镰刀状,是主要的挖掘器官。爪趾根部厚而粗,呈椭圆形,中间三趾前端呈圆锥楔,外侧两趾扁平且前端稍尖,爪趾根部到前端之断面尺寸逐渐变小,这种结构在保证爪趾结构强度的情况下,在挖掘过程中有利于入土;后爪爪趾短而薄,呈拱形,在挖掘过程中可以牢牢的抓住地面并支撑身体,扒土时容易将土扒向后方;后爪有较大的肉垫,在挖掘活动中主要起支撑身体的作用。

图3 东北鼢鼠前爪Fig.3 Fore claw of Myospalax psilurus
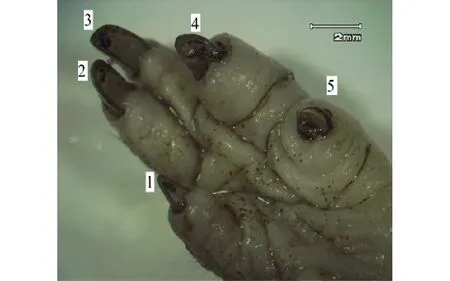
图4 东北鼢鼠后爪Fig.4 Hind claw of Myospalax psilurus
东北鼢鼠的前爪是主要的挖掘工具,其排列方式与鼹鼠、达乌尔黄鼠、家鼠等“一”字排列不同[2,17]。东北鼢鼠前爪爪趾是空间弧线形排列,中间趾(见图 3中的标号3)在最前端,第2趾和第4趾在中间趾后侧一定角度和距离处,第1趾和第5趾排列最靠后,这种排列方式使前爪中间三趾组成立体凹型空间,形成挖掘斗,在挖掘过程中像挖掘机似的高效掘土,增强其挖土能力,第1趾和第5趾在挖掘过程中起辅助作用。利用游标卡尺测量前爪各爪趾,结果表明前爪中趾(即第3趾)长度、宽度和厚度均大于其他趾,在挖掘过程中起主要作用,因此选取爪趾3作为后续的研究样本,其几何形体如图 5所示。

图5 东北鼢鼠前爪中间趾照片Fig.5 The middle toe of fore claws of Myospalax psilurus
由图 5可知,前爪中趾根部宽而厚,越靠近尖部越薄,使爪趾尖部呈楔形,经测定,前爪中趾的两向楔角分别为28.5°和39.6°,这与耕作部件楔角随阻力变化的最小角度在20°~45°相符合[18],楔形的爪趾端部一方面能减小应力集中,增强与环境条件相适应的机械强度,提高在土壤挖掘过程中的耐磨性能;另一方面是在保证楔入力尽量大的情况下,使顶端过度圆角增大,改善端部土壤应力分布,改变压实土壤的形状,减少土壤黏附。爪趾背面呈弧线形,且曲面光滑平缓,光滑的背面在减少挖掘阻力的同时能保证挖掘的洞道表面光滑平整。爪趾内侧中部到尖部相较于根部与中部之间有一定变化,有磨损痕迹,并且磨损痕迹不对称,这是由鼢鼠的挖掘方式造成的,在掘土过程中爪趾前部与土壤接触较多时间也长,受力较大,磨损严重,后部主要功能是使土壤沿爪趾面翻转滑落,磨损较轻,且爪趾在挖掘过程中与地面垂直面呈一定角度,爪趾受力不均匀,磨损程度不同,出现不对称的磨损痕迹。
