基于功率前馈的变步长直接占空比扰动法的MPPT研究
2018-03-20中国矿业大学电气与动力工程学院李华清马草原
中国矿业大学电气与动力工程学院 李华清 马草原
中国矿业大学信息与控制工程学院 宁新匡
中国矿业大学电气与动力工程学院 潘可欣
0 引言
太阳能作为一种可再生能源,取之不尽,用之不竭,是世界上公认的绿色能源[1]。随着太阳能技术应用的普及,光伏发电技术的发展亦势不可挡,目前已经形成了较为完整的产业链[2]。光伏电池属于非线性元件,在研究其输出特性时不能通过电压源或者电流源对其进行建模仿真[3]。
近年来许多学者对光伏电池的输出特性进行了研究,这些模型主要基于光伏电池的输出特性、物理机制建模[4],只能针对一些特定情况,在研究输出功率特性时缺乏通用性,过于理想化,不适合于工程应用。在此,该文基于最大功率点追踪技术(MPPT)[5]对光伏电池做了数学建模,根据Buck电路的直接占空比数学模型,对直接占空比扰动观察法做了改进[6],提出了一种基于功率前馈的变步长直接占空比扰动观察法,并使用Matlab中的Simulink模块对其进行了特性仿真[7],并分析了该算法的优势之处。
1 光伏电池等效电路和工用数学模型
光伏电池作为非线性直流电源,一般通用的等效电路模型是如图1所示的单二极管模型。
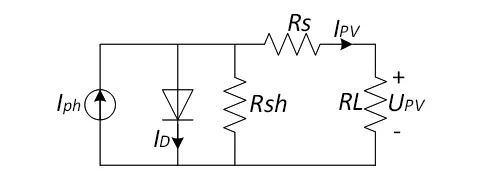
图1 光伏电池等效模型
1.1 光伏电池的工程实用模型
根据电路理论,结合工程模型的实用性要求,以下面两个理想条件为前提并结合光电池的出厂参数建立工程数学模型[8]。

由上述条件:

式中:IPV为光伏电池工作电流;UPV为光伏电池工作电压;IPh为光生电流;I0为二极管反向饱和电流;q为电子电荷;Rsh为电池体电阻、PN结扩散电阻、表面接触电阻以及内部线路总等效电阻(1Ω左右);Rs为PN结漏泄电阻(KΩ级别);A为二极管品质因子;K为波尔兹曼常数;T为绝对温度。
光伏电池的I-V特性可简化为:


忽略式(3)中的“-1”项解得:



1.2 温度、光强改变时光伏电池的工用模型

式中:Sref为参考日照强度;Tref为参考电池温度(25℃);T为电池温度;
ΔT为实际电池温度与参考温度之差;ΔS为太阳辐射变化值和参考太阳辐射值之比。
2 基于功率前馈的变步长直接占空比扰动法的MPPT研究
2.1 基于Buck电路的直接占空比数学模型
典型的扰动观察法[9]以电池输出电压为扰动变量,通过闭环反馈稳定后的状态来判断扰动方向,在快速性上或有不足[10]。该文对直接占空比扰动法做数学分析。
DC / DC中Buck拓扑的输入功率为Pi,输入电压为Ui,输出功率为P0,整个阻抗匹配单元的效率为η,输出等效负载为RL,Buck电路占空比为D,则根据电路分析可以建立如下等式:

则当DC / DC电路效率η、太阳能组串的P-U输出特性、等效负载RL确定时,由式(13)可知占空比与电池组串输出功率存在确切的二次方的正相关函数关系,以此为理论依据设计算法[11-13]。
2.2 基于功率前馈的变步长直接占空比扰动法算法设计
算法流程图如图2所示,首先采样k时刻的电压和电流,计算瞬时功率并与上次占空比改变之后的瞬时功率值进行比较,若比较的结果大于某阈值ε,则采用步进值较大的占空比扰动步长进行,若不然则采用较小的步进值。选择合适的步进值之后,经过响应逻辑判断占空比步进的方向,随后更新占空比的大小,结束一个循环。
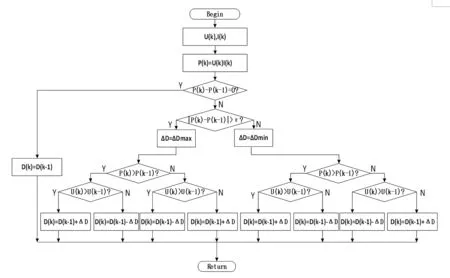
图2 基于功率前馈的变步长直接占空比控制扰动观察法
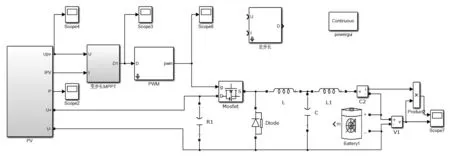
图3 整体仿真模型
本算法的特别之处在于步长的选择是基于前一步长所带来的功率变化量确定的,这样即可以保证,在单步功率变化较大的情况下,采用大步长进行追踪,有提高快速性的优势;而在单步功率变化情况较小的情况下,采用微步长进行追踪,这样做的好处是,在临近最大功率点的地方,小步长可以减少功率的振荡所带来的损失,提高追踪的稳定性。
2.3 基于功率前馈的变步长直接占空比扰动法的MPPT的仿真研究
在Simulink中搭建光伏电池的工程仿真模型如图3所示。
(1)光照强度改变时光伏电池的仿真
为了模拟实际中太阳辐射强度改变,本仿真中使用信号发生器给予阶跃信号。
首先采用步长为0.002的定步长直接占空比法。仿真效果如下图4、5依次为功率、功率细节变化图像。
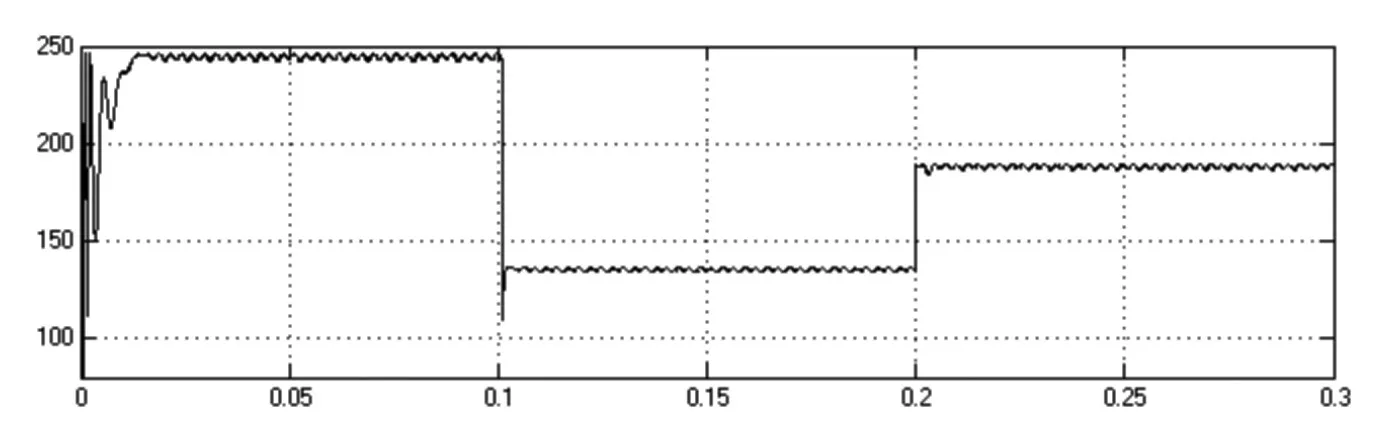
图4 功率
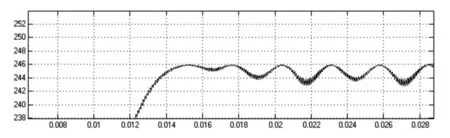
图5 功率细节
由图5可见,在追踪速度上,0.018s时,定步长算法达到稳定,其追踪效果为在最大功率点处持续振荡,最大峰峰值为246W左右。
图5中稳定后的功率曲线呈现两种幅值不等的周期性振荡特性,该现象出现的原因在于步长固定的情况下,在最大功率点的左右两侧,其功率曲线呈现不同的斜率,则同等步长下功率的振荡幅值是不同的。
再采用变步长算法,步长分别取0.002与0.0001,仿真效果如图6、7,依次为功率、功率细节的变化图像。

