基于改进ViBe的室外行人检测方法
2018-03-29陈升东
崔 莹,陈升东,袁 峰,李 引
(广州中国科学院软件应用技术研究所,广东 广州 511458)
0 引 言
随着摄像头安装数量的日益增多,以及智慧城市和公共安全需求的日益增长,采用人工视频监控方式已经远远不能满足需要,因此智能视频监控技术应运而生并迅速成为一个研究热点[1]。在实际应用中,对室外环境的行人进行检测监控一直是研究的难点,这是因为室外环境复杂多变,存在光照变化、树叶摇晃、小动物(尤其是夜间灯光引来的飞虫)等多种干扰。
目前最具影响力的行人检测方法是由Dalal等人[2]提出的HOG结合支持向量机(Support Vector Machine,SVM)分类器的方法。HOG描述图像的局部边缘梯度信息,对小量的偏移和光照变化具有很好的鲁棒性,缺点是维度较高,以致其提取速度很慢,计算时间比较长,影响实时性[3]。
针对动态视频识别应用场景,有学者提出将前景提取与行人识别相结合从而提高行人检测速度的方法,该方法是采用现有的某种前景检测算法提取图像中的感兴趣区域(Region of Interesting,ROI),然后在此区域中通过HOG特征进行行人识别[4-5],该方法能够提高行人检测速度。常用的前景检测方法有:背景差分法[6]、帧间差分法[7]、光流法[8]、混合高斯背景建模法[9]、视觉背景抽取法(Visual Background Extractor,ViBe)[10]等。背景差分法和帧间差分法在复杂的环境中适应性不强,光流法计算复杂度较高,而应用较为广泛的混合高斯背景建模法也存在计算复杂、不适应变化较快的背景等问题。ViBe方法是一种高效的像素级背景建模算法,运算速度快且具有较强的鲁棒性[11]。然而ViBe方法存在以下3个缺点:1)该方法对由静转动的目标存在“鬼影”现象;2)在室外噪声场景下存在不规则闪烁像素点(树枝摇摆等噪声导致),对前景检测结果造成干扰[12];3)对于光线突变等较大程度的背景变化存在背景模型更新速度较慢、适应性不强的问题。
文献[13-14]利用帧差与ViBe这2种方法共同检测前景目标,快速去除ViBe产生的“鬼影”。文献[15]采用三帧差分法对视频进行预处理,避免鬼影的产生。文献[16]通过统计像素帧差的时域变化判断鬼影像素,提高消除鬼影的速度。然而以上方法在检测行人目标时,目标的完整度会受到影响,从而会进一步影响基于HOG的行人识别结果。
为了减弱闪烁像素的影响,文献[17]提出通过检测像素点是否经常在前景与背景之间切换来判断其是否为闪烁像素。该方法容易将行动缓慢的行人前景目标的边缘像素误判为闪烁像素。文献[18]提出通过形态学操作来处理闪烁像素噪声,然而该方法在消除闪烁像素噪声的同时,也提高了将前景目标部分有效区域消除的概率,影响行人识别准确率。
为了提高在复杂环境中的检测准确度,文献[19]提出自适应参数法,根据每个像素点背景模型的标准差,动态设置每个像素的阈值。但这个方法的计算量太大,检测速度很慢。
在以上学者研究的基础上,本文提出一种基于改进ViBe的室外行人检测方法,该方法在前景提取过程中采用基于区域的改进ViBe更新策略,并采用背景差的方法过滤复杂多变背景导致的误报区域,最后在此基础上进行策略性的行人识别,该方法充分结合了前景提取与行人识别方法的优势,在室外复杂场景行人检测中具有较高的准确率和鲁棒性。
1 相关工作
1.1 ViBe算法
ViBe算法由以下3个步骤组成:背景模型初始化、背景模型更新和前景检测。
1.1.1 背景模型初始化
首先根据视频第一帧图像建立ViBe背景模型:对第一帧图像的每个像素x根据一定规则选取样本点,从而建立样本集Mt(x)。样本点的选取规则为,随机选择该像素及其邻域的像素共N个,第i个样本值用vi表示,则x的样本集Mt(x)表示如下:
Mt(x)={v0,v1,…,vN-1}
(1)
1.1.2 背景模型更新
ViBe算法中当某个像素点被检测为背景时,它有一定几率更新背景模型。
首先该点有1/φ的概率更新到该点对应的背景模型样本集Mt(x)中,其次,出于像素点空间传播特性的考虑,该点同样有1/φ的概率更新到其领域点对应的背景模型样本集中。
以上的背景模型样本集更新采用随机选择的方法,概率为1/φ(其中φ为视频采样率),那么在经过时间dt后,该样本依然保留在背景模型中的概率[11]为:
(2)
可以看到该样本依然保留在背景模型中的概率呈指数递减,样本点的更新与时间无关,这种无记忆的保守更新策略有利于提高背景模型的适应性。
1.1.3 前景检测
当前帧与背景模型比较的过程如图1所示,计算x的像素值v(x)与背景模型样本集中每一个样本vi之间的距离,若该距离小于半径R,则认为v(x)与背景模型样本点vi匹配。最后通过匹配的样本个数若大于设定的阈值#min则判断v(x)为背景,反之则为前景。
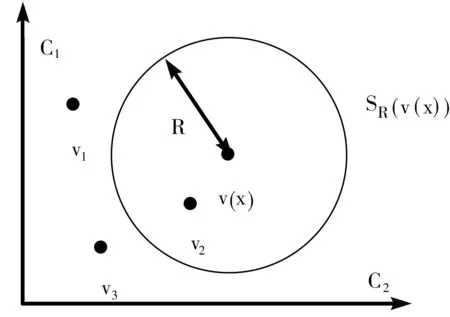
图1 前景检测对比模型图
1.2 行人检测基本原理
HOG特征描述的是图像的边缘轮廓特征,是比较有效的行人特征描述方式,其提取方法包括以下步骤:
步骤1标准化伽马空间和颜色空间;
步骤2计算像素梯度;
步骤3将梯度投影到单元格的梯度方向;
步骤4将所有单元格在块上进行归一化;
步骤5生成HOG特征向量。
将以上步骤产生的HOG特征向量引入到SVM分类器中,即可进行行人识别。
SVM分类器的主要思路是利用核函数将向量与高维空间形成一定的映射关系,在这个高维空间中,找到能够使不同类别样本之间的距离最大的超平面。支持向量机的核心就是找到能使2类样本距离最大化,并保证错分样本最小化的超平面。
2 本文算法
2.1 算法流程
本文设计了能够适应室外复杂环境的行人检测方法,算法的流程如图2所示。

图2 算法流程图
1)输入视频序列,压缩视频帧。
采用双线性插值法将视频画面尺寸压缩为720×480的D1标准帧图像,后续算法均在此D1标准帧图像上进行,减少算法的计算时间。
2)ViBe检测、帧差检测。
分别采用ViBe前景检测方法以及帧间差分前景检测方法对当前帧进行前景检测,得到2种检测方法的前景目标区域结果。
3)基于区域的背景更新。
采用本文提出的基于区域的改进ViBe更新策略,整合2种检测方法的前景检测结果,并更新算法背景模型。首先综合2种前景检测结果的区域与时域变化,对像素类别进行标注;然后采用自适应参数策略,对ViBe背景模型进行更新。
4)基于背景差的前景目标筛选。
室外场景复杂多变,在前景目标检测结果中容易出现误报区域,本文采用基于背景差的方法对ViBe前景目标检测结果进行筛选,得到当前帧最终的前景目标检测结果。
5)对前景目标进行跟踪。
采用高效且高精度的meanshift方法,对当前帧的前景目标进行跟踪。
6)判断当前帧的每一个前景目标跟踪对象是否满足算法实时性策略逻辑规则(规则详见2.4节),如果满足则对其进行行人检测,即从前景目标区域中提取HOG特征,并利用SVM分类器对HOG特征进行行人检测。
本文采用如上算法对室外复杂环境的视频进行行人检测,该算法主要在2个方面进行创新:1)在前景检测与更新过程中,采用基于区域的改进ViBe更新策略,该策略在加快鬼影消除速度的同时,提高了行人目标提取的完整度;2)在ViBe前景检测之后,算法采用基于背景差的方法对ViBe前景检测结果进行过滤,最终得到的前景目标检测结果在一定程度上降低了复杂多变背景导致的误报区域。最后本文算法为保证实时性,通过相应的实时性策略进行算法提速,在室外复杂场景具有较高的准确率和鲁棒性。