2.2挖掘活动规律通过视频分析,东北鼢鼠在挖掘过程中的主要行为总结如下:① 头部扬起或伸入土壤内,鼻端靠近挖土点上方,用于探测方向和感知土壤坚实度,两只强有力的前爪交替掘土,为了便于掘土,在挖掘过程中爪趾与地面垂直面呈一定角度。②当掘下的土达到一定量时,用前爪将土壤扒至后爪处,并用后爪迅速将土踢向身体后方。③身体后方的土壤堆积到一定程度后,东北鼢鼠转身,背部弓起,收缩身体前部将身体重心落向后足,后足牢牢抓紧地面支撑身体,用头部和前爪通过伸展身体将土向前方推动,直至将土推出洞口。④在挖掘过程中遇到草根等食物时,用前爪抓住草根,用牙齿将草根咬断,然后送入口中进食,如若遇到石块等物体,随土壤将其推出地面(在野外地面土丘土壤中发现有大小不一的石块)。⑤挖掘一段距离后,用鼻端对洞道进行修正,以使土壤坚硬不至于掉落。李晓晨等[19]对鼢鼠洞道结构的建筑学意义进行了研究。
鼢鼠其中一次的挖掘过程的动作如图6所示,可知鼢鼠的挖掘动作与反铲挖掘机的挖掘动作相似,在沿洞道轴向挖掘时(图6a),前肢向前部伸出的同时绕前肢与桡尺骨的关节转动,将爪子插入土中一定深度,头部顶住前方未挖掘的土壤以便用力向后上方拉动,身体拱起,把挖出的土拉到身体下部存储,达到一定量后转身用头部和前爪将土推向洞道后方。在沿洞道径向挖掘时(图6b),后肢做为支撑,头部稍微扬起, 爪子绕与桡尺骨关节转动时,中间三趾向上张开,所形成的空间达到最大,使一次挖掘的土壤尽可能多,其中中间趾(标号3)是主要的挖掘趾,其入土最深,行程最大。
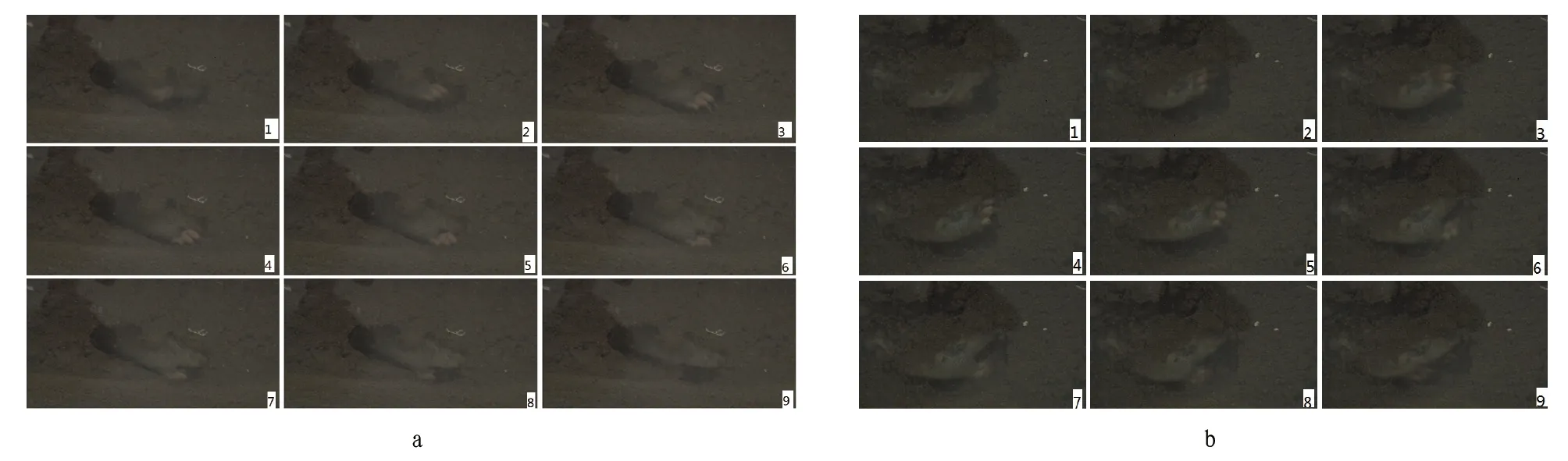
注:a.沿洞道轴向挖掘;b.沿洞道径向挖掘Note:a.Digging along the axial direction of hole;b.Digging along the radial direction of hole图6 一只前爪的挖掘过程说明Fig.6 The digging process diagram of a fore claw
