基于关联跟踪目标的欠驱动系统跟踪控制设计研究
2018-03-20广东工业大学自动化学院王银河
广东工业大学自动化学院 史 彦 王银河
0 引言
欠驱动系统,是指独立的控制输入维度少于系统状态自由度的一类非线性系统,如倒立摆系统[1]、球杆系统[2]、各种起重机(桥式起重机、臂式起重机、塔式起重机)等[3]。与完全驱动系统相比,欠驱动系统在节约能耗、降低造价、减轻整体重量、增强系统可靠性等方面具有不可替代的优势。从控制理论的角度来看,由于控制输入数量的缺失,使得欠驱动系统控制问题变得十分复杂,通常需要利用各自由度间的耦合关系来实现整个系统的控制目标。因此,不仅在控制理论上还是实际应用中,欠驱动系统的控制问题都具有较高的研究价值。
到目前为止,对于欠驱动系统的研究已有丰富的成果,一些比较好的理论和方法已被提出。对于一类二自由度欠驱动机械系统,文献[4]提出了一种基于趋近率法的分级滑模控制策略,其基本原理是将一种非线性趋近律引入到系统的控制机制中。文献[5]中针对欠驱动系统在系统不确定性和外界干扰条件下的稳定控制问题,提出了自适应神经网络滑模控制策略。文献[6]针对具有未建模不确定性的欠驱动吊车系统的抗摆控制问题,提出了一种类似滑模控制的鲁棒控制策略。针对球杆系统的位置控制问题,文献[7]提出了一种基于前馈神经网络控制的球杆位置控制新方法。但关于关联跟踪目标的欠驱动系统的跟踪控制的研究还鲜见于报道。
欠驱动系统的跟踪控制,通常要求系统状态跟随给定的参考轨迹运动,一般情况下跟踪的参照值是相互独立的,但是在某些情况下,跟踪的参照值是相互关联的,例如在对永磁同步电机(PMSM)控制策略的研究时,我们通常采用矢量控制策略,通过对PMSM在三相静止坐标系中的数学模型进行Clarke变换和Park变换,可实现同步旋转的d、q、0坐标系中完成对电压、电流和磁势的解耦,使得各变量能分解在互相垂直的d、q、0坐标上[8]。当采用id= 0的控制策略时,从电动机的端口来看,PMSM相当于一台他励直流电动机,电机定子磁链矢量与永磁体磁链矢量在空间上相互正交,定子电流中只有交轴分量,无电流弱磁分量,交轴电流与输出转矩成正比[9]。当采用弱磁控制时,由于PMSM中由永磁体产生励磁磁场,磁场恒定,需要调节定子电流,通过增加定子电流的直轴分量来削弱气隙磁场,达到弱磁增速的目的[11],那么此时直轴分量id≠ 0。通过对永磁同步伺服电机的动态方程[14]分析,发现电机的电压、电流和转速三者之间所跟踪参照值需要满足一定的约束关系,因此对电流、电压和转速做跟踪控制的时候,必须考虑这种约束关系。其次,在对永磁同步电机弱磁控制的控制器设计时,从电流跟踪误差方程,发现控制只是作用在电流环系统,对于速度环我们没有施加任何的直接控制,它只是通过状态耦合关系的影响达到所期望的转速,可见该系统是一个欠驱动系统。将类似于以上跟踪控制方法加以抽象就形成了基于关联跟踪目标的欠驱动系统跟踪控制问题。因此,本文讨论在参考跟踪目标关联的情况下进行欠驱动系统跟踪控制。
1 系统模型
考虑如下欠驱动系统:



对于模型(1),其控制输入u少于控制目标x、ρ,而在控制输入u作用下需要通过系统状态x、ρ之间的耦合关系来达到跟踪目的。在对电机矢量控制时常使用这类模型,首先设定电机的预定转速,然后设定合适的直轴电流参考值,交轴电流参考值也随之而定, 最后对电机的电流、电压进行控制,再利用他们和转速之间的耦合关系来控制转速。
2 控制设计方法
控制目标为:对于给定的理想定常值向量x*(主要参考目标),设计控制输入u与辅助可调节目标使,并同时通过耦合作用达到。
在假定1成立的前提下,我们考虑满足下列方程的辅助可调节目标。

