智能阀门定位器流量特性非线性修正及控制
2018-03-22王庭康
王庭康
(江西铜业集团公司 贵溪冶炼厂,江西 贵溪 335424)
1 引言
智能型阀门定位器在冶金、石化、电力等行业的流量控制中得到广泛的应用。但是,国内产品普遍存在流量调节的速度慢、流量控制精度低的一些缺点[1]。
作者就流量特性和位置反馈进行非线性修正研究,并对控制算法进行改进,以实现更高精度流量控制。
2 定位器的流量特性
2.1 流量特性概述
流量调节阀因阀芯几何结构不同,而流量特性也不同,主要流量特性包括:直线、等比、抛物线和快开等四种[2-3]。
智能型阀门定位器流量特性表达了定位器给定信号和阀门开度间的函数关系[2]。其原理是定位器根据给定信号控制压电阀,然后膜片阀驱动阀杆运动,并保证信号与位移之间的函数关系,以实现调节阀对应的流量特性[3]。其实质是通过改变阀杆行程与阀位输入信号的相互关系,达到实现智能阀门定位器线性、等百分比和快开流量特性。定位器可以配置在不同调节阀上,并通过自主选择各种流量特性,从而达到实现不同流量特性的控制目的[3]。
2.2 流量特性曲线拟合
根据定位器的流量特性数据,应用MATLAB进行曲线拟合,得到流量特性曲线及方程,流量特性曲线如图1所示。

图1 四种流量特性的曲线
采用不同拟合次数,曲线误差见表1。
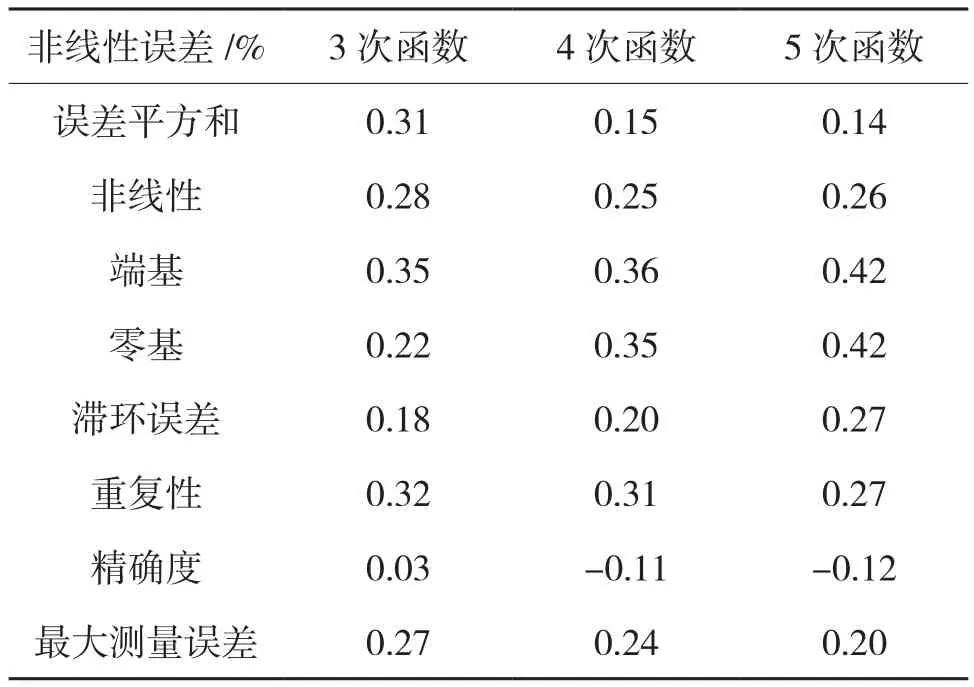
表1 流量特性与拟合曲线误差比较