鼢鼠在挖掘过程中,挖掘前肢左右开工,每次挖掘用一只前肢,另一只前肢与后肢起支撑作用。其前爪的挖掘运动近似为不规则的椭圆形(如图7),可以分为挖掘行程与返回行程,其中挖掘行程路线较长,返回行程路线短,这样前肢在挖掘过程中与土壤接触时间长,并且减少非挖掘行程的能耗,提高挖掘效率。
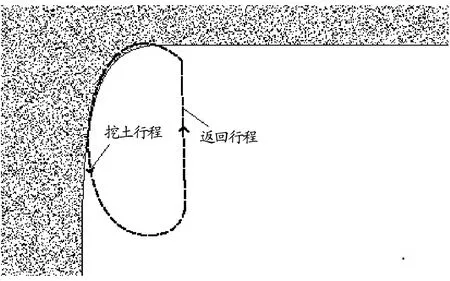
图7 前爪挖掘运动示意Fig.7 The digging motion diagram of fore claw
2.3爪趾轮廓特征曲线提取前爪爪趾是东北鼢鼠在挖掘过程中的主要挖掘工具,对爪趾几何结构特征的研究具有仿生学意义。为了更深入地了解东北鼢鼠爪趾轮廓的几何结构特征,在MATLAB软件中编程,利用软件的形态学数字图像处理功能,通过以下步骤对图像进行处理:①利用“rgb2gray”命令通过RGB各个分量的的加权和将RGB图像转换为灰度图像。②对图像进行封闭运算即先膨胀后腐蚀,填补图像空洞,连接相邻的对象和边界及区域,消除图像中的干扰点。③设置合适的阀值,基于阀值分割识别边缘,得到归一化的直方图并将灰度图像转换为二值图像。④对爪趾的边缘轮廓进行提取,存储边缘轮廓的二维点云坐标值以备后续处理,提取边缘轮廓后的图像如图 8所示。
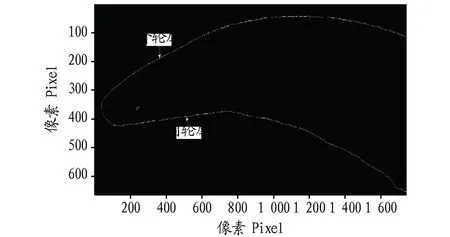
图8 提取边缘后图像Fig.8 The middle toe of fore claws of Myospalax psilurus
将提取的边缘轮廓的二维数据利用最小二乘法进行拟合,以曲线方程的形式对特征进行进一步描述[20],借鉴对鼹鼠、达乌尔黄鼠、小家鼠等啮齿动物前爪爪趾轮廓曲线的拟合函数形式[21-24],分别尝试用指数函数、多项式函数、高斯函数、傅里叶函数对鼢鼠爪趾轮廓曲线进行拟合,得到拟合方程,发现多项式函数和高斯函数与数据的拟合程度较好,通过判定系数R2和残差平方和SSE分别对多项式函数和高斯函数两种拟合形式的拟合精度进行比较,其中SSE值越接近于0表明曲线拟合越精确,R2越接近于1,表明方程拟合度越高。