运行工况下转子系统模态参数识别技术研究
2018-03-28臧廷朋王凤仁温广瑞张志芬西安交通大学机械工程学院智能仪器与监测诊断研究所西安70049新疆大学机械工程学院乌鲁木齐830047
臧廷朋, 王凤仁, 温广瑞,2, 张志芬(. 西安交通大学 机械工程学院 智能仪器与监测诊断研究所, 西安 70049; 2. 新疆大学 机械工程学院, 乌鲁木齐 830047)
转子系统的模态参数综合反映了旋转机械的动力特性,准确的识别模态参数对旋转机械的状态监测和故障诊断有着重要意义[1]。随着旋转机械不断朝着精密化、大型化、高速化发展,现代旋转机械工作转速可能接近第二阶临界转速,因此必须精确的识别系统模态参数,从而保障机组高效、平稳持续运行[2]。
工程实际中常用传递矩阵法和有限元法识别系统的模态参数[3-5],考虑到机组结构的复杂性和机组相互之间关联影响,建立准确的系统模型比较困难。同时上述两种方法没有考虑实际运行工况下系统刚度、阻尼变化对模态参数的影响,模态参数识别结果与真实值往往有较大差异[6]。另一方面,为了获得系统的瞬态响应需要施加人工激励,对大型高速工业用转子系统施加人工激励费时费力,降低了模态参数识别的精度和效率。相对于广泛应用的频域方法,模态参数时域识别方法直接使用不需要进行时频变换的时域信号进行识别,避免了时频变换导致的能量泄漏,同时不影响机组的连续正常运行,因而模态参数的时域识别方法受到越来越多的关注[7-9]。郑钢铁等[10]提出了一种基于时域振动参数识别理论的模态参数识别方法,该方法通过获取振动响应并结合系统先验知识,实现了模态参数的现场识别;宋志强[11]提出了基于遗传算法的模态参数时域识别方法,在使用多信号分类确定系统阶次的基础上,利用遗传算法寻优获得系统的自振频率和阻尼比。目前基于运行工况的系统模态参数识别尚缺少有效实用的方法。