2.2 基于区域的改进ViBe更新策略
ViBe是基于样本的背景模型,在背景建模和背景更新时引入了随机选择机制,使背景中样本的生命周期更符合实际分布规律,降低了算法计算量,提高了目标的检测速度和检测精度。
但是当视频中存在由静转动的运动目标时,ViBe会在前景检测中将鬼影(鬼影是一组连接点的集合,它在运动中被检测到,但是不对应于任何真正移动的对象[20])误检为前景目标。
为加快鬼影消除的速度,许多学者尝试将帧差方法与ViBe方法相结合:
1)基于帧间差(或三帧差)与ViBe共同检测行人目标。例如,文献[13-14]采用帧差与ViBe方法共同检测前景目标,文献[15]采用三帧差法进行预处理,避免鬼影形成。然而行人目标的颜色通常较为单一,且运动速度不定甚至存在在小范围区域徘徊的现象。基于帧差的行人目标提取方法容易产生内部空洞甚至边缘不完整的情况,虽然对三帧差分法进行了一定改进,但针对行人目标的检测仍然存在问题。基于帧间差(或三帧差)与ViBe共同检测行人目标的结果并不理想。
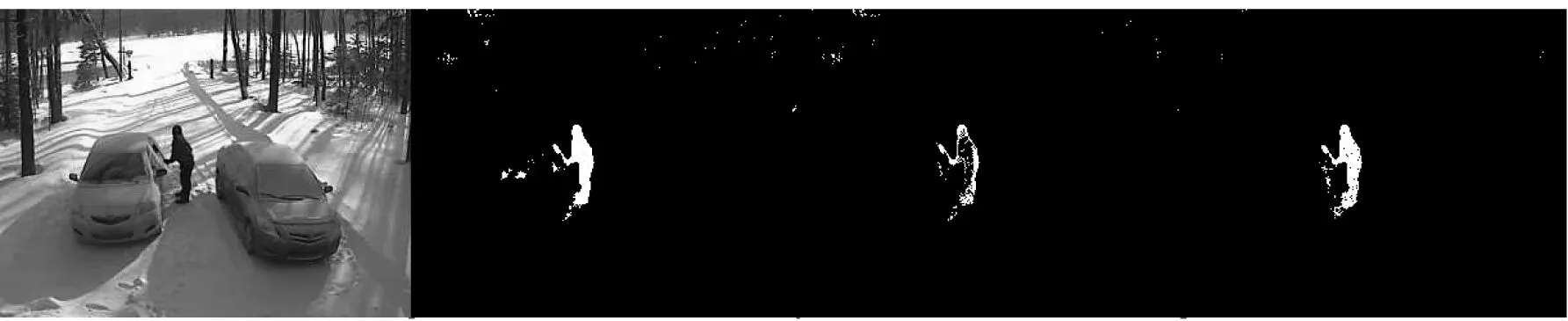
2)基于帧间差统计判断鬼影像素。例如,文献[16]就是通过统计像素帧差的时域变化判断鬼影像素,ViBe算法将会加快“判断为鬼影的像素”的背景模型更新速度。然而当帧差提取目标不完整时,真正前景的部分像素会被误判为鬼影,导致前景目标边缘消融甚至大量渗入背景像素的现象。如图3所示,为Wallflower数据集的MovedObject场景中的帧差结果,图3(a)为行人快速运动的帧差结果(第645,646帧差结果),图3(b)为行人缓慢运动的帧差结果(第655,656帧差结果),图3(c)为行人徘徊运动的帧差结果(第659,660帧差结果)。

(a) 行人快速运动结果 (b) 行人缓慢运动结果
(c) 行人徘徊运动结果图3 行人帧差检测结果图
行人目标边缘提取不完整会影响基于HOG的行人识别结果。因此本文提出基于区域的改进ViBe更新策略,该方法充分结合时间和空间的信息,在提高鬼影消除速度的同时保证行人目标的完整性。
2.2.1 基于区域与时域变化的像素类别标注
文献[16]中判断鬼影的方法为:如果某前景像素的前后2帧差值超过预设阈值时则对其进行统计,如果该现象连续发生超过预设次数时,则判断其为鬼影像素。该方法统计单像素的时域变化,与邻域扩散策略结合使用,能够提高鬼影消除的速度。然而在检测行人目标时,由于行人速度不定且存在在小范围区域徘徊的现象,单个像素的统计方法容易造成误判,当前景目标中的部分像素被误判为鬼影像素时,结合ViBe的邻域扩散策略,这种误判的影响范围会逐渐扩大,从而进一步影响行人目标检测的完整性。
本文受文献[16]启发,结合行人检测的实际情况,提出基于区域和时域变化的像素类别标注方法。具体方法如下:
Ft为视频中第t帧,Gt为第t帧ViBe前景检测结果,对其进行连通域检测、丢弃过小连通域,得到ViBe前景区域图Ht。
(3)
Jt为第t帧与第t-1帧的帧间差分前景检测结果,对其进行连通域检测、丢弃过小连通域,得到帧差前景区域图Kt。
(4)
结合ViBe与帧差的前景区域检测结果,得到像素类别标注结果Lt。
(5)
此外,对于从Ht与Kt中提取的连通域,要在其四周增加10%的区域。这是因为行人目标存在徘徊现象,其边缘区域易被判断为鬼影,扩大连通域范围可以防止基于邻域扩散的更新策略将行人目标边缘消融。
2.2.2 应用自适应参数的更新策略