表1和表2分别列出了其中一只鼢鼠前爪中趾内外轮廓曲线的多项式函数和高斯函数的拟合方程系数、判定系数R2以及残差平方和SSE。通过对比发现,多项式函数在相同阶数的情况下拟合度更高更精确,因此最终选择7阶多项式方程拟合中趾内轮廓曲线(图 6所示位于下方的轮廓特征),6阶多项式方程拟合爪趾外轮廓曲线(图 6所示位于上方的轮廓特征)。
表1东北鼢鼠前爪中趾内外轮廓曲线拟合方程系数及判定系数-多项式函数
Table1CoefficientsoftheprofileequationsfittedandtheircoefficientofdeterminationofthemiddletoeofforeclawsofMyospalaxpsilurus-Polynomialfunction

项目Item方程系数Coefficientofequationp1p2p3p4p5p6p7p8判定系数(R2)Judgmentcoefficient残差平方和(SSE)Sumofsquaresofresiduals内轮廓Internalprofile2.705×10181.721×10144.469×10116.073×1084.591×1050.019123.9980.054680.99951.089×104外轮廓Outercontour2.125×10161.145×10122.344×1092.27×1060.0012870.7472299.30.99964093
表2东北鼢鼠前爪中趾内外轮廓曲线拟合方程系数及判定系数-高斯函数
Table2CoefficientsoftheprofileequationsfittedandtheircoefficientofdeterminationofthemiddletoeofforeclawsofMyospalaxpsilurus-Gaussianfunction
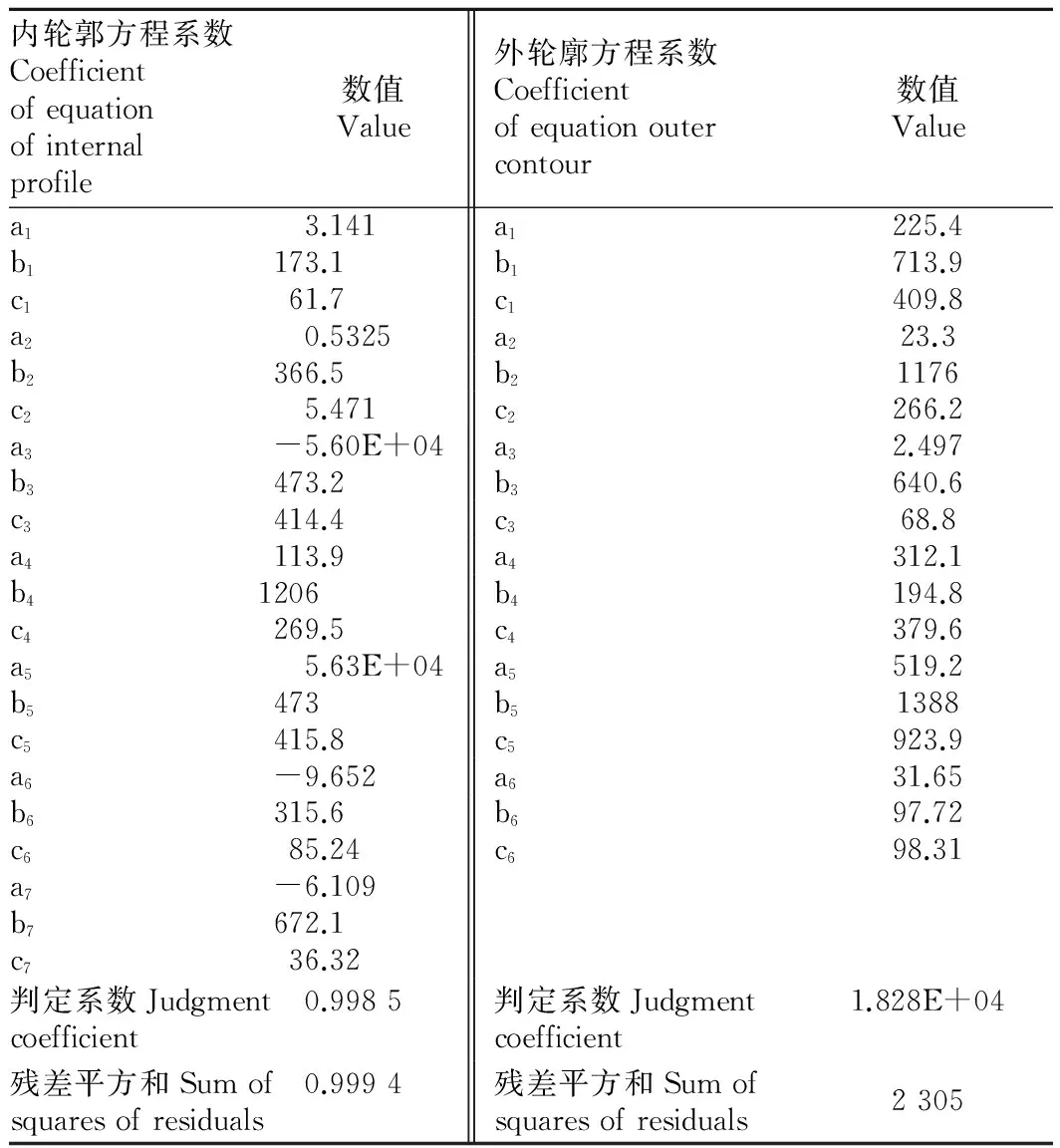