本文针对运行工况下系统模态参数识别问题,提出一种基于随机子空间[12-15]和经验模式分解相结合的系统模态参数识别方法。该方法首先对转子系统振动响应进行窄带滤波,获取转子振动响应中各阶自由衰减分量,然后借助于EMD降低模态混叠和其他信号成分的影响,最后利用SSI识别各阶模态的固有频率。该方法直接处理系统时域响应数据,完成保留了数据信息,同时避免了各阶模态之间的相互影响,模态参数识别结果更具有可靠性和实际应用价值。
1 经验模式分解
经验模式分解[16-18]是一种基于数据本身特征把复杂的信号分解为有限个固有模式分量(IMF)的方法,可以自适应处理非线性、非平稳信号。其本质是利用信号特征时间尺度来获得信号的固有模式分量。EMD分解建立在三个假设的基础上:信号至少有两个极值点(一个极大值和一个极小值);特征时间尺度由极点之间的时间间隔定义;如果缺少极值点但有变形点,可通过微分获得极值点。
EMD分解得到一个固有模式函数主要思想为,通过提取信号x(t)的极大值点和极小值点,利用三次样条得到上包络和下包络,获取包络均值为m(t),用原始信号减去包络均值得到h(t);检验h(t)是否为一个IMF分量,如果不是,令原信号是h(t),重复上述过程直到找到第一个IMF分量c1(t);将第一个IMF分量从x(t)分离出来作为新的数据,重复上面过程,可以得到一系列固有模式分量和一个残余项。原始信号可以表示为
(1)
2 随机子空间理论
2.1 随机子空间模型
随机子空间方法是一种适用于平稳随机激励条件下模态参数识别的时域方法。其模型是由结构动力学MCK方程推导出来的,并假设噪声信号是零均值的随机平稳噪声。模型表达式为
(2)
式中:A为状态矩阵;C为输出矩阵;wk为零均值过程噪声;vk为零均值测量噪声;xk为状态向量;yk为输出的测量值。
