基于一维最大熵的视频图像运动背景减除
2018-03-29李亚,王颖
李 亚,王 颖
(北京化工大学信息科学与技术学院,北京 100029)
0 引 言
基于视频图像的智能监控已经应用到城市交通、机场、人体动作分析等多个领域,通过减除视频图像的背景,实现运动目标跟踪、监控、报警以及行为分析等[1]。视频图像背景减除分为恒定背景和运动背景这2类,主要方法有光流法、帧差法、背景建模法等[2]。光流法计算图像中每个像素点对应速度变化的光流矢量,利用运动目标与背景光流矢量的差异实现背景减除[1,3],运算量大,很难实现运动目标的实时检测。帧差法利用运动目标相对于背景的变化,基于OTSU法确定相邻帧的差分图像中运动目标和背景的分割阈值实现背景减除[4-5]。当运动目标灰度分布均匀时,相邻图像同一位置的目标灰度值接近,导致运动目标易被误检为背景使得目标出现空洞,连通性降低。背景减除法基于视频图像与建立的背景模型的差异实现目标检测。常用的背景建模用多个高斯模型描述视频图像每个像素点时域的灰度分布建立背景模型,对于运动背景,通过实时更新背景模型实现目标的检测[6-7],但是后续帧的背景被误判为运动目标,形成虚假运动目标即“鬼影”[8],为了消除鬼影,文献[9]基于当前图像与前帧图像前景区域灰度分布直方图之间的差异,通过寻找直方图匹配率最高的鬼影块消除鬼影,但是该方法需要图像前景目标的先验知识,局限性大,适用性较差;此外一些学者通过分段设置背景学习效率加快背景模型的更新速率,但建模运算量增大,时间成本提高,不利于实时目标检测[10]。
针对复杂及运动背景视频图像中高斯混合背景建模方法容易出现鬼影且鬼影难消除、误判率高和帧差法利用OTSU阈值法易将背景和目标误判等问题,本文基于图像信息熵[11]理论,将一维最大熵用于背景减除,实现运动目标的实时检测[12-13]。
1 一维最大熵背景减除方法
1.1 图像信息熵
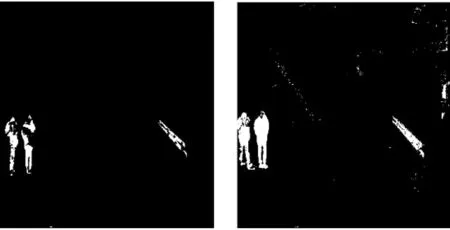
通过对减除背景后的视频图像确定阈值实现运动目标检测。对于复杂背景,为减少目标信息的误判,需要更精确的阈值确定方法。常用的OTSU阈值确定方法依据图像的灰度特性,以类间方差最大为准则确定阈值实现目标的检测[14-15],但当目标和背景灰度值接近时不能准确检测目标。图1(b)为OTSU阈值法对图1(a)目标检测结果,由于部分背景和目标灰度接近,导致被误判为目标。