内轮郭方程系数Coefficientofequationofinternalprofile数值Value外轮廓方程系数Coefficientofequationoutercontour数值Valuea13.141 a1225.4b1173.1b1713.9c161.7c1409.8a20.5325a223.3b2366.5b21176c25.471c2266.2a3-5.60E+04a32.497b3473.2b3640.6c3414.4c368.8a4113.9a4312.1b41206b4194.8c4269.5c4379.6a55.63E+04a5519.2b5473b51388c5415.8c5923.9a6-9.652a631.65b6315.6b697.72c685.24c698.31a7-6.109b7672.1c736.32判定系数Judgmentcoefficient0.9985判定系数Judgmentcoefficient1.828E+04残差平方和Sumofsquaresofresiduals0.9994残差平方和Sumofsquaresofresiduals2305
内外轮廓多项式方程的表达式如下:
内轮廓曲线方程:
f(x)=p1x7+p2x6+p3x5+p4x4+p5x3+p6x2+p7x+p8
(1)
外轮廓曲线方程:
f(x)=p1x6+p2x5+p3x4+p4x3+p5x2+p6x+p7
(2)
根据拟合所得的多项式曲线方程,对轮廓曲线的一、二阶导数及曲率进行计算,轮廓曲线的二阶导数和曲率分别见图 9和图 10所示。
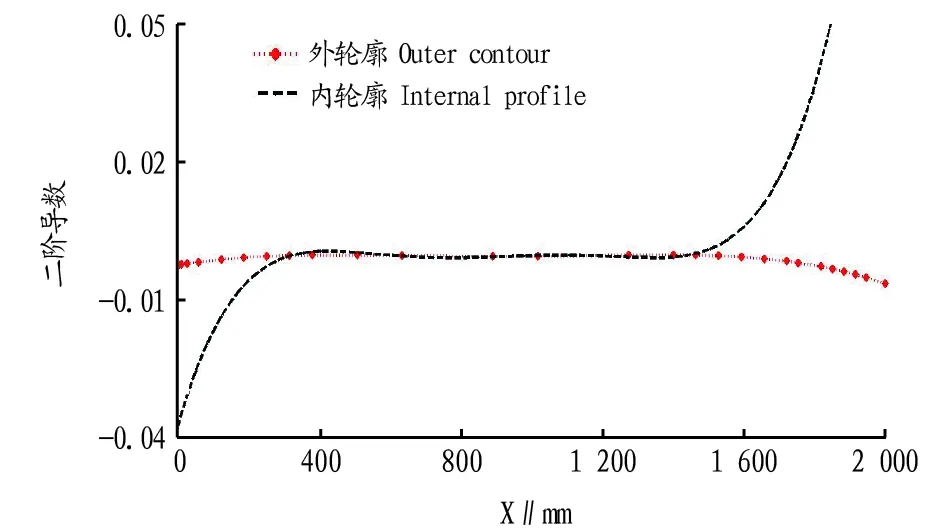
图9 鼢鼠爪趾轮廓曲线二阶导数Fig.9 The middle toe of fore claws of Myospalax psilurus
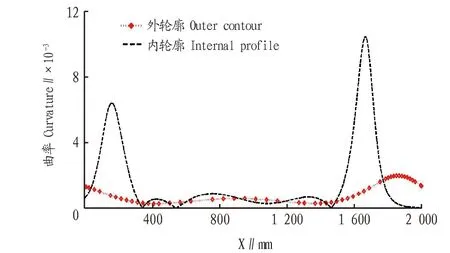
图 10 鼢鼠爪趾轮廓曲线曲率Fig.10 The middle toe of fore claws of Myospalax psilurus
