改进的RANSAC圆检测算法
2018-03-07邓仕超韩海媚
邓仕超, 高 阳, 韩海媚
(桂林电子科技大学 机电工程学院 广西 桂林 541004)
0 引言
图像处理中常用的圆检测算法有:基于Hough变换的圆检测[1-2]算法;基于随机抽样一致性(random sampling consistency,RANSAC)算法的圆检测.Hough变换圆检测算法要遍历三维参数空间,对内存和时间的消耗特别大,且检测结果精度受参数离散化程度的影响也大.文献[3]提出了随机Hough变换(RHT)算法,该算法随机抽取图像空间中的3个点,对应到参数空间中的1个点,再从参数空间中选取候选圆并进一步挑出真实圆,从而大大减少了内存消耗.RANSAC算法[4]与RHT算法相似,但其抽样的目的在于估计出一个能包含尽可能多的边界点的圆模型,只用圆模型上的点来拟合真实圆.这两种算法的共同缺点在于大量圆外点会带来大量无效抽样和累积.文献[5]用梯度法预先判断3点是否在候选圆上,减少了无效采样,但计算梯度本身也要消耗不少时间.文献[6]则对每条连续边界3等分,再分别取点进行圆拟合,该方法仅对连续边界进行取样,大大减少了对无效点的抽样.但这两种改进算法都只用3个点得到圆参数,准确度有限.文献[7]用最小二乘法改进了RHT算法,先用4点确定初始圆参数,再对得到的圆上点迭代使用最小二乘法,直至没有新点加入,该方法准确性较好,但所需迭代次数受初始参数影响大.本文设计了一种改进的RANSAC圆检测算法,可以进一步减少检测圆所需时间并保证其准确度.
1 RANSAC算法
传统RANSAC圆检测算法的具体步骤如下:
1) 对待检测的图像进行预处理及边缘提取,建立由所有边缘点坐标构成的点集D.令当前循环次数k=0.
2) 初始化局内点点集Inpts=NULL.从边界点点集D中随机抽取3个点,计算这3个点所确定的圆的参数[a,b,r](圆心(a,b). 半径r),若圆的半径r的范围在预设的范围之内,则转3);否则转6).
3) 计算各边界点到2)中所得到的圆的圆心的距离d,若|d-r|≤ε(ε为可接受的局内点偏离裕度),则认为该点为局内点,将其坐标存入局内点点集Inpts,否则视为局外点.
4) 计算该圆上的局内点点数M,若M大于阈值Mmin,则认为此次估计出的圆模型足够合理,这些局内点也可视为有效点,转5);否则转6).
5) 对点集Inpts中的所有点用最小二乘法重新计算圆的参数模型,得到最终结果.
6)k=k+1,若k>Kmax,则结束;否则转2).
2 改进的RANSAC算法
传统RANSAC算法中抽样耗时占算法总耗时的比重较大,而非圆边界点(即局外点)的数量又是影响所需抽样次数的最主要的因素.所以,减少局外点数量对减少算法总耗时有较大作用.另外,传统算法通过三点预估圆方法选取的局内点点集的随意性较大,这使得最终得到的检测结果的随意性也较大,为改善这一点,可以考虑综合使用多组局内点点集进一步地拟合和筛选.本文根据以上思路对原算法进行改进.
2.1 图像预处理
为减少边缘提取中伪边缘带来的非圆边界点,本文在预处理环节中采用陷波滤波[8],针对性地滤去图像中金属本身的纹路.常用的边缘提取方法有:1) 使用Sobel、Canny等算子直接提取.2) 使用模糊分割等分割算法进行区域分割[9],再用形态学算法提取边缘.综合考虑算法准确性和耗时长短,本文使用Canny检测法进行边缘提取.待处理的图像如图1所示.提取出的边缘如图2所示.从图中可以看出,凹痕圆的边界基本被提取,金属纹路伪边缘大大减少.接着,为进一步减少凹痕固有的小裂纹带来的非圆边界点,本文对提取出的边缘进行连通域检测,并对检测出的所有8邻接连通区域进行标记.8邻接的示意图如图3所示.然后,将这些连通区域存储到一个元胞数组中,每1个元胞代表1个连通区域(即一条连续边界).最后通过统计的方法将小边界去除,仅对较长的连续边界进行抽样.