(a) 待分割原图
(b) OTSU分割结果 (c) 一维最大熵分割结果图1 不同背景图像的OTSU阈值目标检测
信息熵表示从信息源中可能获得的信息量的大小。假设事件xi发生的概率为pi,其自信息量定义为:
(1)
自信息量的数学期望称为事件xi的信息熵,表示事件在不同发生概率时的信息量。待检测视频图像包含目标和背景这2种信息,因此对于每个像素都有目标x1和背景x2这2种可能,且每个像素对应目标和背景的概率满足p1+p2=1,该像素点的信息熵为:
H=-p1ln (p1)-p2ln (p2)
(2)
图2为p1与信息熵H的关系曲线。
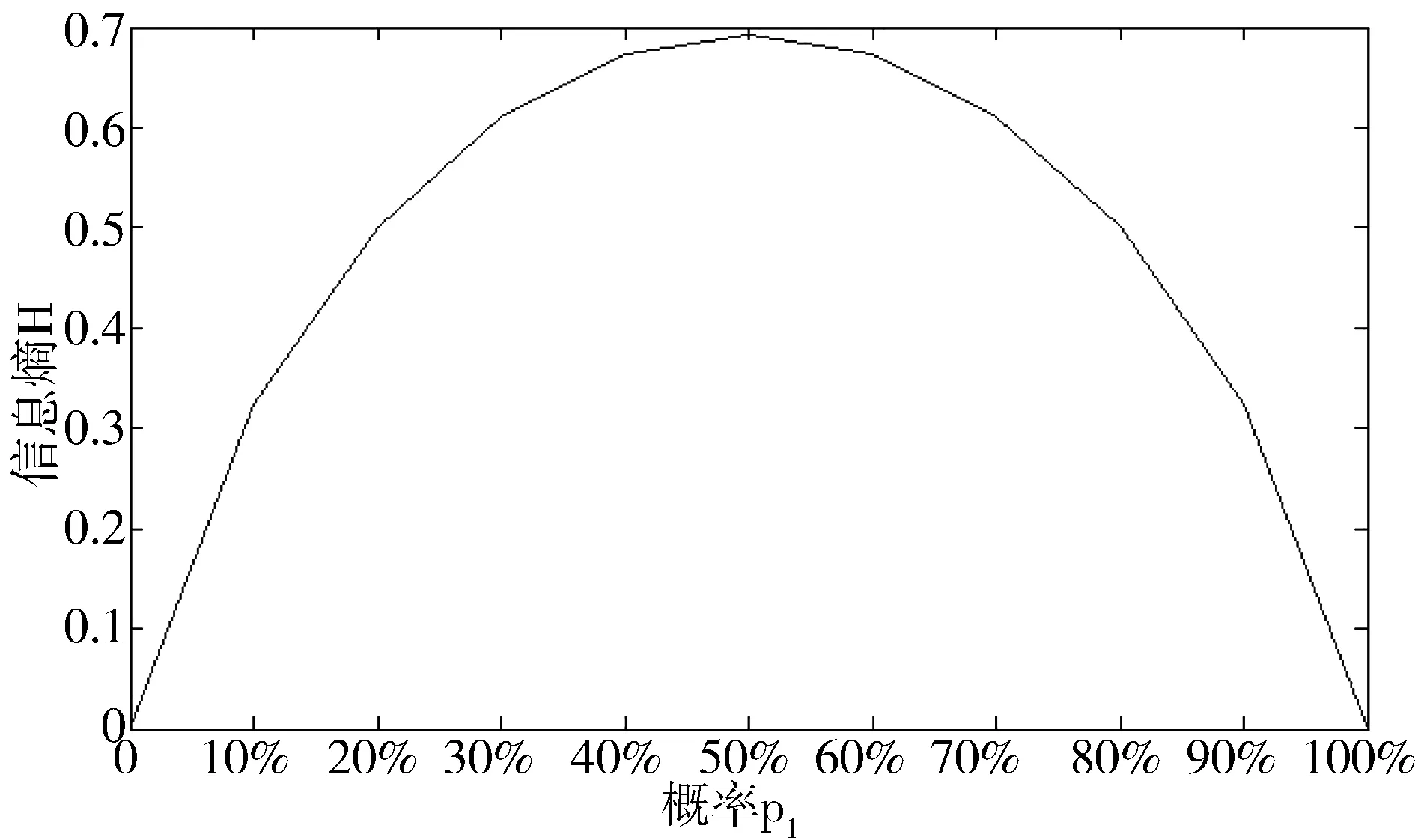
图2 信息熵与概率分布关系
从图2可看出像素点属于目标和背景的概率均等于50%时对应的信息熵最大,表明从当前像素点获取了最多的信息;当目标概率大于或小于50%时,信息熵呈下降趋势,表明从当前像素点获取的信息量变少。图像信息熵的和是把图像中所有像素点依据灰度值分为目标背景时目标信息熵和背景信息熵的总和。采用图像信息熵最大时对应的灰度阈值进行分割能够保留最多的目标信息。图1(c)为一维最大熵确定阈值检测出的目标,保留了较完整的目标信息。因此针对复杂和运动背景的视频图像,利用一维最大熵确定阈值实现运动目标检测。
1.2 最大熵阈值计算方法
统计每个灰度值像素点的个数以及概率,灰度值t把图像分为背景和目标,计算背景与目标中灰度值像素点的概率和W1,W2,分别得到背景信息熵与目标信息熵H1,H2,以背景和目标信息熵总和Hs最大时的灰度值t为最终的分割阈值。具体步骤如下:
1)设图像的灰度范围为[0,1,…,i,…,L-1],L=256,总像素个数为M×N,图像灰度级的概率分布为:
(3)
其中,ni表示灰度级为i的像素点个数。背景包含的像素点的灰度范围为[0,1,…,t],运动目标包含的像素点灰度范围为[t+1,…,L-1]。背景的灰度分布概率为:
(4)
2)运动目标的灰度分布概率为:
(5)
3)背景的信息熵为:
(6)
4)运动目标的信息熵为:
(7)
5)总信息熵为:
Hs(t)=H1+H2
(8)
t*=arg maxt∈THs(t)