由图 9可知,外轮廓曲线二阶导数变化不明显,内轮廓曲线有2个拐点,且除个别点外均小于零,曲线呈凸状。由图 10可知,东北鼢鼠爪趾外轮廓曲率变化较小,说明爪趾外轮廓表面较为光滑平顺,变化平缓,光滑的外轮廓能使鼢鼠在挖掘过程中减少摩擦阻力,使挖掘的洞道表面更加平整;爪趾内轮廓曲率起伏较大,有明显的波峰波谷出现,爪趾内轮廓表面变化较大是长期与土壤相互作用导致的,由于土壤的磨损致使爪趾前段曲率变化较大,变曲率特征在掘土过程中有利于土壤沿爪趾表面翻转脱落,爪趾尖端的变曲率更利于爪趾入土,并提高爪趾的结构强度。
2.4仿生除草铲设计与仿真鼢鼠前爪内轮廓是主要的触土面,其轮廓特征为农业机械触土部件的设计提供了参考。该研究以前爪中间趾内轮廓多项式方程为参考,根据农艺要求设计了一种苗期株间除草铲(如图 11所示),其中图11a为仿生曲线型除草铲,图11b为与仿生除草铲对照的圆弧型除草铲。
仿生除草铲运动过程如图 12所示,R是农作物保护区,Z是农作物,除草铲连接杆以离作物行距离a随机器向前行进,在除草过程中两个除草铲垂直于农作物行并侵入土壤20~30 mm,接近农作物保护区时除草铲向后摆动一定角度以避免侵入保护区伤苗,过了农作物保护区后再摆正继续除草。
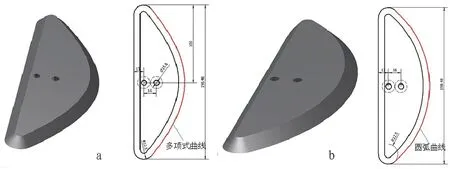
注:a.多项式曲线型除草铲;b.圆弧型除草铲Note:a.Biometric weeding-shovel; b.Normal weeding-shovel图 11 除草铲三维示意Fig.11 3-D solid of the weeding-shovel
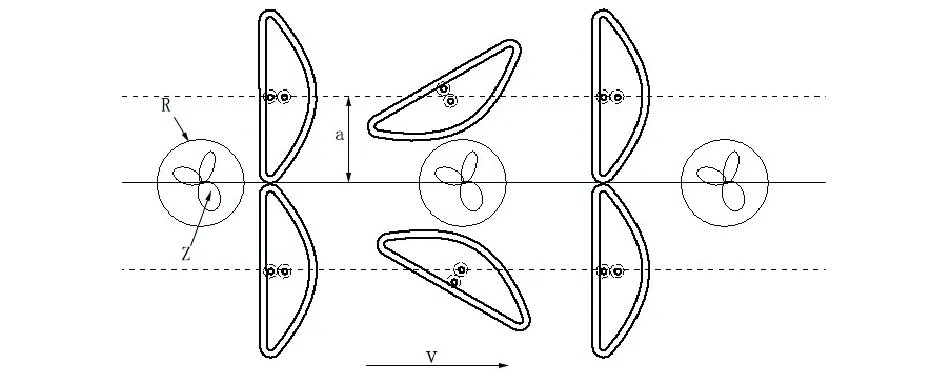
图12 除草铲运动过程示意Fig.12 The movement process of the weeding-shovel
除草铲在运动过程中的受到来自土壤的阻力F和力矩M,在软件Autodesk Inventor Professional 仿真模块中分别对仿生曲线型除草铲和圆弧曲线型除草铲进行应力分析,材料均选Q235钢,力F为100 N,力矩M为1,经计算仿生曲线型除草铲的体积和质量分别为6.18E+4 mm3和0.485 kg,圆弧型除草铲的体积和质量分别为6.48E+4 mm3和0.51 kg,可以看出仿生除草铲体积和质量都有所降低。
