基于滑模鲁棒算法的超低频主动隔振系统∗
2018-03-18罗东云程冰周寅吴彬王肖隆林强
罗东云 程冰 周寅 吴彬 王肖隆 林强
(浙江工业大学理学院,光学与光电子研究中心,生物与医学物理信息技术协同创新中心,杭州 310023)
1 引 言
重力加速度的高精度测量具有重要的科学意义和实用价值.高精度重力加速度测量仪器可以用于地球物理研究、矿产资源勘探、环境监测、油气普查、地质调查等领域,应用前景非常广阔[1−3].冷原子干涉型重力仪具有高精度和长时间连续稳定测量的优点,是近年来兴起的一种新型高精度绝对重力仪[4−7].目前冷原子干涉型重力仪的灵敏度已经达到4.2×10−9g·Hz−1/2,在100 s的积分时间内重力加速度测量分辨率可以优于0.5µg[8].
拉曼激光反射镜的振动对冷原子重力仪的测量精度有很大的影响.高频振动可以用被动隔振平台加以隔离.但对低频振动而言,被动隔振平台不起作用或作用很小.因此,超低频隔振技术在冷原子重力仪的测量中十分重要[9−11].譬如,对于总高度为1 m的原子干涉仪,原子干涉区距离一般约为20 cm,原子团从制备完成到探测位置的总下落时间约为200 ms.在下落时间内需要对原子的内态、动能进行控制并对原子施加拉曼光脉冲,置于原子重力仪底部的拉曼光反射镜的机械振动幅度应远小于拉曼光波长,否则频率为0.1—10.0 Hz的振动会使拉曼光的相位混乱,原子干涉信号将会被淹没在噪声中.斯坦福大学朱棣文课题组首次将主动隔振技术运用于原子干涉仪领域,其研制的主动隔振系统能将0.1—20.0 Hz的振动噪声压制为原始值的1/300,但是隔振系统体积庞大[12].Freier[13]开发了一个结构更加简单的主动隔振系统,能将0.03—5.00 Hz的振动降低至原始值的1/200.Tang等[14]在Freier的基础上精简了主动隔振系统的机械结构,在0.1—3.0 Hz频率范围内可以抑制99%的振动.Zhou等[15]使用三维隔振技术,将0.2—2.0 Hz的振动噪声压缩了98%,系统自振频率可以达到0.01 Hz.以上主动隔振技术都采用了超前滞后补偿滤波的控制方法.这种方法需要将较多的滞后滤波器串联以达到较高的开环增益和系统稳定的效果,而且需要整定的参数比较多.Freier[13]使用了3组滞后补偿滤波器,每组滤波器需要整定3个参数,包含1个增益系数和2个截止频率,而且在不同时间段的测量还可能需要对参数进行微调,整个控制器需要整定的参数达到9个,这样会给控制器的设计带来困难,并影响最后的隔振效果.
不同于以往的主动隔振系统,本文采用滑模鲁棒控制方法设计主动隔振系统,以解决冷原子重力仪中的拉曼反射镜振动问题.通过建立拉曼反射镜的振动数学模型,针对模型利用滑模鲁棒控制算法进行控制仿真.在此基础上设计隔振机械结构并构建实验平台,采用滑模鲁棒控制算法进行主动隔振实验.实验结果表明,与被动隔振平台隔振效果相比,构建的平台在0.1—10.0 Hz频段的残余振动噪声功率谱密度最大降低了99.9%;与在该平台上采用超前滞后补偿控制算法相比,残余振动噪声功率谱密度降低了83.3%,而且需要整定的参数只有3个.实验结果表明,滑模鲁棒控制主动隔振系统在控制效果上优于超前滞后补偿控制算法,而且整定参数少,响应快速,对参数变化及扰动不灵敏.
2 振动噪声对冷原子重力仪的影响
冷原子重力仪测定重力加速度的实验过程包括原子的冷却囚禁、选态、自由下落、原子干涉以及末态测量等步骤.若原子团相对于反射镜在竖直方向的位置为r[16],则拉曼光在原子团处的相位为