2.2 随机子空间原理
SSI方法的思想是把将来输入的行空间投影到过去输入的行空间上,然后利用投影的结果预测未来。根据传感器输出,将输出信号构建出Hankel矩阵
(3)
式(3)是由N个采样数据构成的,N=2i+j-1。其中p表示“过去”的数据,f表示“未来”的数据,要求j>>i。
对Hankele矩阵QR分解
(4)
由空间投影性质可以进行正交投影
(5)
式中:†表示伪逆。经过QR分解可以使得数据量极大的缩减,有利于程序运行。
对投影矩阵SVD分解
(6)
式中:U1∈Rli×n;S1∈Rn×n;V1∈Rj×n,系统的阶次由S1的秩来确定。
对投影矩阵进行卡尔曼状态滤波
(7)

由式(6)和式(7),可令
(8)
(9)
正交投影矩阵还可以定义为
(10)

(11)
类似上面的推理,可以得到
(12)
将卡尔曼状态滤波与输出代入系统状态方程
(13)
式中:Yi,i表示只有一个行块的输出矩阵。
由于干扰与状态不相关,可以采用最小二乘法来计算矩阵的渐近无偏估计
(14)
在确定系统的状态矩阵和输出矩阵之后,对系统的状态矩阵A进行特征值分解,求其特征值λi。离散时间系统与连续时间系统的特征值关系为
(15)

则信号的频率为
(16)

3 基于SSI和EMD的系统模态参数识别
运行工况下的转子系统,其振动激励包括不平衡等自身激励以及外部随机环境激励,前者会产生明显的各阶振荡谐波,后者持续存在并激发产生振动响应中的自由衰减分量。基于SSI和EMD的系统模态参数识别方法,侧重于通过随机环境激励产生的微弱自由衰减分量中实时的识别系统模态参数。首先根据先验知识和转子系统振动响应设置滤波器参数,采用窄带滤波方法提取转子振动响应中的各阶自由衰减分量,考虑到响应信号中各阶模态存在混叠的情况,利用EMD自适应的进一步提取更加精确的各阶自由衰减分量信号,然后利用SSI求解系统状态空间方程的状态矩阵和输出矩阵得到系统的模态参数。具体识别过程,如图1所示。