根据误差平方和最小原则,同时考虑运算量的大小,选择四次函数进行曲线拟合。快开特性曲线拟合数据不佳,采用指数拟合的方法[4]。
3 阀位反馈非线性修正
位置传感器是高可靠旋转型电位器,其作用是将机械直线位移量变换为角位移量电信号,执行机构阀杆机械结构原理图如图2所示。
阀杆直线位移h与角位移θ之间的关系:

其中,α为连杆与阀杆垂直时转过的角度,H为阀杆全行程的位移,A为连杆固定支点与阀杆之间的尺寸
电位器中间端电信号的采样值D与角位移θ之间的关系为:

其中,D0为位置0%时对应的采样值,k为单位角度对应的采样值变化值[4]。
阀杆的直线位移量与转动的角度之间是正切关系,角位移量与电位器电压值之间是线性关系,经过非线性修正后,将阀杆直线位移量与反馈量变换为线性关系。

图2 执行机构阀杆机械结构原理图
4 控制算法
4.1 开关控制算法
开关控制算法是通过计算理想位置信号和位置反馈信号的差值,输出相应压电阀控制信号,分别实现进气、排气或保持等三种工作方式。当差值大时,压电阀全部打开,全速进气,迅速运动到设定位置,达到粗调目的[5];当接近设定阀位时,限制PWM控制信号的周期和占空比,实现微调;为避免频繁振荡,可设定死区的范围 ,当偏差进入死区范围,关闭压电阀,以使阀位保持在当前的位置[5]。
PWM信号和偏差之间的函数关系,如公式(3)所示。
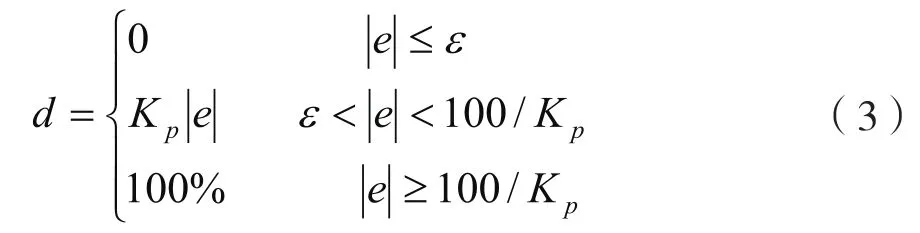