由图13可知,在受到相同力和力矩的情况下仿生除草铲产生的位移较小,即仿生除草铲在除草过程中能承受更大阻力,应力和应变的最大值集中在孔附近,且仿生曲线型除草铲的应力应变要小于圆弧曲线型除草铲,除草铲的除草效果将在后续研究中开展。
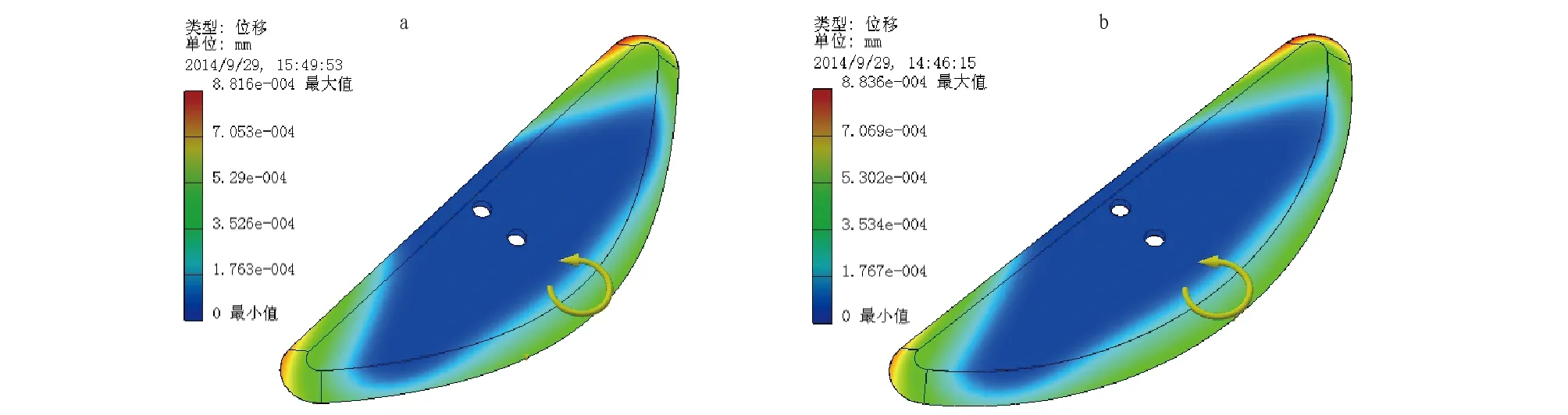
注:a.仿生除草铲位移图;b.圆弧曲线型除草铲位移图Note:a.The displacement of biometric weeding-shovel; b.The displacement of normal weeding-shovel图 13 除草铲的位移图Fig.13 The displacement of the weeding-shovel
3 结论
该研究以终生营地下生活的土壤洞穴动物——东北鼢鼠为研究对象,对东北鼢鼠爪趾的几何结构特征进行了观察和分析,重点观察了其主要的挖掘工具―前爪第3趾,研究发现其前爪爪趾粗壮,尖而利,呈镰刀状,其中以第3趾最粗壮最大,前端端部呈楔型,这种结构能减少应力集中,增强结构强度,利于入土,并且其爪趾的排列方式与其他土壤洞穴动物不同,这是长期进化的结果,更有利于在土壤中挖掘;其挖掘方式大体可以分为掘土、踢土、推土、食物或障碍处理、修补洞道几个步骤。利用MATLAB软件对东北鼢鼠前爪中间趾进行数字图像处理,得到边缘特征图像,采用最小二乘法对边缘特征数据进行拟合,通过比较高斯函数和多项式函数曲线方程,最终选择多项式函数作为爪趾内外轮廓的特征曲线方程。经过分析发现,外轮廓曲线光滑平顺,变化平缓,挖掘过程中能减少挖掘阻力,同时保证挖掘的洞道表面平整;内轮廓曲线曲率特征变化较大,在掘土过程中土壤更易沿爪趾翻转滑落。根据鼢鼠前爪中间趾内轮廓曲线方程,设计了一种具有仿生结构的苗间除草铲,仿真结果表明仿生曲线型除草铲在土壤中能承受更大阻力。
[1] LU Y X.Significance and progress of bionics [J].Journal of bionics engineering,2004,1(1):1-3.