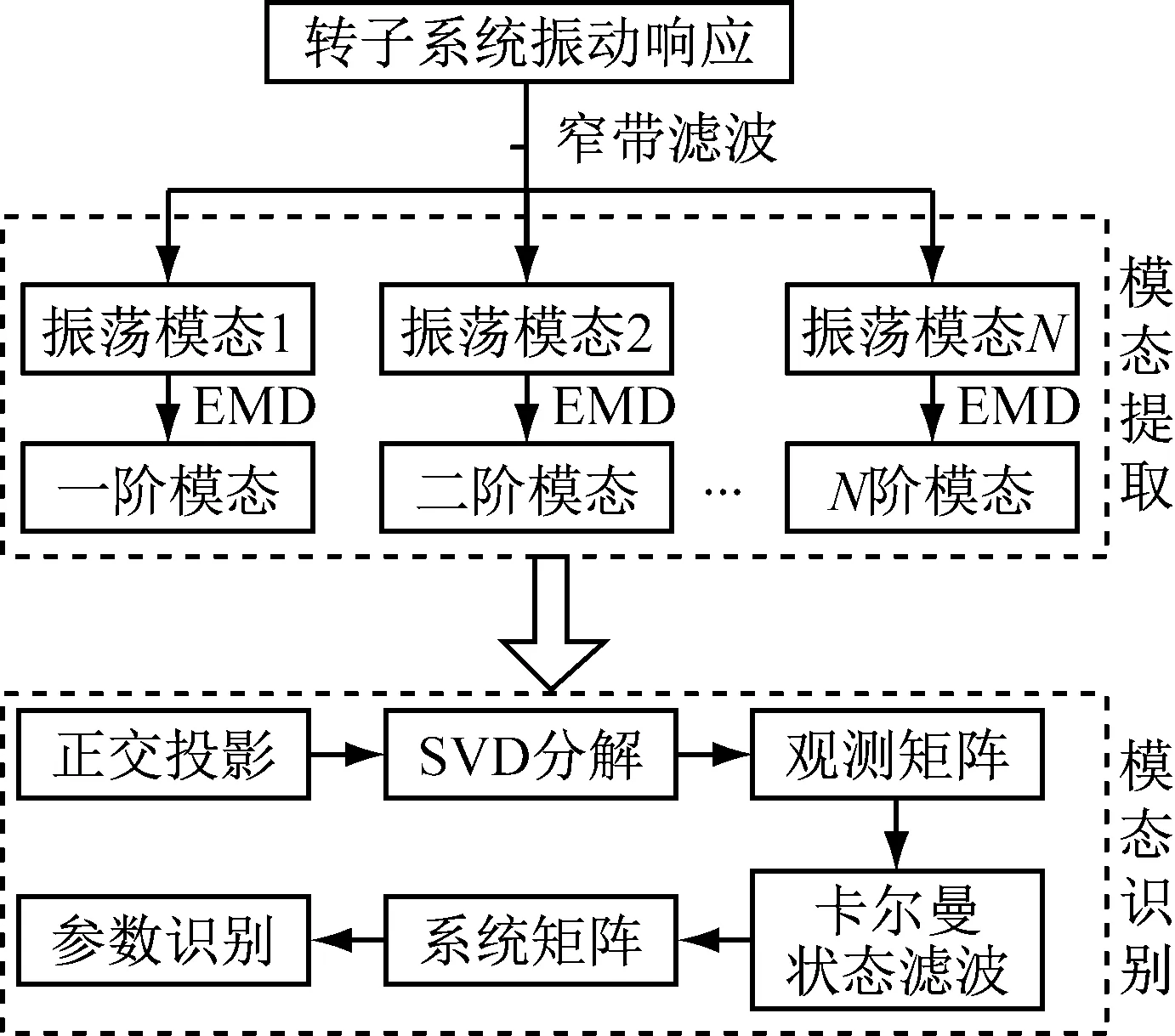
图1 模态参数识别流程图
4 仿真分析
针对运转工况下转子系统振动响应的特点,将各阶振荡谐波表示为幅值与频率固定的余弦信号。将各阶次自由衰减分量表示为频率固定、幅值按指数形式变化的余弦信号。考虑到转子运行时需要远离各阶临界转速,因而各阶自由衰减分量的幅值应远小于谐波的振动幅值。构建如下的仿真信号
x(t)=30cos(2×π×50t+π/6)+
10cos(2×π×5t+π/8)+
0.1exp(-0.15t)cos(2×π×25t+π/4)+
0.05exp(-0.14t)cos(2×π×75t)
(17)
式中:第一项模拟一倍频分量,一倍频分量频率为50 Hz;第二项模拟分倍频分量,分倍频分量频率为5 Hz;第三项模拟系统一阶模态自由衰减分量,频率为25 Hz;第四项模拟系统二阶模态自由衰减分量,频率为75 Hz。添加方差为1的白噪声,采样频率为1 kHz,采样时间为2 s。仿真信号的时域波形如图2所示。对仿真信号进行窄带滤波,并用EMD提取前两阶模态自由衰减分量,分别如图3和图4所示。
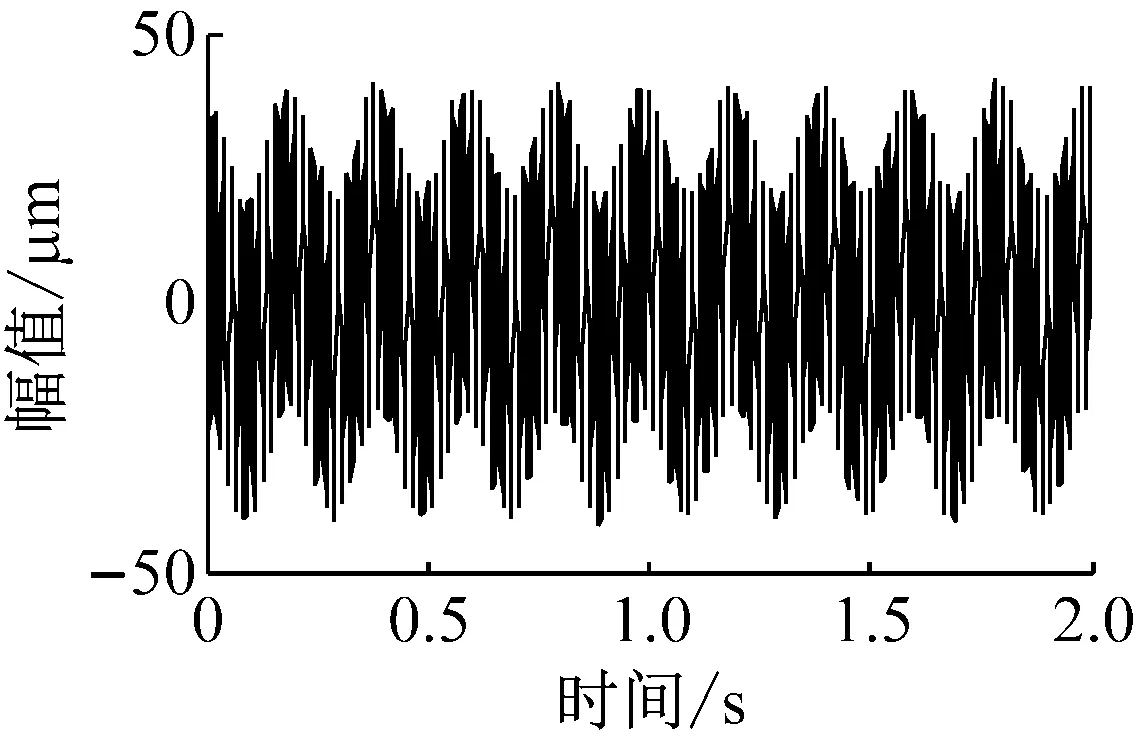
图2 仿真信号时域波形

图3 一阶模态自由衰减分量

图4 二阶模态自由衰减分量
使用本文方法对提取的各阶模态自由衰减分量进行识别,结果如表1所示。通过对比,可以看出本方法可以很好的从模拟信号中提取出一阶模态与二阶模态固有频率。

表1 模态参数识别结果
5 实验研究