式中keff为拉曼光有效波矢.由此可见冷原子重力仪相位会受到反射镜位置变化的影响.为了使重力加速度测量更加准确,需要对反射镜进行振动隔离,相位的功率谱密度可以表示为

式中ω为振动的角频率,Sa(ω)为加速度的噪声功率谱.为冷原子干涉相位的方差,可以表示为



从(5)式可以看出,传递函数体现了原子干涉对不同振动频率的敏感程度.图1的计算中T=70 ms.从图1可以看出0.1—10.0 Hz的振动噪声对干涉仪影响最大.为了达到更高精度的测量灵敏度,必须对0.1—10.0 Hz频段的振动噪声加以抑制.

图1 振动噪声对重力仪的传递函数Fig.1.Transfer function of vibration and noise on the gravimeter.
3 隔振平台模型与控制算法设计
3.1 隔振平台模型
主动隔振系统的简化力学模型如图2所示.图中m为需要隔振的拉曼光反射镜以及支撑杆等负载的总质量,地面的振动通过阻尼c和弹簧传递给拉曼反射镜迫使镜子振动,弹簧的弹性系数为k,作动器会产生一个与镜子振动方向相反的力F来抵消其运动[17−20].由于原子重力仪只对地面振动的竖直方向敏感,所以主要研究竖直方向的隔振,x为地面振动的竖直方向位移,y为地面振动通过被动隔振平台传递给负载引起的位移.图2所示主动隔振模型是在有阻尼简谐振动模型中加入了抵消振动的作动器,其运动方程可以表示为


图2 弹簧振子主动隔振示意图Fig.2.Schematic of spring oscillator based active vibration isolator.
整个实验系统的反馈回路如图3所示.用一个被动隔振平台作为初级预隔振,隔离地面振动高于10 Hz的噪声信号,用地震仪实时测量被动隔振平台隔振面板的残余振动噪声,输出与振动速度大小成比例的差分电压信号,经过放大、滤波后通过滑模控制器.滑模控制也称为变结构控制,其控制策略与其他控制的不同之处在于可以根据系统当前的状态有目的地变化,迫使系统按照预定滑动模态的状态轨迹运动.由于滑动模态可以进行设计而且与对象参数及扰动无关,这使得滑模控制具有响应快、对参数变化及扰动不灵敏等优点.滑模控制器的输出信号再通过电压控制电流源(VCCS),将电压信号转换为对应频率的电流,电流信号通入音圈电机产生与电流成正比的电磁反馈力.该反馈力与地面振动产生的力大小相等,方向相反,能够互相抵消,从而使拉曼反射镜所在的被动隔振平台的弹簧处于平衡位置,保持静止状态[23,24].
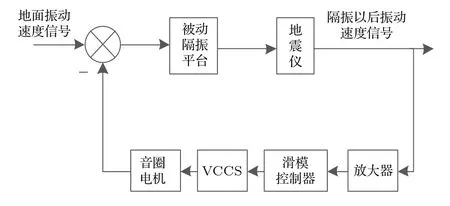
图3 反馈环路Fig.3.Feedback loop.
3.2 控制器设计
控制器输出的电压信号经过VCCS变成电流信号,其频率响应是平坦的,增益系数为KVC,电流经过音圈电机变成力F,音圈电机的输入电流与输出电磁力成比例,系数为YVC,运动方程(6)式可以改写为

式中u为控制器输出电压.设2ς0ω0=a,KVCYVC/m=b,,(7)式变为

(8)式中拉曼镜的振动信号用电压形式表示为

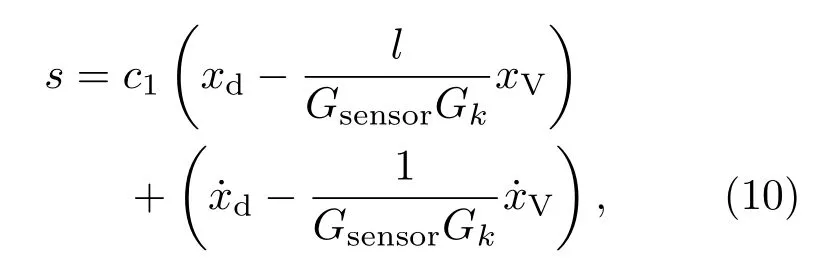
式中c1>0,xd=0为拉曼镜振动的位移的设定值,为其速度的设定值.滑模函数的导数为