传统的ViBe方法采用如下更新策略:在判断像素为前景状态时不更新,在判断像素为背景状态时采用固定概率1/φ更新。然而如上文所述,本文将像素状态分为3种:前景状态、背景状态以及鬼影状态。像素处于某种状态以及像素在不同状态之间切换时均要有不同的更新方式,因此本文提出自适应参数的更新策略如下:
为每个像素x设置一个计数器T(x),初始化为0,当检测像素为前景状态时清零,当检测像素为鬼影状态时加1计数,当检测像素为背景时减10计数(T(x)不小于0),该过程用式(6)表示:
(6)
根据像素的状态采用的更新策略如表1所示。
表1 应用自适应参数的更新策略
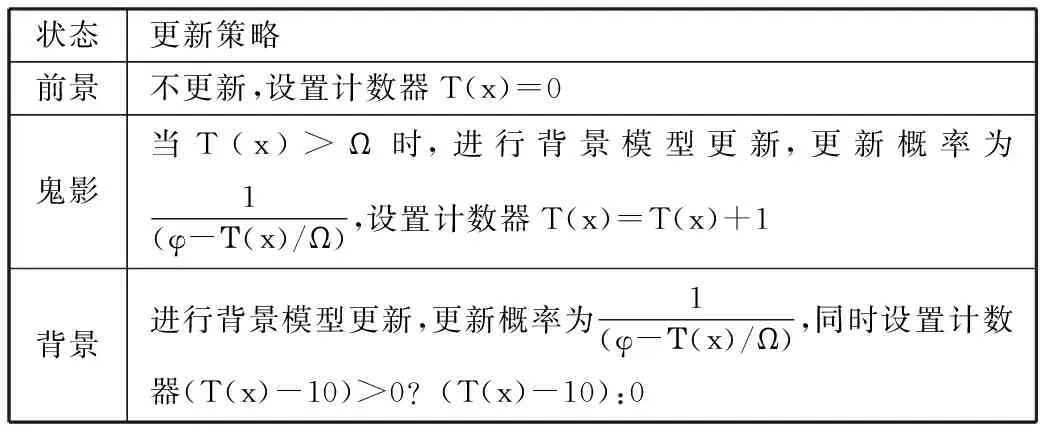
状态更新策略前景不更新,设置计数器T(x)=0鬼影当T(x)>Ω时,进行背景模型更新,更新概率为1(φ-Τ(x)/Ω),设置计数器T(x)=T(x)+1背景进行背景模型更新,更新概率为1(φ-Τ(x)/Ω),同时设置计数器(T(x)-10)>0?(T(x)-10):0
该更新策略既能够在判断像素为鬼影状态后加快鬼影消除的速度,也能够自适应各个状态之间的切换,防止鬼影误判像素的邻域扩散,防止背景渗入到前景中,保证行人检测的完整性。
2.3 基于背景差的前景目标筛选方法
室外场景环境复杂,存在不规则闪烁像素,且背景环境会发生较大变化,例如树枝大幅度摇晃、光线突变等,当这些复杂噪声大量地出现时,由于ViBe采用的是保守更新策略,无法迅速适应这种变化,会对前景检测结果造成干扰,因此仍需要其他机制对检测到的前景目标做进一步筛选。
本文在前景检测过程中采用基于背景差的方法进行筛选,以提高算法对复杂背景的适应性,该方法包括背景帧的初始化、背景帧的更新和背景差分图的计算及前景目标筛选3个部分。
2.3.1 背景帧的初始化
背景帧如果采用第一帧初始化则存在引入鬼影的风险,因此应采用多帧平均计算法得到的平均图A进行初始化,同时创建背景帧更新掩码mt。
对视频前P帧进行多帧平均计算得到平均图A,如式(7)所示:
(7)
2.3.2 背景帧的更新
从第P+1帧开始计算背景帧更新掩码mt:
(8)
此处x判断为前景或背景的依据,来自基于改进ViBe的前景目标提取结果。
然后根据更新掩码对背景帧进行更新:
(9)
其中,Bt-1为前一帧的背景帧,Ct为最新Q帧图像的平均帧,其计算方法如式(10)所示:
(10)
2.3.3 背景差分图的计算及前景目标筛选
首先计算背景差分图,如式(11)所示:
Dt(x)=|Ft(x)-Bt(x)|
(11)
背景差分图计算结果如图4所示。

(a) 原图 (b) 背景帧图
(c) 整图的背景差分图图4 背景差分图的计算实例图
前景目标的筛选采用基于Otsu的方法,Otsu是一种高效的计算图像分割阈值的方法,该方法基于最大类间原理,背景差分图中前景目标与背景的大小比例悬殊时,Otsu计算得到的阈值普遍较低,因此可以利用该方法判断背景差分图中是否存在明显前景目标。
2.4 算法实时性策略
目前最广泛的行人检测采用的是HOG特征与SVM相结合的算法,该算法在场景简单的MIT行人数据库上检测率近乎100%,在背景较为复杂的INRIA行人数据上检测率大约90%[16]。然而其时间复杂度较高,影响实时性,本文从实用性角度采用以下3个方面的提速方式:
1)在算法执行之前对视频进行压缩处理;
2)在更新过程中,不再对每一个像素均进行帧间差分计算,而是根据ViBe的检测结果有选择地进行帧差计算;
3)不再对前景目标跟踪对象的每一个前景检测结果都进行行人检测,而是采用一定的逻辑规则选择性地进行检测。一方面行人检测次数的减少可以较大幅度地提高算法实时性,另一方面根据一定的逻辑规则有选择地执行行人检测,能够保障跟踪目标的行人检测准确率。逻辑规则设计如下:
规则1对于前景目标的前Y帧持续执行行人检测;
规则2从前景目标的Y+1帧开始,以ω的频率间歇执行行人检测;
规则3当一个前景跟踪对象的“累计成功检测行人个数”达到阈值后,判断该跟踪对象为行人,即可停止执行行人检测。
3 实验及分析
本文算法实验环境如下:处理器为Intel(R) Core(TM) i5-4590 CPU@3.30 GHz;内存为8 GB;系统类型为64位;操作系统为Windows 7;运行环境为VS2008以及Opencv2.4.7。
本文算法中采用的参数:背景模型中样本个数N=8;前景检测v(x)跟样本vi的比较阈值R=20,前景检测样本匹配阈值#min=2;视频采样率φ=16;更新自适应阈值Ω=50;背景帧初始平均帧数P=15;背景帧更新所需帧个数Q=10帧;前景行人识别逻辑阈值Y=16,频率ω=3;“累计成功检测行人个数”为3;前景筛选中的“前景判断阈值”为30。
3.1 基于区域的改进ViBe更新策略实验
为了验证在行人目标提取过程中,基于区域的更新策略对鬼影区域消除以及徘徊行人提取的性能,本文采用文献[16]提到的ChangeDetection数据集(来自http://www.changedetection.net)中的intermittentObjectMotion-winterDriveway场景进行实验。详细实验结果如图5所示。

(a) 第379帧结果对比图
(b) 第520帧结果对比图
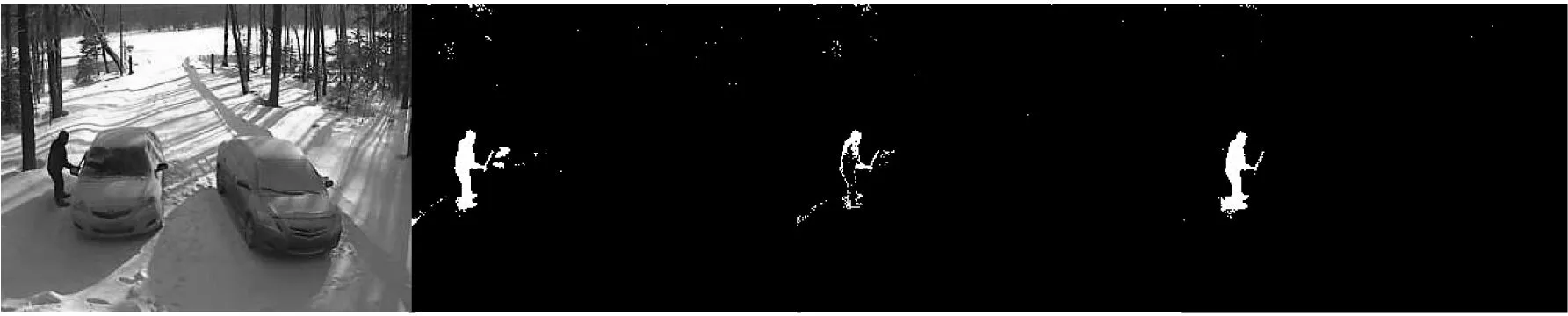
(c) 第1028帧结果对比图

(d) 第1839帧结果对比图
(e) 第1969帧结果对比图

(f) 第2015帧结果对比图
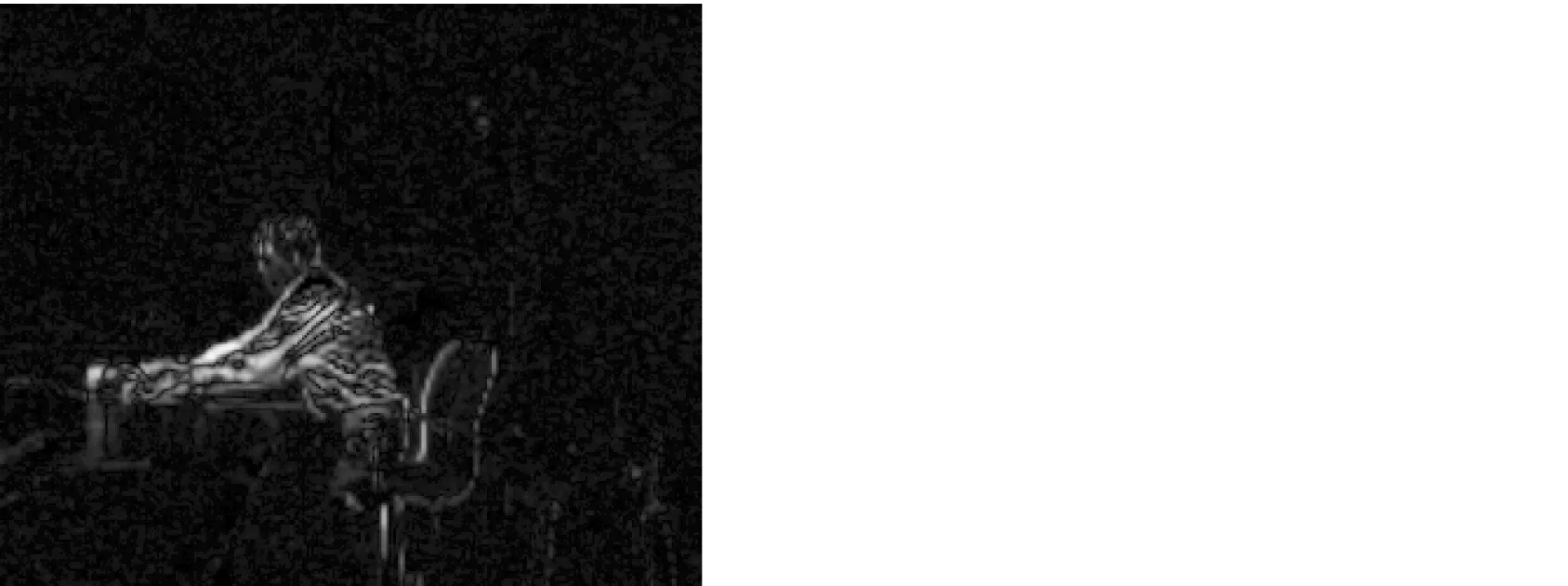
由图5的检测结果可以看出:第379帧,鬼影包括早已出现的车辆雨刷移动鬼影以及刚刚出现的车辆前门移动鬼影,ViBe方法的处理结果中早已出现的雨刷鬼影像素仍然大量存在,文献[16]改进ViBe方法的处理结果中雨刷鬼影像素消失了一部分,本文方法的处理结果中雨刷鬼影像素几乎完全消失;从第379帧至第1028帧,行人目标在车辆周围徘徊扫雪,其中车辆被扫掉的雪为鬼影,徘徊的行人为前景,第520帧和第1028帧中,ViBe方法均将被扫掉的雪、行人目标检测为前景,文献[16]改进ViBe方法均已将“被扫掉的雪导致的鬼影”消除了,但同时也让大量的背景渗入到行人前景中,本文方法则在将“被扫掉的雪导致的鬼影”消除的同时,保持了比文献[16]改进ViBe方法更高的行人目标完整度;第1839帧,车辆离开产生鬼影,ViBe、文献[16]改进ViBe方法、本文方法均需要开始消除鬼影,第1969帧,ViBe方法的处理结果中仍然存在大量的车辆鬼影像素,文献[16]改进ViBe方法的处理结果中车辆移动鬼影像素消除了很多,本文方法的处理结果中车辆移动鬼影像素消除最多;第2015帧,本文方法已经将鬼影基本消除,文献[16]改进ViBe略有鬼影残余,ViBe方法仍有大量鬼影。通过实验可以看出,本文方法在行人目标提取过程中,提高了鬼影消除速度的同时,也提高了行人目标提取的完整度。
3.2 基于背景差的前景目标筛选实验
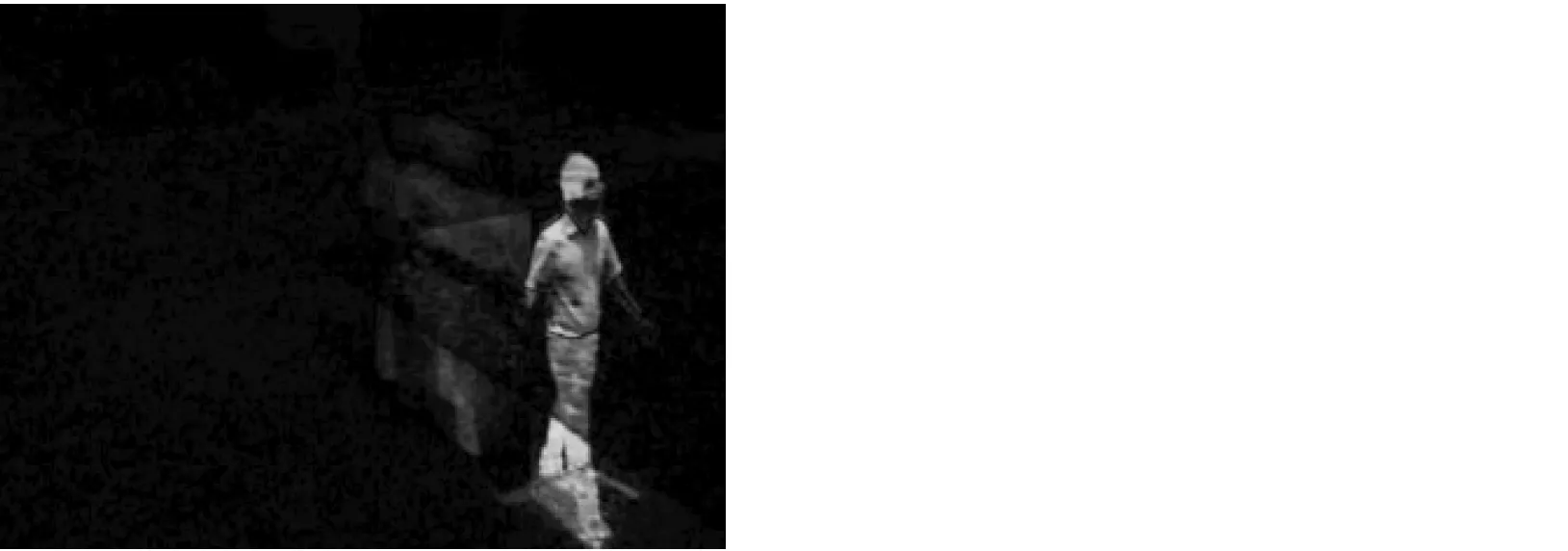
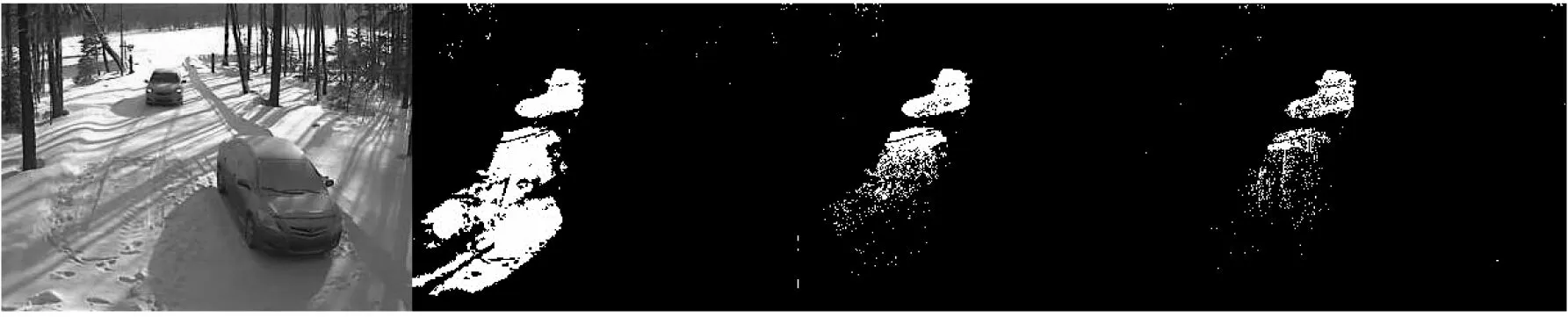
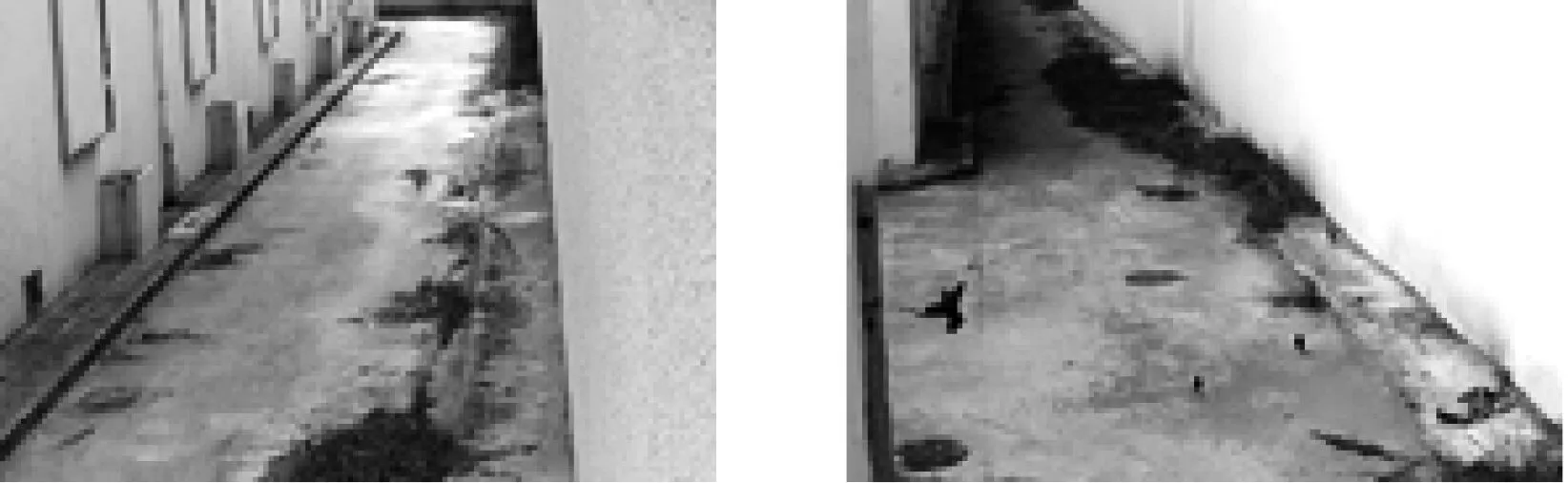
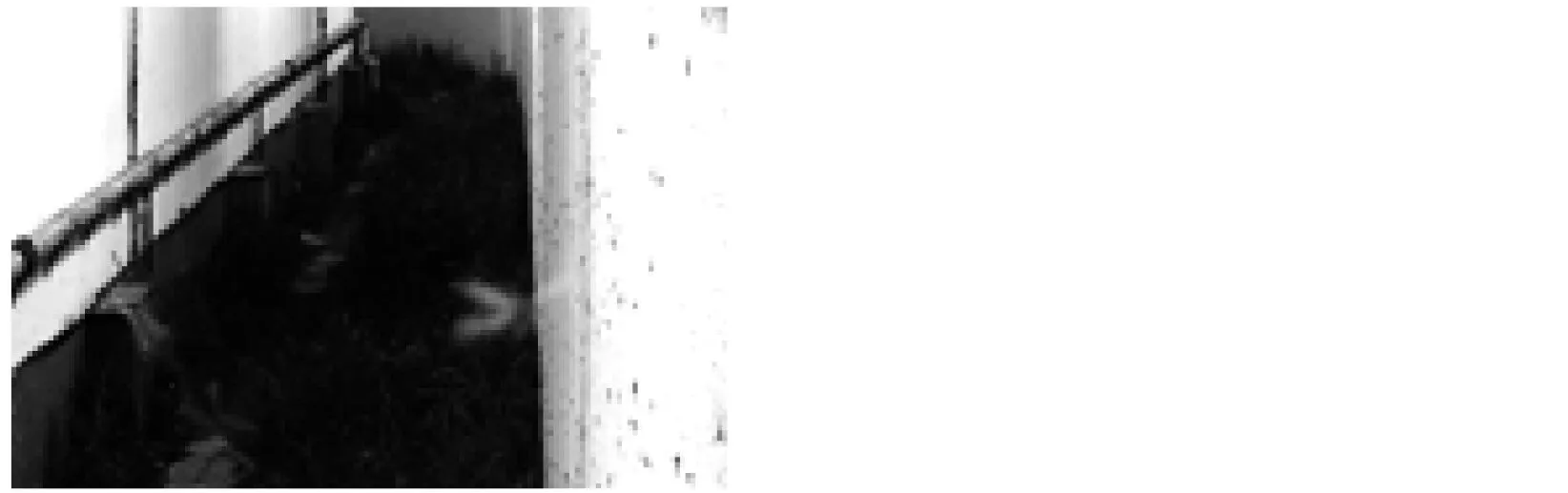