等式(4)体现了系统(1)对主要参考跟踪目标与辅助参考目标值间的关系要求。例如在永磁交流电机的矢量控制时,电机转速控制的第一步是确定预定转速ω*(主要参考目标),同时交轴电流的参考值(辅助可调节目标)也随之确定。

由此可得辅助可调节目标为:

注1:(i)若系统(1)中M为Hurwitz矩阵,则可取矩阵M0= 0,根据方程(2),辅助可调节目标可以按下列代数方程取常值向量:

在电机矢量控制时,若采用id≠ 0如弱磁控制策略时,辅助可调节目标(交轴电流的参考值)可以按照(6)选取。
由方程(2)容易得到跟踪误差方程:


利用方程(4),模型(7)转化为:

针对系统(1),本文提出如下控制律:

定理1:考虑动态方程(1),如果假设1,2成立,那么在控制器(9)与辅助参考目标(4)的作用下有下式成立:


把假定1中(3)以及控制器(7)带入上式可得:

从(9)式可知,V(t) ≤ 0,通过控制器(7)的控制作用后,可以使误差系统(4)稳定,e1(t )、e2(t )是有界的。同时,V(t)是单调递减的,又有V(t ) ≥ 0,所以存在。
由(9)两端积分得:

即有:

上式左边关于上限t的函数是单调递增的,且又有上界,所以有存在。

注3:利用定理1解决关联跟踪目标的非线性系统(1)的跟踪控制的步骤如下:
步骤二:验证假定1,若假定1成立则进行下一步,否则本文方法失效;
步骤三:选择合适的参照值x*,得到辅助可调节参照值ρ*;
步骤四:验证假定2,若假定2成立则进行下一步,否则本文方法失效;
步骤五:构造控制器(9)。
3 仿真实例
3.1 永磁同步伺服电机仿真
考虑如下的永磁同步伺服电机的动态方程[14]:



仿真中永磁同步伺服电机(隐极式)的动态方程(13)的参数有转动惯量、转矩常数与反电势常数相等、转子极对数、电气时间常数、机械时间常数、定子电阻q轴电感,额定转矩为,转速阻尼系数:

仿真结果如下:

图1 电流id、iq、转速ω的时间响应曲线图
从图1所示可以看出,电流id、iq与转速ω响应基本上已经完全重合,控制效果良好。

图2 突加负载电流id、iq、转速ω的时间响应曲线图

图3 突卸负载电流id、iq、转速ω的时间响应曲线图
从仿真结果可以看出,当负载增加(减少)时,id都能够保持在参照值附近,iq随负载增加(减少)而快速提高(降低),从而使转速ω能够快速调整后继续跟踪参照转速ω*。
3.2 球杆系统仿真
球杆系统[2],通过对横杆的倾斜角度的调节,实现对小球运动的控制,最后使小球达到预期位置。假设忽略球杆之间的摩擦力,球杆总是保持接触,球在杆上滚动而不滑动,杆在一定范围内旋转。