在Bently RK4转子实验台上对本文提出的方法进行验证,实验台布置如图5所示。设置采样频率为2 048 Hz,采样时长为1 s,用DT9837B数采卡对转子运行工况下稳定转速过程进行连续数据采集。有4个通道的数据,可以任意选取一组数据作为监测数据,本文选用1_X(第一通道)通道的数据进行验证分析。
转子实验台的工作转速为4 000 r/min,介于一阶与二阶临界转速之间。在求解系统各阶模态参数时,首先通过滤波器滤波,提取各阶自由衰减分量。提取一阶衰减分量滤波器中心频率为30 Hz,带宽是60 Hz;提取二阶衰减分量滤波器中心频率为110 Hz,带宽是50 Hz。由于模态混叠及其他信号成分对模态参数识别精度有较大影响,对滤波后的信号进行EMD分解,选取第一个IMF分量进行随机子空间模态识别。滤波和EMD提取的一、二阶自由衰减分量分别如图6~图9所示。

图5 实验台结构示意图
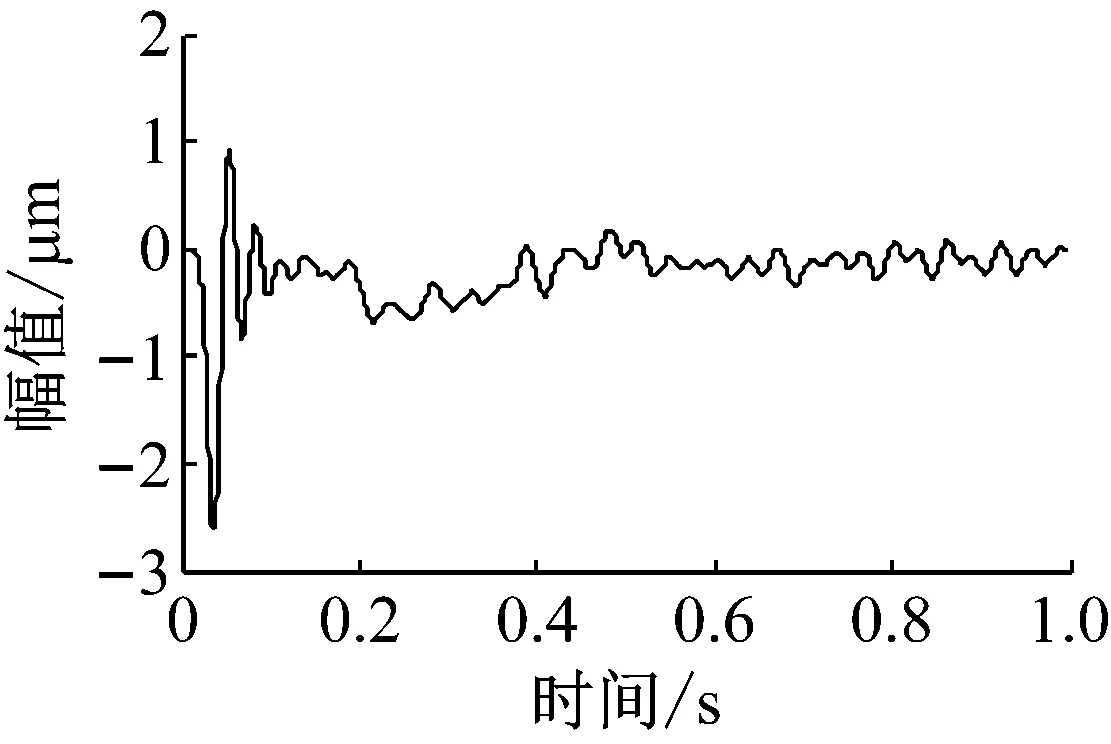
图6 滤波后的一阶自由衰减分量
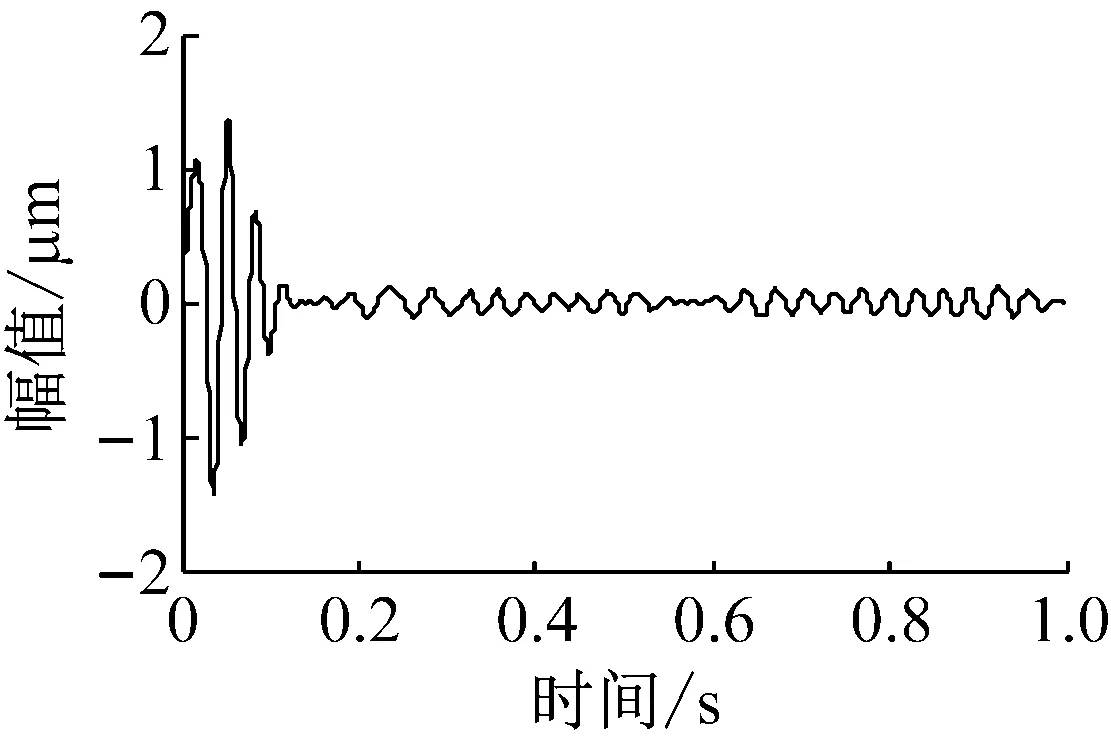
图7 EMD提取的一阶自由衰减分量
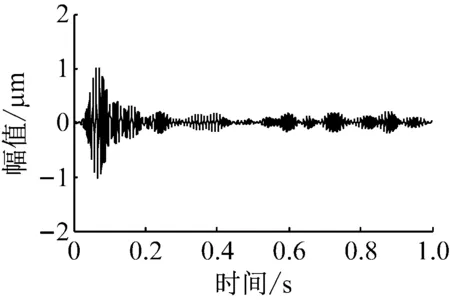
图8 滤波后的二阶自由衰减分量
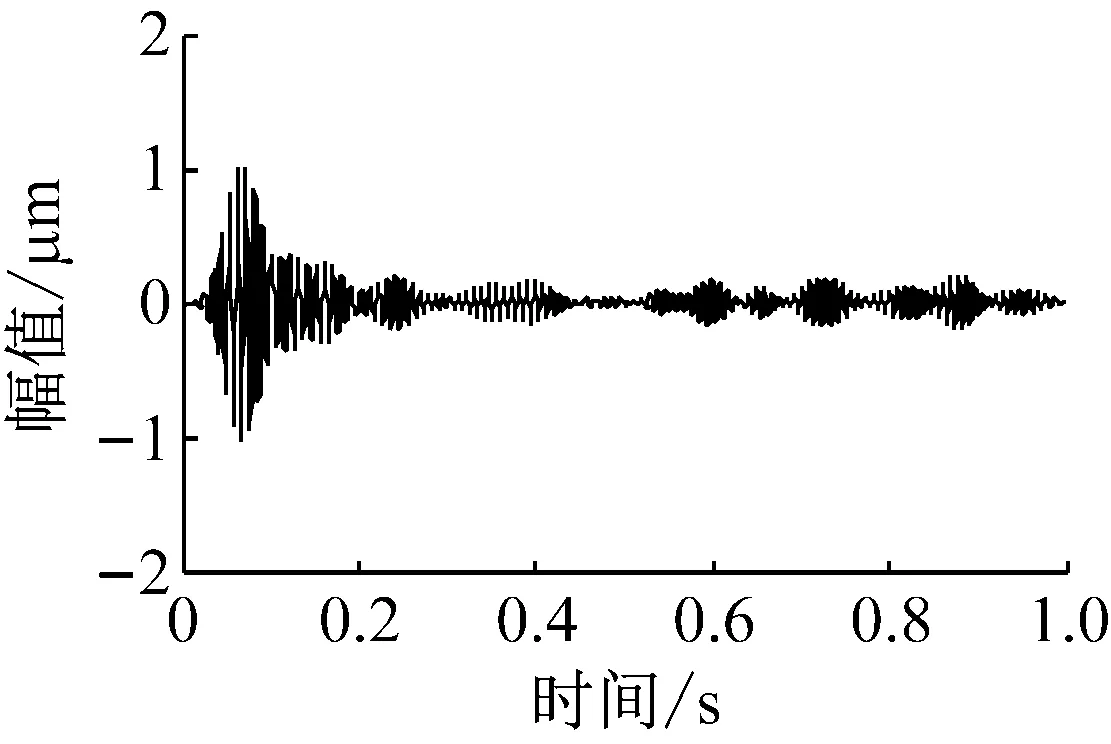
图9 EMD提取的二阶自由衰减分量
对EMD提取后的各阶模态衰减分量信号用SSI进行模态参数识别,识别结果如表2所示。为了验证识别效果,通过一次起车过程获取转子系统的前两阶临界转速,起车过程bode图,如图10所示。其中1点处转速为1 966 r/min,对应的频率是32.77 Hz,2点处转速为6 496 r/min,对应频率是108.27 Hz。通过对比,可以看出本方法求解的一阶、二阶固有频率与系统实际的特性相吻合;同时,考虑到起车过程数据采集具有滞后性,识别的各阶模态频率小于起车过程临界转速对应的频率。