为了验证本文提出的前景目标筛选方法对复杂背景变化的适应性,本文首先进行直观的实验图对比分析。本文选取了2组室外复杂场景的视频:第一个视频为有行人经过的视频;第二个视频为复杂场景(存在光照变化、草叶摇摆等现象)的视频,详细实验结果如图6所示。
(a) 一视频原图 (b) 二视频原图

(c) 一视频前景检测 (d) 二视频前景检测

(e) 一视频背景差分图 (f) 二视频背景差分图
如图6所示,左侧为行人视频测试结果,右侧为复杂场景视频测试结果。当有行人经过时,改进ViBe算法的前景检测结果如图6(c)所示,按照本文所提的背景差分图计算方法得到有明显前景目标的图6(e),该图能够通过基于Otsu的前景筛选。而对于复杂场景视频,虽然其前景检测结果图6(d)中存在大量的误报区域,但是其背景差分图6(f)中并无明显前景目标,该误报区域无法通过基于Otsu的前景目标筛选。
其次,本文在公开数据集中进行精确的指标评价,采用精确率和召回率作为算法结果的评价指标。
精确率P:
(12)
TP为检测正确的前景目标个数,FP为检测错误的前景目标个数,即被检测为前景的背景目标个数,因此TP+FP为检测到的前景目标个数。
召回率REC:
(13)
FN为检测错误的背景目标个数,即被检测为背景的前景目标个数,因此TP+FN为全部的前景目标个数。
表2、表3为本文提出的改进ViBe算法与文献[16]的改进ViBe算法的实验对比结果,该实验的测试视频为ChangeDetection数据集中的dynamicBackground-fountain02场景,该视频场景中包括喷泉、树叶、水波等动态背景。
表2 文献[16]算法与本文算法的精确率
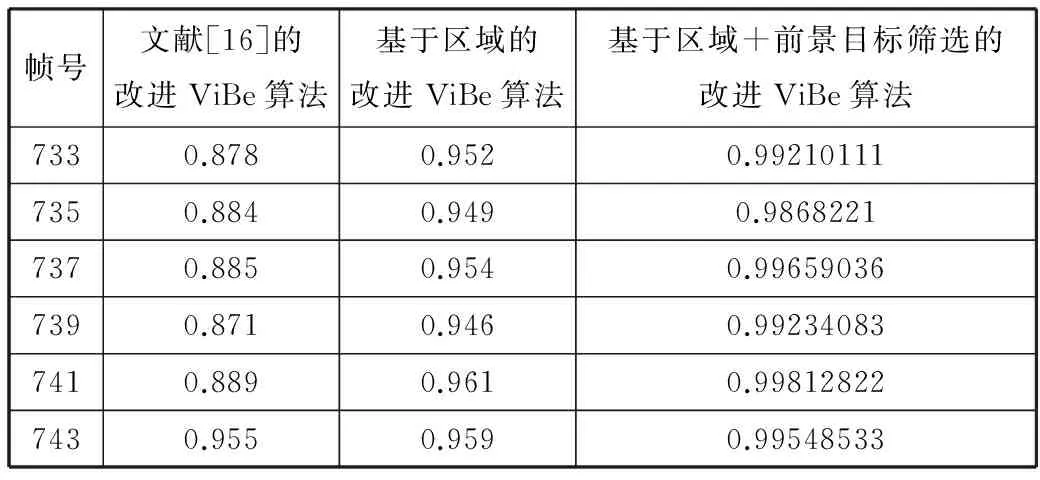
帧号文献[16]的改进ViBe算法基于区域的改进ViBe算法基于区域+前景目标筛选的改进ViBe算法7330.8780.9520.992101117350.8840.9490.98682217370.8850.9540.996590367390.8710.9460.992340837410.8890.9610.998128227430.9550.9590.99548533
表3 文献[16]算法与本文算法的召回率

帧号文献[16]的改进ViBe算法基于区域的改进ViBe算法基于区域+前景目标筛选的改进ViBe算法7330.6340.7710.7692947350.6390.7820.7822427370.6470.7990.7992197390.6450.8040.8041127410.6480.8050.8055147430.6440.7970.797468
由此可见本文提出的改进ViBe算法与文献[16]的改进ViBe算法相比在精确率和召回率上均具有一定的提升。且通过表2、表3可以看出基于背景差的前景目标筛选方法能够在召回率变化很小的情况下,在一定程度上减少复杂场景导致的误检,提高其精确率。
表4、表5为本文提出的改进ViBe算法在dynamicBackground中overpass,canoe等其他测试视频中的测试统计结果。
表4 本文算法在其他数据集的精确率

数据集基于区域的改进ViBe算法基于区域+前景目标筛选的改进ViBe算法overpass0.7280.958canoe0.5790.904
表5 本文算法在其他数据集的召回率

数据集基于区域的改进ViBe算法基于区域+前景目标筛选的改进ViBe算法overpass0.7310.726canoe0.5100.503
由结果可以看出,本文所提出的改进ViBe算法在其他复杂场景中具有类似性能。
3.3 基于改进ViBe的室外行人检测方法性能分析
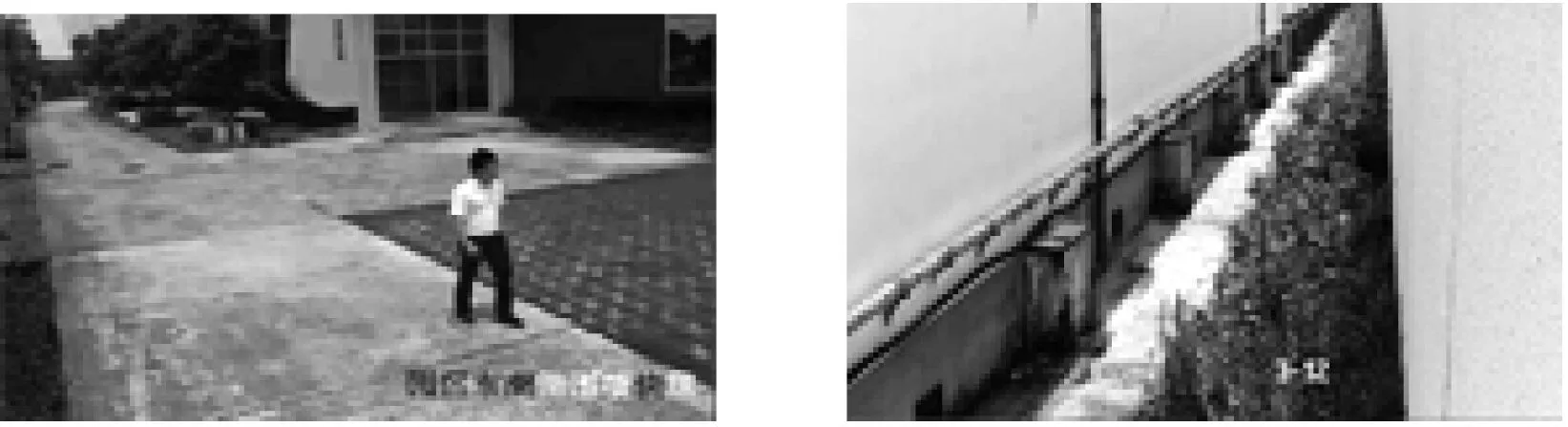