开关控制算法的实现流程如图3所示。

图3 开关控制算法实现流程图
4.2 开关控制算法的改进
压电阀需高电平保持40ms以上,以保证阀芯可靠开启;需低电平保持10ms以上,以保证阀芯可靠关闭,故此,按式(4)对占空比进行修正。
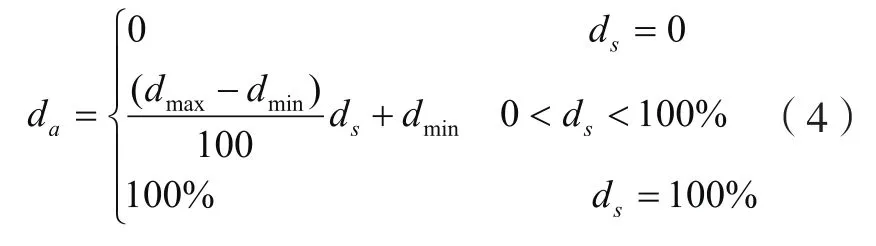
其中,da为修正后的占空比,ds为理想占空比,dmax表示最大占空比,dmin表示最小占空比。
薄膜调节阀在低阀位时,调节速度比较快;而在高阀位时,调节速度变慢。在相同的阀位误差下,使PWM的占空比随着阀位的升高而加大,改善高阀位时调节速度。因此,在上述开关算法占空比改进上,作者又增加了随阀位线性随动的占空比调整算法,具体表达式如式(5)。

5 实测实验和误差分析
实验输入信号为4~20mA的电流,输出为位置反馈电压信号。分别选择定位器线性、等比1∶25、等比1∶50、反等比25∶1等流量特性曲线进行实验,对实测的数据,使用MATLAB进行曲线拟合,如图4所示。
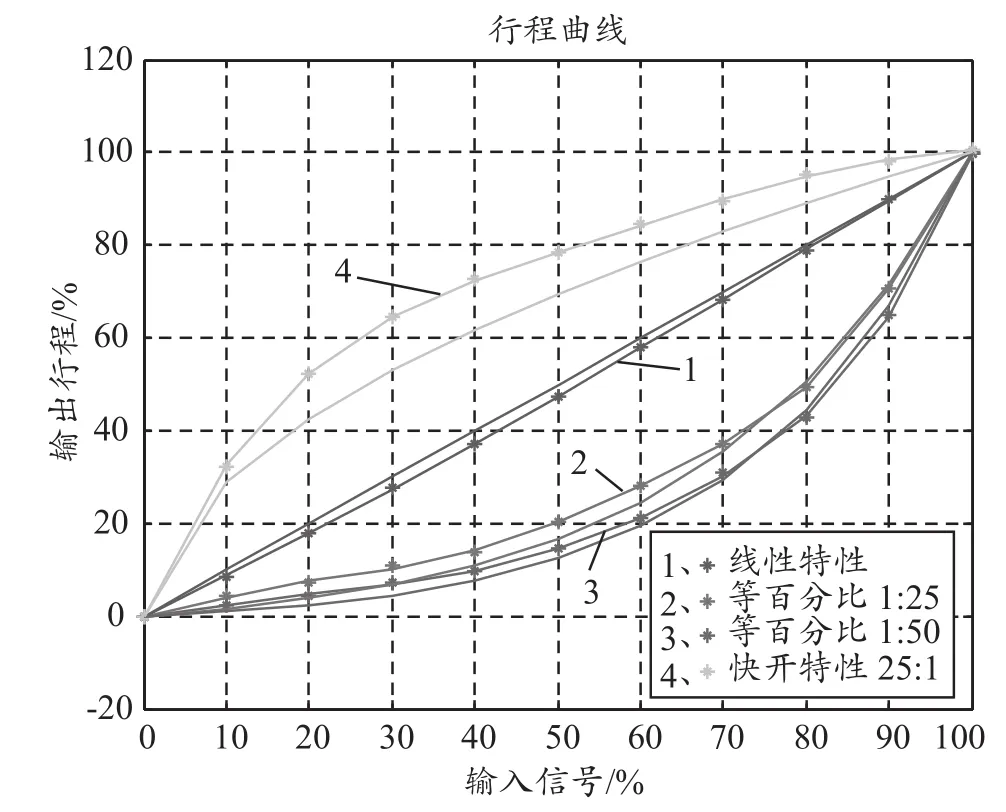
图4 实测阀位数据拟合曲线
实验数据拟合及误差分析流程图如图5所示,计算结果如表2所示。
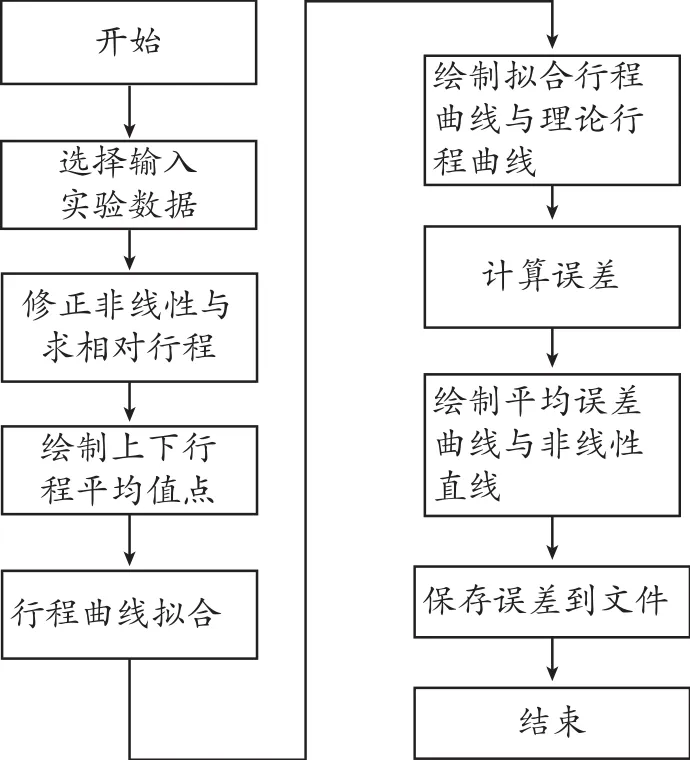
图5 实验数据拟合及误差分析流程图
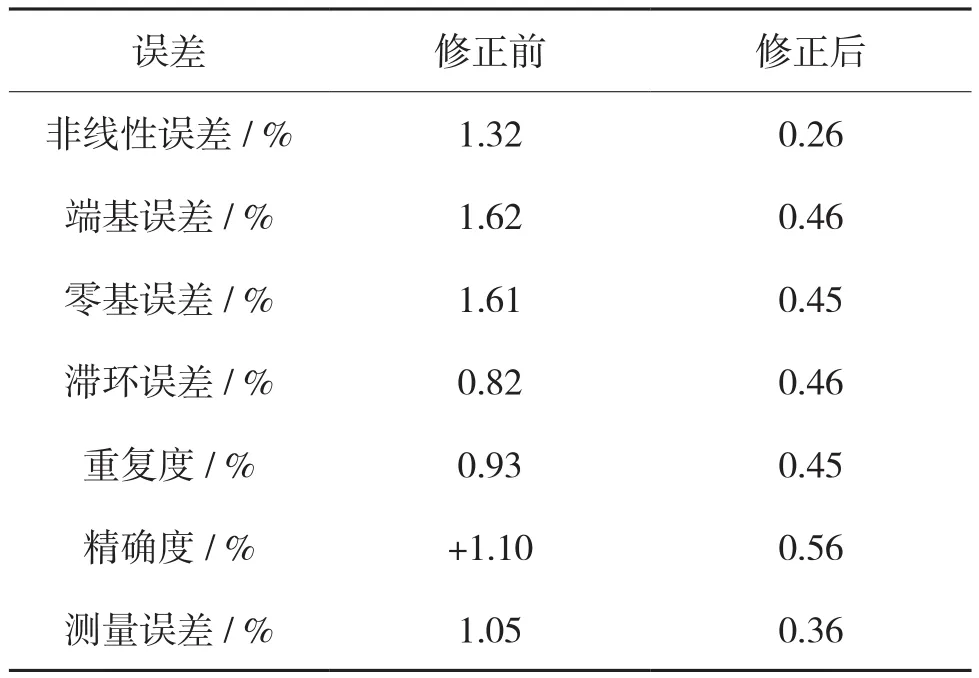