表2 系统模态参数识别结果
为了分析起车升速过程中模态参数的变化规律,选取3 900 r/min至4 900 r/min之间11个不同转速,对各个转速时转子系统进行模态参数识别,识别结果如表3和图11所示。图中,两条曲线分别是一阶模态频率随转速变化的情况和二阶模态频率随转速变化的情况。从表3和图11中可以看出,系统模态频率随转速变化会有轻微的波动,整体变化是随着转速的上升,一二阶模态频率有降低的趋势。
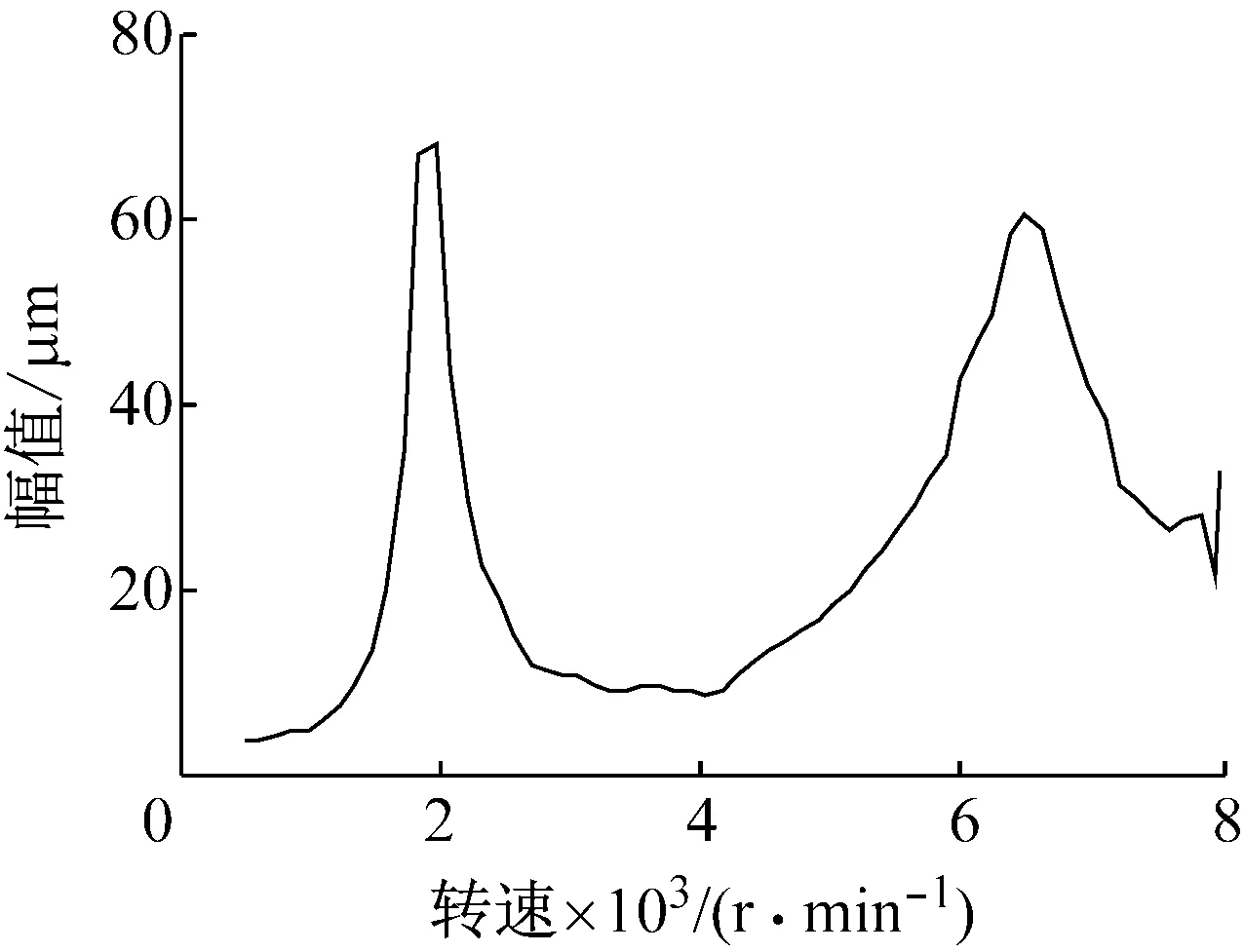
图10 Bode图

转速/(r·min-1)各阶模态频率/Hz一阶二阶390032.5512108.4917400031.1822107.7785410030.8316106.8193420031.3412107.5438430030.1422107.1453440032.5127106.9571450031.0994106.2167460031.7180107.1076470031.8012106.4699480030.8582105.5993490030.4812105.6045

图11 模态参数随转速变化趋势
6 结 论
针对运行工况下系统模态参数识别问题,本文提出一种基于随机子空间和经验模式分解相结合的系统模态参数识别的方法。仿真数据和实验研究表明,该方法可以准确识别系统一、二阶模态参数。得出以下结论:
(1) EMD可以有效减少各阶模态之间的混叠以及其他成分对模态参数识别的干扰,提高模态参数识别的精度。
(2) 该方法实施起来无需复杂设备也无需繁杂的计算,具有良好的抗噪性、通用性。
(3) 该方法直接处理系统运行工况下的时域响应数据,完成保留了数据信息,同时不影响机组的正常运行,模态参数识别结果更具有可靠性和实际应用价值。
[1] 段吉安,虞烈,谢友柏,等. 轴承-转子系统模态参数时域识别的研究[J]. 机械科学与技术,1997, 16(2): 11-15.
DUAN Ji’an, YU Lie, XIE Youbai, et al.The study on identification of model parameters of rotor-bearing systems[J]. Mechanical Science and Technology for Aerospace Engineering, 1997, 16(2): 11-15.
[2] 林胜,林春庭. 高速数控机床现状和发展趋势[J]. 精密制造与自动化,2004(1):5-8.
LIN Sheng, LIN Chunting. Status and developing trend of high speed CNC machine tools[J]. Precise Manufaction & Automation,2004(1):5-8.
[3] 曹树谦,陈予恕,丁千,等. 高速转子动平衡的传递函数法[J]. 机械强度,2002, 24(4):500-504.
CAO Shuqian, CHEN Yushu, DING Qian, et al. Transfer function technique of dynamic balancing for high-speed rotors[J]. Journal of Mechanical Strength, 2002, 24(4):500-504.
[4] 韩庆华, 张鹏, 芦燕. 基于传递函数法的大跨建筑非结构件动力性能研究[J]. 土木工程学报,2014, 47(增刊2):79-84.