图6 功率变化图像

图7 功率细节变化图像
由图7可见,在追踪速度上,0.016s时,改进后的变步长算法达到稳定,其追踪效果为在最大功率点处振荡,最大峰峰值约为246W。
对比改进前后的算法仿真效果,可以清楚的看到,在最大功率点追踪快速性提高的同时,最终达到稳定后振荡的功率曲线平稳性也有了很大的提升[14]。
(2)温度改变时光伏电池的仿真
为了模拟温度变化,同样采用信号发生器给予阶跃和斜坡信号,如下图8所示[15]。温度先是处于25℃,然后斜坡上升至70℃,在经过一段时间后,又阶跃至45℃。
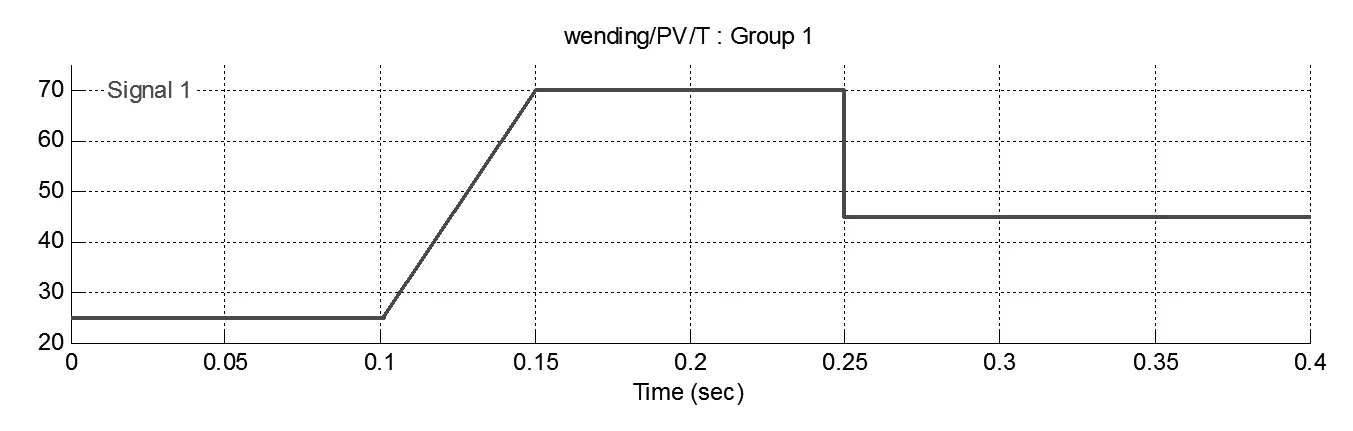
图8 模拟温度变化
定步长直接占空比扰动的仿真如图9、10依次为光伏电池的功率、功率细节的变化图像。
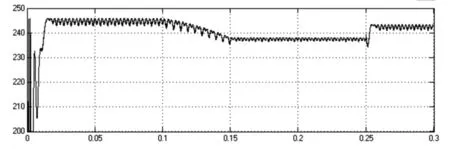
图9 光伏电池的功率变化