表2 改进前后误差对比表
从以上数据可以看出,误差主要来源于反馈机械自身的非线性因素,因此,对阀门定位器的非线性修正,可有效提高流量特性的精度[6]。
6 小结
作者通过曲线拟合方法,得到了智能型阀门定位器的流量特性函数方程,并根据调节阀的具体机构特点,有效地改进了开关控制算法,有效缩短了调整时间。
证明了阀杆位移与反馈信号之间的非线性关系,并进行了有效地非线性修正,提高了智能型阀门定位器直线、等比和快开流量特性精度,非线性误差为0.26%,重复度为0.45%,滞环误差为0.46%,达到更高精度的流量控制要求。
[1]吴亚平,宋彦彦,方毅芳,等.智能阀门定位器的智能特性评测[J].中国仪器仪表. 2017(11):41-45.
[2]王江峰.压电阀技术在智能阀门定位器中的应用[J].自动化应用,2016 (3) :38-39.
[3]杨菲,杨德伟.阀门定位器气动传动系统建模与MATLAB 仿真分析[J].机械制造, 2016(1):22-25.
[4]邓君,孙宏泉,耿振,等. 基于MSP430的低功耗直行程智能阀门定位器[J]. 中国仪器仪表, 2017(11):39-43.
[5]李焱琪.基于模糊PID控制的智能电气阀门定位器的实现[J].电子技术与软件工程, 2016(11):94.
[6]张浩,王昕,王振雷,等.基于模糊Smith 控制的智能阀门定位器[J].实验室研究与探索, 2017(5):4-9.