HAN Qinghua, ZHANG Peng, LU Yan. Dynamic performance of non-structural components in large span buildings based on transfer function[J].China Civil Engineering Journal,2014, 47(Sup2):79-84.
[5] YANG J N, LEI Y. Identification of natural frequencies and dampings of in situ tall buildings using ambient wind vibration data[J]. Journal of Structural Engineering, 2004, 130(5):570-577.
[6] 孙伟,汪博,闻邦椿. 高速主轴系统静止及运转状态下动力学特性对比分析[J]. 机械工程学报,2012, 48(11):146-152.
SUN Wei, WANG Bo, WEN Bangchun. Comparative analysis of dynamics characteristics for static and operation state of high-speed spindle system[J]. Journal of Mechanical Engineering, 2012, 48(11):146-152.
[7] 任伟新.环境振动系统识别方法的比较分析[J].福州大学学报(自然科学版).2001, 29(6): 80-86.
REN Weixin. Comparison of system identification methods using ambient vibration measurements[J]. Journal of Fuzhou University(Natural Science), 2011, 29(6): 80-86.
[8] BRINCKER R,ZHANG L M, ANDERSEN P. Output-only modal analysis frequency domain decomposition[C]∥Proc of 25th Int Seminar on Modal Analysis (ISMA25) Vol 2. Leuven, Belgium, 2000.
[9] 王彤,张令弥.运行模态分析的频域空间域分解法及其应用[J].航空学报.2006, 27(1): 62-66.
WANG Tong, ZHANG Lingmi. Frequency and spatial domain decomposition for operational modal analysis and its application[J]. Acta Aeronautica et Astronautica Sinica, 2006, 27(1): 62-66.
[10] 郑钢铁,黄文虎. 转子系统模态参数现场识别技术研究[J]. 力学学报,1991, 23(5):634-640.
ZHENG Gangtie, HUANG Wenhu. An investigation into the field identification technique of modal parameters of rotating system[J]. Acta Mechanica Sinica,1991, 23(5):634-640.
[11] 宋志强. 水电机组轴系统模态参数的时域识别研究[J]. 西北农林科技大学学报(自然科学版),2011(11):229-234.
SONG Zhiqiang. Study on modal parameters time domain identification of generator set shaft system[J].Journal of Northwest A & F University (Natural Science Edition), 2011(11):229-234.
[12] 陈永高, 钟振宇. 基于CEEMD分解和Data-SSI算法的斜拉桥模态参数识别[J]. 振动与冲击, 2016, 35(8):166-172.
CHEN Yonggao, ZHONG Zhenyu. Modal parameter identification of a cable-stayed bridge based on CEEMD and DATA-SSI algorithm[J]. Journal of Vibration and Shock, 2016, 35(8):166-172.
[13] 胡异丁, 李丹, 任伟新,等. 基于延时随机子空间方法的非白噪声环境激励结构模态参数识别[J]. 振动与冲击, 2015,34(8):71-76.
HU Yiding, LI Dan, REN Weixin, et al. Modal parameter identification of structures under non-white noise ambient excitations using delay-index-based stochastic subspace method[J]. Journal of Vibration and Shock, 2015, 34(8):71-76.
[14] REN W X, ZHAO T, HARIK I E. Experimental and analytical modal analysis of a steel arch bridge[J]. Journal of Structural Engineering, 2004, 130(7):1022-1031.
[15] 赵书强, 张一,马燕峰. 基于数据驱动随机子空间方法在低频振荡辨识中的应用[J]. 电力系统保护与控制,2013(8):81-86.
ZHAO Shuqiang, ZHANG Yi, MA Yanfeng. Data-driven based stochastic subspace identification for low frequency oscillation analysis[J]. Power System Protection and Control, 2013(8):81-86.
[16] RILLING G, FLANDRIN P, GONCALVES P. On empirical mode decomposition and its algorithms[C]∥IEEE-EURASIP Workshop on Nonlinear Signal and Image Processing NSIP-03. Grado, Italy, 2003.
[17] GAI G H. The processing of rotor startup signals based on empirical mode decomposition[J]. Mechanical Systems and Signal Processing, 2006, 20(1): 222-235.
[18] 李天云,袁明哲,李军强,等. 基于EMD和SSI的电力系统低频振荡模态参数识别方法[J]. 电力系统保护与控制,2011, 39(8):6-10.
LI Tianyun, YUAN Mingzhe, LI Junqiang, et al. Method of modal parameter identification of power system low frequency oscillation based on EMD and SSI[J]. Power System Protection and Control, 2011, 39(8): 6-10.