采用指数趋近律,有

则滑模控制律为

由于符号函数sgn(s)很容易产生抖振,可以用饱和函数sat(s)代替(12)式理想滑动模态中的符号函数.sat(s)表达式为
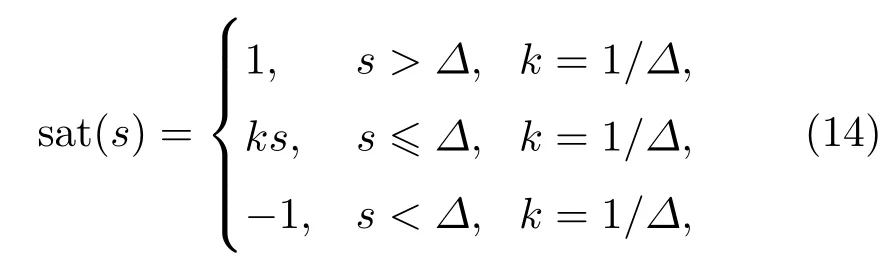
式中Δ为边界层.饱和函数的本质为在边界层外采用切换控制,在边界层内采用线性化反馈控制[25−27].dc的表达式为

式中dl,du分别为估计的地面振动位移的最小值和最大值.
3.3 仿真算例
根据建立的主动隔振平台模型和滑模鲁棒控制方法,利用MATLAB进行系统仿真验证,系统参数如表1所示.

表1 算例系统仿真参数Table 1.Parameters of simulation example.
选取地面振动位移输入干扰信号的频率值为0.2 Hz,也可以在0.1—10.0 Hz范围内取值,幅值为1×10−4m.滑模鲁棒控制器表达式为(14)式,其中需要整定的参数为滑模面系数c、指数趋近律系数ε和指数趋近律系数k.主动隔振效果如图4所示,从图中可以看出隔振效果十分明显.算例表明,基于滑模鲁棒控制算法的主动隔振方法是可行的.
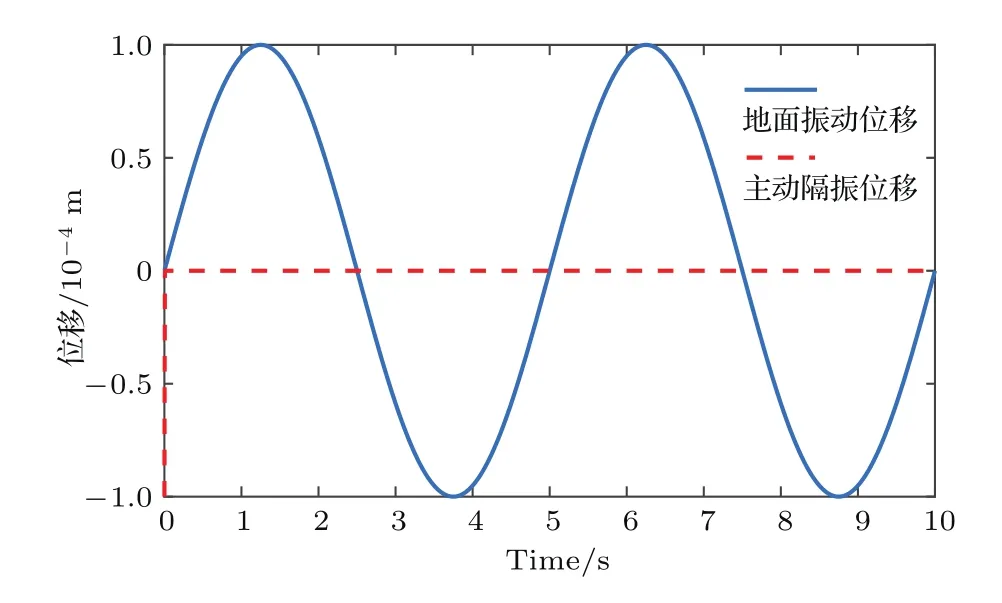
图4 滑模鲁棒控制主动隔振仿真效果Fig.4.Simulation result of active vibration isolation based on sliding-mode robust control.
4 实验验证
4.1 机械设计
主动隔振机械装置如图5所示,被动隔振平台自振频率设置为0.8,地震仪用来检测拉曼镜的振动速度.音圈电机适合微幅低频的场合,因此选择音圈电机作为作动器.由于音圈电机的线圈部分与永磁体部分的间隙只有0.38 mm,而且两部分相互独立[28],所以用一个二维移动平台来调节两部分的间隙,使之在运动过程中不发生摩擦.平台上的平衡块是为了使隔振面板保持水平,因为水平度会直接影响隔振效果[29].