(9)
其中,t*为图像具有最大信息熵时对应的灰度阈值,该阈值可以完整检测出运动目标,减少误判。
2 实验与结果分析
采用4 GB内存计算机,基于Visual Studio2010开发平台和OpenCV2.4.3编程环境,针对复杂和运动背景视频图像采用一维最大熵方法进行背景减除,并与其他方法进行比较。
2.1 复杂背景视频图像背景减除
选取加州大学计算机视觉与机器人研究实验室拍摄的一段停车场入口复杂背景视频进行运动目标检测,待检测运动目标为图像左侧的2个人。

(a) 原图 (b) 帧差法结果
(c) 高斯混合建模法结果 (d) 一维最大熵方法结果图3 复杂背景视频图像的背景减除结果
图3(a)为视频中截取的一帧图像,图3(b)为帧差法检测的运动目标,采用OTSU法确定阈值t=119。由于目标的衣服灰度比较均匀,导致目标信息被误判为背景,出现较多空洞。图3(c)为采用10个高斯模型进行高斯混合背景建模后的运动目标检测结果,背景固定不需要更新,建立的背景模型不能准确包含所有背景像素点,导致颈部和四肢等区域信息误判为背景形成空洞,同时高斯混合背景建模需要人为设定参数,适用性差。利用一维最大熵法检测的运动目标如图3(d)所示,阈值t=21,保证了检测目标的完整性。
选取最大连通面积、误判个数和误判率进行目标检测结果评价[16-17]。最大连通面积利用检测到的目标相连接像素数的总和评价目标的连通性;误判个数是目标误判为背景以及背景误判为目标的像素数总和,误判率利用误判个数在图像中的比例评价背景减除方法发生错判的概率。表1给出上述3种方法针对7帧视频图像的目标检测评价指标的平均值。
表1 不同背景减除方法的目标检测评价结果
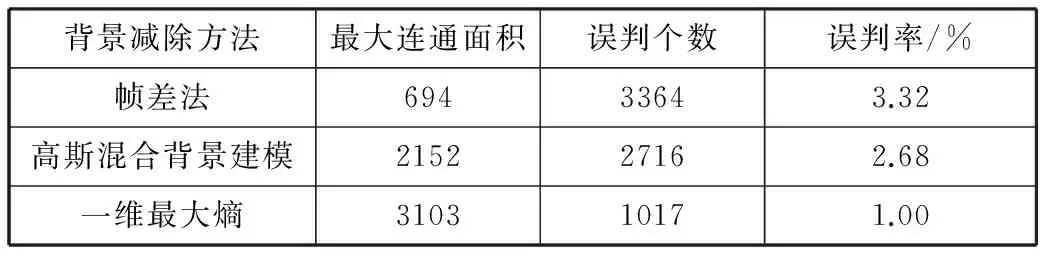
背景减除方法最大连通面积误判个数误判率/%帧差法69433643.32高斯混合背景建模215227162.68一维最大熵310310171.00
帧差法检测的目标连通域面积最小,目标连通性差,误判率高;高斯混合背景建模检测的目标连通域面积较大,但是误判率高;一维最大熵方法检测的目标连通区域面积最大,误判率最低。
2.2 运动背景视频图像背景减除
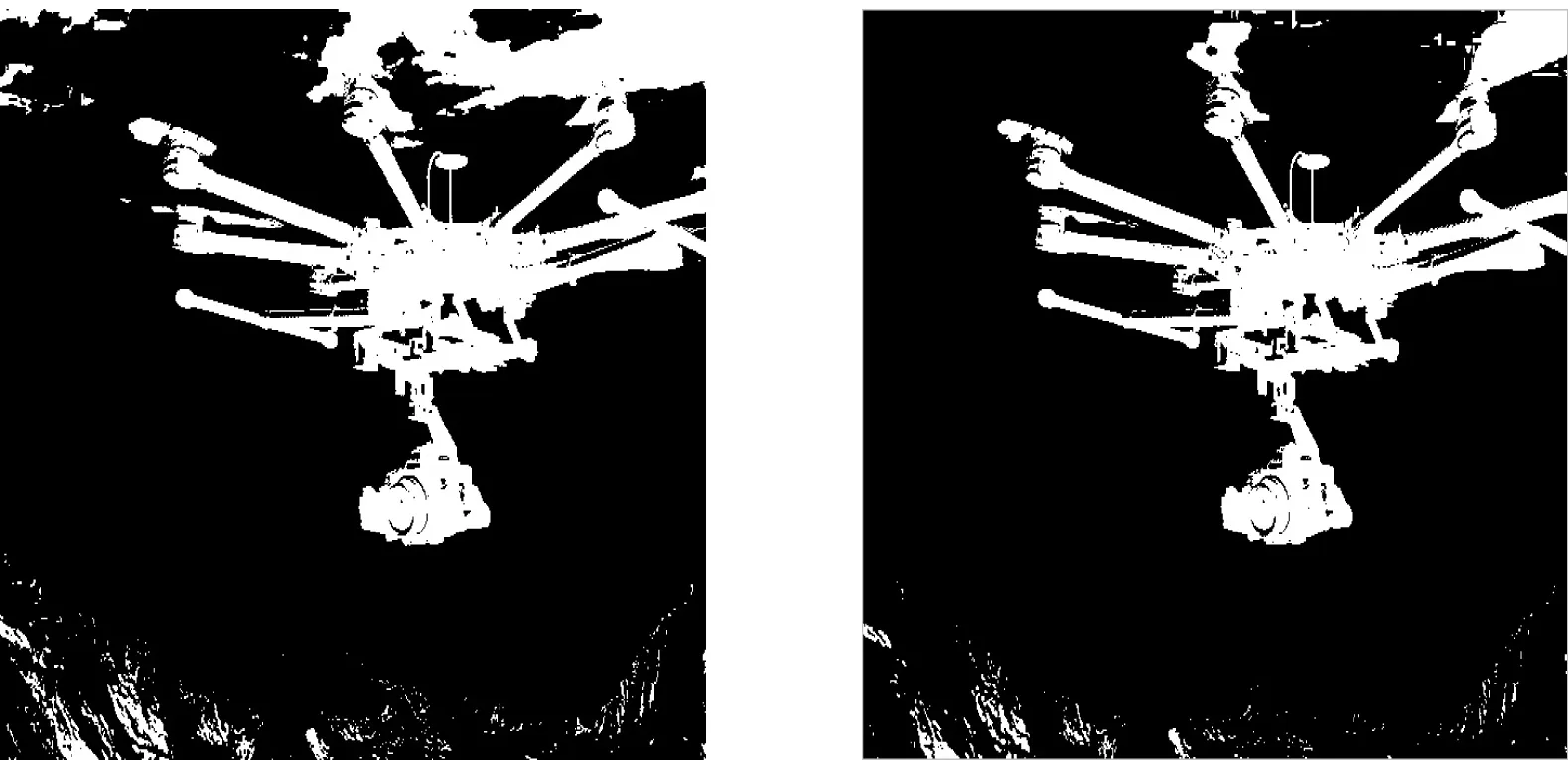