为验证本文算法综合性能,本文首先实现基于文献[16]改进ViBe的行人检测算法(以下简称文献[16]算法),将本文与文献[16]算法分别从准确率和实时性方面进行对比。由于本文研究的目标为室外复杂场景下的行人检测,因此算法的长期性能测试所用视频为如图7所示的3个场景的室外监控视频,分辨率为1280×720,时长为5×24 h,该视频中的环境干扰包括:光照变化(日出、日落以及中午期间的光照突变)、草丛摆动、小动物经过(尤其是夜间飞虫)等。
(a) 光照变化场景图 (b) 飞鸟场景图
(c) 草丛摆动以及飞虫场景图图7 实验视频场景图
表6为本文算法准确率对比结果。
表6 本文算法准确率对比 /%

所用算法漏警率虚警率文献[16]算法9.7454.70本文算法6.868.64
图8为本文算法实时性对比结果。
数据来自有行人经过的某100帧视频片段,图8横坐标为帧号,纵坐标为单帧执行时间,单位为s。
4 结束语
本文提出了一种基于改进ViBe的室外行人检测方法,该方法首先采用基于区域的改进ViBe更新策略,该策略在加快鬼影消除速度的同时提高了行人目标提取的完整度,然后采用基于背景差的方法对前景检测结果进行筛选,增强了ViBe前景检测对复杂多变环境的适应性,在一定程度上降低了光照突变、树枝摇晃等背景变化的干扰。此外,由于该方法采用计算速度较快的ViBe方法,并在行人检测环节按照一定的逻辑规则选择性执行,降低了无意义的行人检测次数,提高了算法的执行速度。实验结果表明,该方法在复杂的室外场景中,能够有效地对视频中的行人进行检测,同时能够较大幅度地降低光照突变、树枝摇摆等环境噪声引起的误报率,具有较高的鲁棒性和实时性。
[1] 黄凯奇,陈晓棠,康运锋,等. 智能视频监控技术综述[J]. 计算机学报, 2015,38(6):1093-1118.
[2] Dalal N, Triggs B. Histograms of oriented gradients for human detection[C]// Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. 2005:886-893.
[3] 朴春赫,潘怡霖,赵海,等. 基于改进ViBe的多行人检测方法[J]. 东北大学学报(自然科学版), 2016,37(4):481-485.
[4] 张慧,郑爱华,涂铮铮,等. 基于背景差与HOG-LBP的快速运动人体检测[J]. 计算机技术与发展, 2015,25(2):47-51.
[5] 汪成亮,周佳,黄晟. 基于高斯混合模型与PCA-HOG的快速运动人体检测[J]. 计算机应用研究, 2012,29(6):2156-2160.
[6] Tekalp A M. Digital Video Processing[M]. Pearson Education, 2015.
[7] Haritaoglu I, Harwood D, Davis L S. W4: Who? When? Where? What? A real time system for detecting and tracking people[C]// Proceedings of the 3rd International Conference on Face & Gesture Recognition. 1998:222-227.
[8] Papenberg N, Bruhn A, Brox T, et al. Highly accurate optic flow computation with theoretically justified warping[J]. International Journal of Computer Vision, 2006,67(2):141-158.