图5 主动隔振机械装置Fig.5.Mechanical setup of active vibration isolation.
4.2 实验结果与分析
地震仪输出的残余振动噪声电压信号输入与电脑相连的振动数据采集模块,实时采集和存储振动信号,然后用电脑分析振动的噪声功率谱,用以评价隔振效果.采用滑模鲁棒控制方法对实验结果进行分析,并与传统的控制方式进行比较,具体实验结果如图6所示.图中红色线为采用被动隔振平台后的残余振动噪声功率谱,蓝色线为采用超前滞后补偿控制的残余振动噪声功率谱,黑色线为采用滑模鲁棒控制后的残余振动噪声功率谱.与被动隔振平台相比,系统在共振频率点0.8 Hz能达到99.9%的振动抑制水平,在0.4—0.6 Hz范围内能达到98%的振动抑制水平,在2—3 Hz范围内能达到90%的振动抑制水平,与超前滞后补偿控制算法相比,滑模鲁棒控制具有更好的振动噪声抑制水平.

图6 三种隔振方法的残余振动噪声功率谱密度对比Fig.6.Comparison of residual vibration noise power spectral density obtained by three different vibration isolation methods.
可以用(3)式来评估图6中主动隔振后残余振动噪声对原子重力仪相位的影响,不同振动频段对干涉仪相位的影响如图7所示.从图7可以看出滑模鲁棒控制主动隔振在0.1—10 Hz频率范围内对原子重力仪相位影响最小,在该频段积分以后,其对相位的影响为被动隔振对相位影响的14.7%,与超前滞后补偿控制相比相位影响降低了40.2%.