选取UCF视频库中一段50帧的跳水视频,该视频图像中待检测运动目标为跳水运动员,随着跳水运动员空间位置的变化背景不断变化,图4(a)和图4(b)为从中截取的2帧原始图像,对应背景分别是观众看台、游泳池水面。

(a) 原图1 (b) 原图2

(c) 高斯混合背景建模 方法结果1 (d) 高斯混合背景建模 方法结果2

(e) 改进高斯混合背景 建模方法结果1 (f) 改进高斯混合背景 建模方法结果2
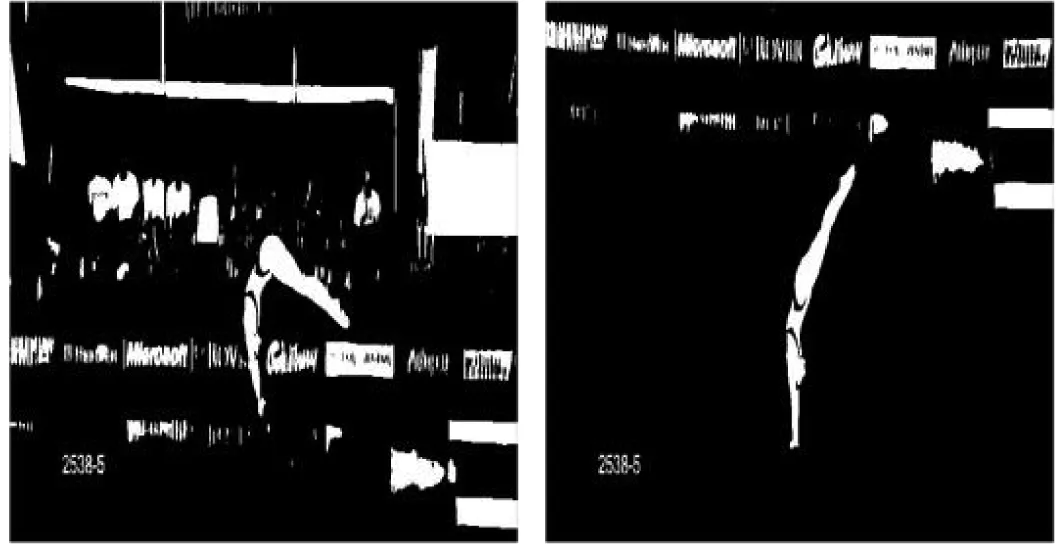
(g) 一维最大熵方法结果1 (h) 一维最大熵方法结果2
高斯混合建模在视频初始帧将运动员误判为背景,但是后续帧图像中该位置灰度变化较大,当学习效率较小时导致被误判为运动目标出现“鬼影”,见图4(c)和图4(d)中的圆圈标记。图4(e)和图4(f)是高斯混合背景建模方法改进后得到的目标,对视频分段设置不同的学习效率,前20帧学习效率较高,后续帧学习效率较低,由于采用分段学习提高了学习效率,鬼影消失,但是背景更新过快导致信息误判严重。图4(g)和图4(h)为采用一维最大熵的背景减除方法确定目标阈值检测的运动目标,阈值分别为t=122和t=115,误判信息少,完整地检测出运动目标。
若图像大小为M×N,高斯混合背景建模需针对每个像素点判断是否符合k(k=10)个模型,设n1为利用3σ准则进行一次相似性判断的时间,则混合高斯背景建模的时间复杂度:
Tgauss(n)=Ο(M×N×n1×k)
改进的高斯混合背景建模增加了对3个参数的实时更新,设一个参数的更新运算时间为n2,则改进的混合高斯背景建模的时间复杂度:
Tad-gauss(n)=Ο(M×N×n1×k+3×10×n2)
一维最大熵背景减除需要计算图像中每个灰度级的概率并计算该灰度值对应像素的信息熵,最终确定最大信息熵时的灰度值,依据最大熵阈值判断每个像素点是否为目标,设上述概率统计运算、熵运算以及判断运算时间均为n3,则一维最大熵的时间复杂度:
Tentropy(n)=Ο(M×N×n3×2+256×n3)
显然改进高斯混合模型增加了参数更新,且参数更新运算复杂,因此改进高斯混合背景建模时间复杂度最大,而熵运算比3σ准则复杂,所以一维信息熵和高斯混合背景建模时间复杂度接近,表2给出了上述3种方法检测视频图像运动目标的计算时间。