[9] Stauffer C, Grimson W E L. Learning patterns of activity using real-time tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000,22(8):747-757.
[10] Barnich O, Droogenbroeck M V. ViBe: A powerful random technique to estimate the background in video sequences[C]// 2009 IEEE International Conference on Acoustics, Speech and Signal Processing. 2009:945-948.
[11] 吴建胜,徐博. 动态阈值的Vibe运动目标检测[J]. 计算机工程与应用, 2017,53(11):182-186.
[12] Tajbakhsh T, Grigat R R. Illumination flicker frequency classification in rolling shutter camera systems[C]// Proceedings of the 9th IASTED International Conference on Signal and Image Processing. 2007:288-293.
[13] 赵光明,韩光,李晓飞,等. 基于融合帧间差的改进Vibe方法[J]. 计算机技术与发展, 2015(3):76-80.
[14] 吴剑舞,翁玲瑜,童怀. 一种基于改进ViBe的运动目标检测方法[J]. 计算机与现代化, 2015(7):50-54.
[15] 仇春春,王恬,程海粟,等. 基于改进ViBe算法的行人目标检测[J]. 信息技术, 2016(3):6-9.
[16] 徐久强,江萍萍,朱宏博,等. 面向运动目标检测的ViBe算法改进[J]. 东北大学学报(自然科学版), 2015,36(9):1227-1231.
[17] Manzanera A, Richefeu J C. A new motion detection algorithm based on Σ-Δ, background estimation[J]. Pattern Recognition Letters, 2007,28(3):320-328.
[18] 孙水发,覃音诗,马先兵,等. 室外视频前景检测中的形态学改进ViBe算法[J]. 计算机工程与应用, 2013,49(10):159-162.
[19] Droogenbroeck M V, Paquot O. Background subtraction: Experiments and improvements for ViBe[C]// 2012 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). 2012,71(8):32-37.
[20] Joshi K A, Thakore D G. A survey on moving object detection and tracking in video surveillance system[J]. International Journal of Soft Computing & Engineering, 2012,2(3):44-48.