图7 三种隔振方法的振动噪声对干涉相位的影响Fig.7.Influence of vibration noise on the interference phase obtained by three different vibration isolation methods.
5 结 论
针对原子重力仪中拉曼镜的隔振需求,设计并研制了一套基于滑模鲁棒控制算法的主动隔振系统.通过建立隔振系统结构力学模型,设计针对该模型的滑模鲁棒控制算法,用MATLAB进行模拟仿真,结果表明该算法可以运用于主动隔振系统中.设计主动隔振机械结构和反馈回路等相关实验模块,用LabVIEW软件实现滑模鲁棒控制,经过该实验平台测试,在0.1—10 Hz振动频率范围内,振动噪声功率谱可在被动隔振的基础上得到进一步有效压缩,减小振动对原子干涉仪相位的影响,与超前滞后补偿控制相比隔振效果更好.
[1]Kasevich M,Chu S 1991Phys.Rev.Lett.B67 181
[2]Kasevich M,Chu S 1992Appl.Phys.B54 321
[3]Borde C J 1989Phys.Lett.A140 10
[4]Keith D W,Ekstrom C R,Turchette Q A,Pritchard D E,Kasapi S 1991Phys.Rev.Lett.66 2693
[5]Clauser J F 1988Physica B151 262
[6]Kasevich M,Weiss D S,Riis E,Moler K,Kasapi S,Chu S 1991Phys.Rev.Lett.66 2297
[7]Carnal O,Mlynek J 1991Phys.Rev.Lett.66 2689
[8]Hu Z K,Sun B L,Duan X C,Zhou M K,Chen L L,Zhan S,Zhang Q Z,Luo J 2013Phys.Rev.A88 43610
[9]Hauth M,Freier C,Schkolnik M,Schkolnik V,Senger A,Schmidt M,Peters A 2013Appl.Phys.B113 49
[10]Jacquey M,Miffre A,Buchner M,Trenec G,Vigue J 2006Appl.Phys.B84 617
[11]Zhou L,Xiong Z Y,Wang Y,Tang B,Peng W C,Hao K,Li R B,Liu M,Wang J 2011Gen.Relat.Gravit43 1931
[12]Hensley J M,Peters A,Chu S 1999Rev.Sci.Instrum.70 2735
[13]Frier C 2010Ph.D.Dissertation(Hamburg:Universität Hamburg)
[14]Tang B,Zhou L,Wang Y H,Xiong Z Y,Xiong Z Y,Wang J,Zhan M S 2014Rev.Sci.Instrum.85 093109
[15]Zhou M K,Xiong X,Chen L L,Cui J F,Duan X C,Hu Z K 2015Rev.Sci.Instrum.86 046108
[16]Peters A,Chung K Y,Chu S 2001Metrologia38 25
[17]Luan Q L,Chen Z W,Xu J R,He H N 2014Journal of Vibration and Shock33 54(in Chinese)[栾强利,陈章位,徐尽荣,贺惠农2014振动与冲击33 54]
[18]Chen X,Wang H,Tao W,Yang C L 2017Chinese Journal of Sensors and Actuators30 777(in Chinese)[陈希,王海,陶伟,杨春来2017传感技术学报30 777]
[19]Liu G D,Xu X K,Liu B G,Chen F D,Hu T,Lu C,Gan Y 2016Acta Phys.Sin.65 209501(in Chinese)[刘国栋,许新科,刘炳国,陈凤东,胡涛,路程,甘雨2016物理学报65 209501]
[20]Lu M M,Zhou J K,Lin J Q,Li Y C,Zhou X Q 2016Machine Tool&Hydraulics23 46(in Chinese)[卢明明,周家康,林洁琼,李迎春,周晓勤2016机床与液压23 46]
[21]Wei Y M,Liu X H,Fan Z C 2017Aerospace Control and Application43 1(in Chinese)[魏延明,刘旭辉,樊子辰2017空间控制技术与应用43 1]
[22]Sun Y F 2017Measurement and Control Technology34 80(in Chinese)[孙亚飞 2017测控技术34 80]
[23]Hu J P,Zheng C,Li K J,Liu C P,Hu Q 2015Noise and Vibration Control35 193(in Chinese)[胡均平, 郑聪,李科军,刘成沛,胡骞2015噪声与振动控制35 193]
[24]Dai X Z,Liu X Y,Chen L 2016Acta Phys.Sin.65 130701(in Chinese)[代显智,刘小亚,陈蕾2016物理学报65 130701]
[25]Li Z L 2015Ph.D.Dissertation(Wuhan:Huazhong University of Science and Technology)(in Chinese)[李子龙2015博士学位论文(武汉:华中科技大学)]
[26]Boulandet R,Michau M,Herzog P,Micheau P,Berry A 2016J.Sound.Vib.378 14
[27]Liu L 2011Ph.D.Dissertation(Harbin:Harbin Institute of Technology)(in Chinese)[刘磊 2011博士学位论文(哈尔滨:哈尔滨工业大学)]
[28]Xia Z W,Wang X T,Hou J J,Wei S B,Fang Y Y 2016J.Low Freq.Noise.Vib.Act.Control35 17
[29]Alou fiB,Behdinan K,Zu J 2016Smart Mater.Struct.25 125004