上述系统(17)符合系统(1)所描述的欠驱动系统模型。


图4 的时间响应曲线图

图5 r、θ 的误差时间曲线图
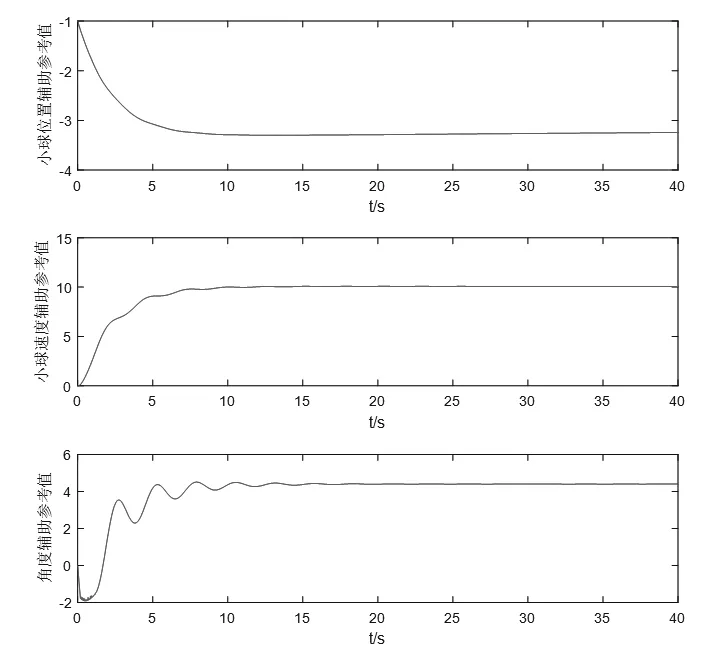
图6 辅助可调节目标的时间曲线图
4 结论
本文针对一类欠驱动系统,做跟踪控制其跟踪目标相互之间有一定的约束关系,并且其模型也是比较特殊,控制输入的维度少于控制目标的维度,提出了一种控制方法。同时,建立永磁同步伺服电机控制系统,利用本文的控制方法,在设定直轴交流分量不等于0的情况下,电机在升速、恒转速、突加负载、突卸负载等情况下,电流波形稳定,响应迅速,控制效果良好。对于球杆系统,在给杆的角速度的参照值为0的情况下,获得球的位置、球的加速度和杆的角度的辅助可调节参照值,在杆有一定倾角的情况下,小球最终能稳定在期望位置,从而验证了该控制方法的正确性和可行性。
[1]Messikh L,Guechi E H,Benloucif M L.Critically Damped Stabilization of Inverted-Pendulum Systems Using Continuous-Time Cascade Linear Model Predictive Control[J].Journal of the Franklin Institute,2017.
[2]吴偏偏,王富东,王敬驰.球杆控制系统的设计[J].自动化技术与应用,2015,34(9):114-116.
[3]孙宁,方勇纯.一类欠驱动系统的控制方法综述[J].智能系统学报,2011,06(3):200-207.
[4]于涛,杨昆,赵伟.一类欠驱动机械系统基于趋近律的分级滑模控制[J].控制工程,2017,24(9).
[5]杨兴明,汤星.一类欠驱动系统的自适应神经滑模控制[J].合肥工业大学学报:自然科学版,2015(7):901-905.
[6]Sun N,Fang Y,Chen H.A New Antiswing Control Method for Underactuated Cranes With Unmodeled Uncertainties:Theoretical Design and Hardware Experiments[J].IEEE Transactions on Industrial Electronics,2015,62(1):453-465.
[7]朱坚民,谢平,黄春燕,等.基于前馈神经网络控制的球杆系统位置控制[J].控制工程,2017,24(6):1186-1193.
[8]翟程远.永磁同步电机矢量控制的研究与应用[D].上海交通大学,2013.
[9]林伟杰.永磁同步电机伺服系统控制策略的研究[D].浙江大学,2005.
[10]王飞.混合动力汽车永磁同步电机控制策略的研究与实现[D].吉林大学,2011.
[11]孙旭霞,岳经凯.永磁同步电机MTPA弱磁控制方法研究[J].电气传动,2012,42(11):62-64.
[12]刘微.永磁同步电机弱磁控制策略研究[D].北京交通大学,2014.
[13]马翠玲.永磁同步电机弱磁控制方法研究[D].长安大学,2014.
[14]陈作宏.基于NJ控制系统的伺服控制设计方法研究[D].广东工业大学,2016.
[15]Jean-Jacques E.Slotine,Weiping Li.应用非线性控制[M].机械工业出版社,2006.
[16]李志民,柳强,张新权,等.基于最小二乘法的球杆系统输入输出建模研究[J].国外电子测量技术,2016,35(1):65-69.
[17]王红睿.一类欠驱动系统输出跟踪控制问题的理论和方法研究[D].吉林大学,2009.