[2] 汲文峰,佟金,贾洪雷,等.鼹鼠爪趾几何结构量化特征分析[J].农业机械学报,2010,41(4):193-198.
[3] TONG J,SUN J Y,CHEN D H,et al.Geometrical features and wettability of dung beetles and potential biomimetic engineering applications in tillage implements[J].Soil and tillage research,2005,80(1):1-12.
[4] 吴娜,张伏,佟金.臭蜣螂唇基切土减阻的力学分析[J].农业机械学报,2009,40(10):207-210.
[5] 高吭.东方蝼蛄(GryllotalpaorientalisBurmeister):特征、功能、力学及其仿生分析[D].长春:吉林大学,2009.
[6] 朝克图,卢保伟.东北鼢鼠生活习性和防治办法的初步探讨[J].内蒙古草业,2001,13(4):51-53.
[7] 徐涛,徐驰,孙继权.松嫩草原地区东北鼢鼠的发生特点[J].畜牧兽医科技信息,2011(5):98.
[8] 刘仁华,刘炳友.林区鼢鼠鼠害的主要特征及其生态控制对策[J].兽类学报,1997,17(4):272-278.
[9] 段君钢,任德波.东北鼢鼠危害林下参及防治方法[J].中国媒介生物学及控制杂志,2008,19(5):473.
[10] 任冬.东北鼢鼠的生活习性及其防治[J].内蒙古林业调查设计,2007,30(6):68-70.
[11] 王权业,周文扬,张堰铭,等.高原鼢鼠挖掘活动的观察[J].兽类学报,1994,14(3):203-208.
[12] 杨盛强,黎怀鸿.高原鼢鼠的活动特点与草地退化的关系[J].四川草原,1990(2):36-39.
[13] 周文扬,窦丰满.高原鼢鼠活动与巢区的初步研究[J].兽类学报,1990,10(1):31-39.
[14] WANG Q Y,ZHOU W Y,WEI W H,et al.The burrowing behavior ofMyospalaxbaileyiand its relation to soil hardness[J].Acta theriologica sinica,2000,20(4):277-283.
[15] 林恭华,曹伊凡,苏建平.高原鼢鼠四肢骨的进化适应性分析[J].动物学杂志,2007,42(5):8-13.
[16] 王月,邹曜宇.实验动物的处死方法[J].现代农业科技,2010(12):284.
[17] 郭志军,周志立,任露泉.达乌尔黄鼠爪趾几何特征分析[J].河南科技大学学报(自然科学版),2003,24(1):1-4.
[18] 任露泉,徐晓波,陈秉聪,等.典型土壤动物爪趾形态的初步分析[J].农业机械学报,1990,21(2):44-49.
[19] 李晓晨,李娜,王冬.鼢鼠洞道结构的建筑工程学分析[J].陕西师范大学学报(自然科学版),2001,29(3):86-90.
[20] 徐涛.数值计算方法[M].长春:吉林科学技术出版社,1998:62-77.
[21] 汲文峰,贾洪雷,佟金.旋耕-碎茬仿生刀片田间作业性能的试验研究[J].农业工程学报,2012,28(12):24-30.
[22] 汲文峰,贾洪雷,佟金.旋耕-碎茬仿生刀片田间旋耕作业功耗的试验研究[C]//中国农业工程学会 2011年学术年会论文集.北京:中国农业工程学会,2011.
[23] 郭志军,周志立,任露泉.仿生弯曲形切削工具切削性能的二维有限元分析[J].机械工程学报,2003,39(9):106-109.
[24] 张金波,佟金,马云海.仿生减阻深松铲设计与试验[J].农业机械学报,2014,45(4):141-145.