图10 功率细节变化
使用改进后的算法仿真效果如图11、12所示。
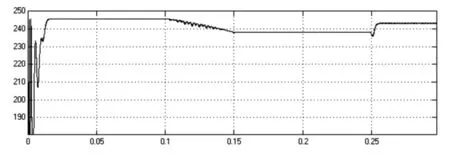
图11 光伏电池的功率变化图像

图12 功率细节变化图像
据上述图9、10与图11、12进行比较可以看到,随着温度的斜坡上升或者阶跃变化,使用定步长直接占空比爬山法,功率曲线的震荡幅度比较大,使用改进后的算法既能改善这一现状又能减少功率损失[16]。
由上述对比可知,改进后的变步长直接占空比扰动观察法在快速性,平稳性方面均较原有的算法优良,能够有效减少扰动观察法的功率振荡损失。
3 结论与展望
该文就工程用的四参数光伏电池做了仿真分析,并结合已有的直接占空比扰动观察法做了改进,提出一种基于功率前馈的变步长直接占空比扰动法,通过Simulink分析了其在快速性,稳定性方面的优势之处,但也存在不足之处,关于扰动观察法自身特有的扰动方向“误判”问题,没有提出相应的解决方案,还需要在以后的研究中多做工作。
[1]刁虬令.风光发电系统MPPT控制策略的研究[D].大连理工大学,2014.
[2]徐锋.一种基于模糊控制的光伏发电系统的MPPT控制[J].电源技术,2014,38(1):92-96.
[3]刘立群,王志新,顾临峰.基于改进模糊法的分布式风光互补发电系统MPPT控制[J].电力系统保护与控制,2011,39(15):70-74.
[4]孙自勇,宇航,严干贵,等.基于PSCAD的光伏阵列和MPPT控制器的仿真模型[J].电力系统保护与控制,2009,37(19):61-64.
[5]Kumari J S,Babu C S.Mathematical Modeling and Simulation of Photovoltaic Cell using Matlab-Simulink Environment[J].International Journal of Electrical & Computer Engineering,2012,2(1):26-34.
[6]周明,赵洪超,黄坤,等.基于Matlab/Simulink的光伏电池建模与仿真[J].电子质量,2015(4):72-76.
[7]陈杏灿,程汉湘,彭湃,等.光伏电池的建模与光伏发电系统的仿真[J].广东电力,2016,29(2):25-29.
[8]徐锋,郑向军,徐钰.电流预测的电导增量法在光伏MPPT中的应用[J].自动化仪表,2014,35(6):31-34.
[9]金薇.太阳能电池最大功率点跟踪技术研究[J].电子科技,2015,28(3):150-153.
[10]Sridhar R,Jeevananathan D,Selvan N T,et al.Modeling of PV Array and Performance Enhancement by MPPT Algorithm[J].International Journal of Computer Applications,2010,7(5):35-39.
[11]刘玉明.光伏发电系统的一种MPPT控制算法的研究[D].青岛大学,2012.
[12]Bianconi E,Calvente J,Giral R,et al.Perturb and Observe MPPT algorithm with a current controller based on the sliding mode[J].International Journal of Electrical Power & Energy Systems,2013,44(1):346-356.
[13]杨天明,丁喆.基于扰动观察法的光伏发电系统MPPT控制算法研究[J].电源技术,2013,37(1):69-70.
[14]王伟利.太阳能光伏系统MPPT控制算法的对比研究[C]//中国航海学会船标专业委员会2007年沿海、内河航标学组联合年会,2006:535-539.
[15]黄舒予,牟龙华,石林.自适应变步长MPPT算法[J].电力系统及其自动化学报,2011,23(5):26-30.
[16]Lee J H,Bae H,Bo H C.Advanced Incremental Conductance MPPT Algorithm with a Variable Step Size[C]//Power Electronics and Motion Control Conference,2006.Epe-Pemc 2006.International.IEEE,2006:603-607.