表2 3种方法的计算时间
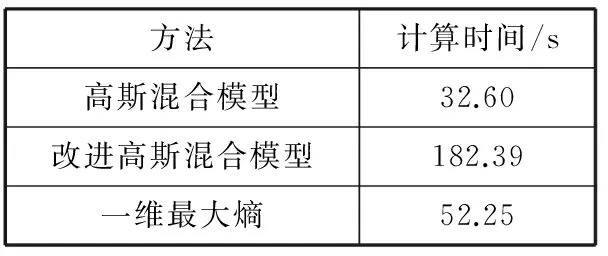
方法计算时间/s高斯混合模型32.60改进高斯混合模型182.39一维最大熵52.25
虽然传统混合高斯背景建模用时最短,但易出现鬼影;改进的高斯混合模型通过分段设置学习效率,提高了背景更新速率,消除了鬼影但是处理时间长;一维最大熵方法用时较短且无鬼影出现,更适用于视频图像中运动目标的实时检测。
3 结束语
本文通过确定目标信息和背景信息的最大信息熵确定最佳运动目标的检测阈值,针对背景复杂及运动背景的视频图像,比帧间差分法和高斯混合背景建模方法检测的运动目标完整性好,运动目标误判率低;本文的方法比改进的高斯混合背景建模方法计算时间短,更适用于运动目标的实时检测。
[1] 邵奇可,周宇,李路,等. 复杂场景下自适应背景减除算法[J]. 中国图象图形学报, 2015,20(6):756-763.
[2] Senst T, Evangelio R H, Sikora T. Detecting people carrying objects based on an optical flow motion model[C]// Proceedings of 2011 IEEE Workshop on Applications of Computer Vision (WACV). 2011:301-306.
[3] 许敬,张合,张祥金. 基于帧间差分和光流法的红外图像运动检测[J]. 计算机仿真, 2012(6):248-252.
[4] 陆冰,王玲玲,裴东. 基于混合高斯模型和六帧差分的目标检测算法[J]. 激光与红外, 2016(2):240-244.
[5] 刘文萍,吴立德. 图像分割中阈值选取方法比较研究[J]. 模式识别与人工智能, 1997(3):271-277.
[6] Cai Xun, Jiang Long, Hao Xingwei, et al. A new region gaussian background model for video surveillance[C]// Proceedings of 2008 4th International Conference on Natural Computation. 2008:123-127.
[7] 王永忠,梁彦,潘泉,等. 基于自适应混合高斯模型的时空背景建模[J]. 自动化学报, 2009,35(4):371-378.
[8] 吴亮,周东翔,范才智,等. 基于直方图匹配的鬼影检测算法[J]. 计算机工程与科学, 2008,30(7):57-60.
[9] 华媛蕾,刘万军. 改进混合高斯模型的运动目标检测方法[J]. 计算机应用, 2014,34(2):580-584.
[10] 韩明,刘教民,孟军英,等. 一种自适应调整K-ρ的混合高斯背景建模和目标检测算法[J]. 电子与信息学报, 2014,36(8):2023-2027.
[11] Cui Huijuan, Singh V P. Maximum entropy spectral analysis for stream flow forecasting[J]. Physica A: Statistical Mechanics and Its Applications, 2016,442:91-99.
[12] 曹力,史忠科. 基于最大熵原理的多阈值自动选取新方法[J]. 中国图象图形学报, 2002,7(5):461-465.
[13] Mahmoudi L, Zaart A E. A survey of entropy image threshold techniques[C]// 2012 2nd International Conference on Advances in Computational Tools for Engineering Applications. 2012:204-209.
[14] 贺建峰,符增,相艳,等. 基于灰度空间相关性最大类间方差的图像分割[J]. 计算机工程, 2015,41(11):280-286.
[15] 丁晓峰,何凯霖. 基于最大类间方差的改进图像分割算法[J]. 计算机工程与设计, 2015(10):2765-2768.
[16] 刁伟鹤,毛峡,常乐. 自动目标识别中的图像序列质量评价方法[J]. 电子与信息学报, 2010,32(8):1779-1785.
[17] 游瑞蓉,王新伟,任鹏道,等. 约翰逊准则的视频监控目标检测性能评估方法[J]. 红外与激光工程, 2016,45(12):269-274.