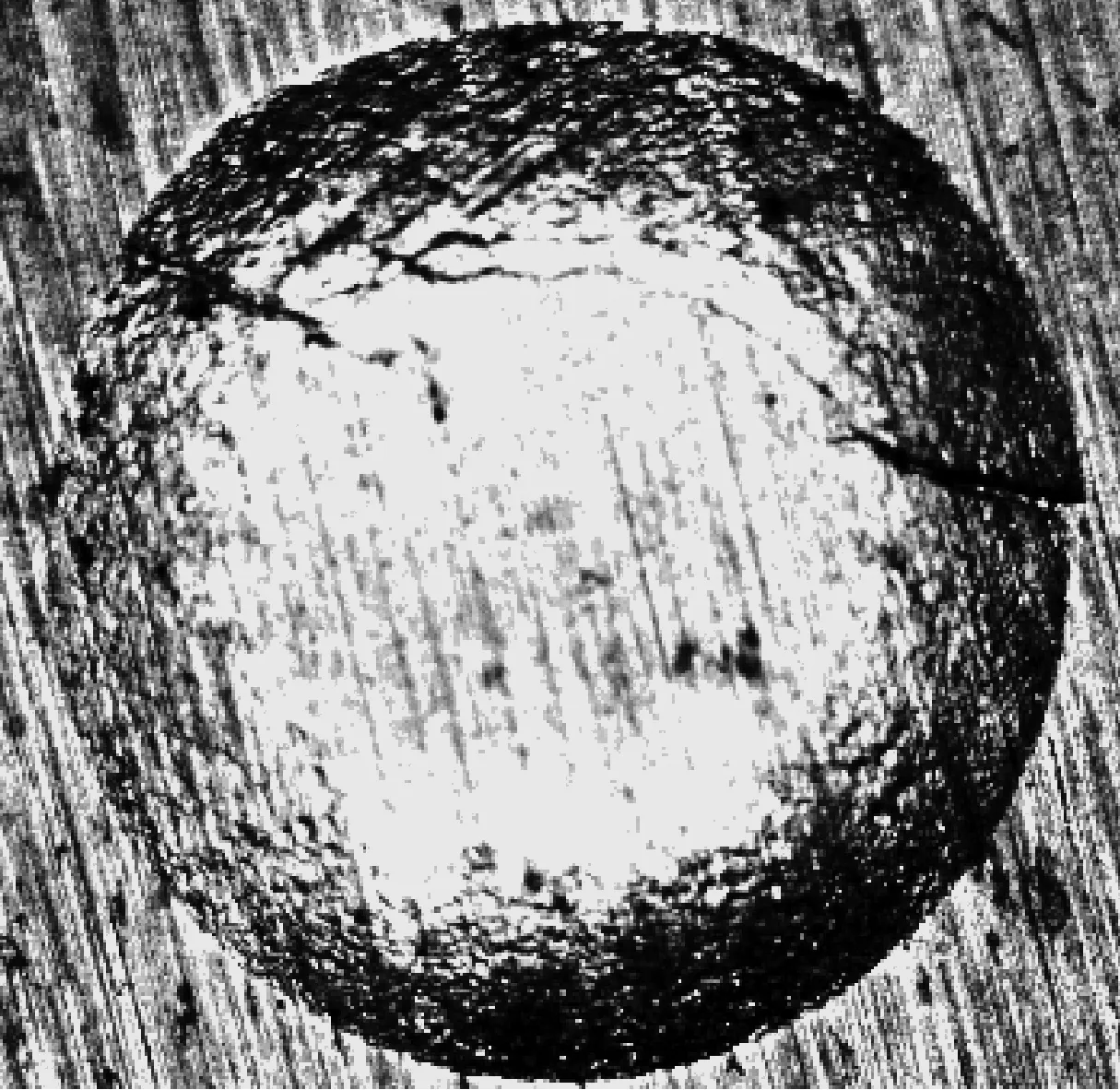
图1 待检测凹痕图像Fig.1 The picture of dent for detection

图2 图1中提取的边缘Fig.2 The extracted edge of Fig.1
图3 8邻接示意图Fig.3 The sketch of 8-adjacency pixels
2.2 三点估计圆参数
通常,由三点确定圆参数的方法是将三点的坐标代入圆的方程,联立三元方程求解得到.本文则利用圆的圆心到弦的中点的连线垂直于弦这一特性,联立二元方程求出圆心坐标,然后求圆心到任意一点的距离即可得出半径.由于只需求解二元方程,比原算法更为简便.
假设圆心坐标为Z(a,b),三点坐标分别为A(x1,y1),B(x2,y2),C(x3,y3),可以得到二元方程:
(1)
从而可以很容易地得到圆心坐标(a,b),而半径即为[5]
2.3 寻找候选圆
在判定某点是否属于局内点时,本文由原判定公式|d-r|≤ε,得出(r-ε)2≤d2≤(r+ε)2,若设某次估计出的圆的圆心为Z(a,b),某点坐标为I(xi,yi),则该公式变成(r-ε)2≤(xi-a)2+(yi-b)2≤(r+ε)2,从而避免了原方法中计算边界点到圆心的距离d时的开方运算,加快了速度.
若抽样所得圆的局内点个数大于阈值Mmin,则可判定该圆为候选圆.由于后期还有进一步的筛选,阈值可以根据多次试验的结果取一个相对较小的值以减少抽样时间.如果是第一次取到候选圆,我们可以综合原来判定候选圆局内点时的阈值ε估计出一个阈值ε2(ε2>ε),并认为满足|d-r|>ε2的点不属于所求圆的边界并将其排除,仅对剩下的点抽样以进一步提高后续抽样取到候选圆的概率.实验证明,在第一次得到候选圆后,可以很容易地连续得到候选圆.
如果在随机抽样中,已经有3~4次能够得到候选圆,那么真实圆的边缘存在于这些候选圆局内点中的概率就已经很大了.再继续抽样的意义不大.为控制总的检测时间,本文以4次为阈值,只要4次取到候选圆,就可以结束抽样循环
2.4 确定最终圆参数
得到候选圆后,用最小二乘法对以上候选圆的局内点再进行圆拟合,可以得到更为精准的候选圆[10].然后,设定一个很小的距离阈值ε3(ε3<ε),把原局内点中到新圆的边缘的径向距离小于阈值ε3的点作为新候选圆的局内点,比较各新候选圆局内点的个数N,选择N最大的新候选圆作为最终真实圆.相比原算法只选出一个候选圆进行最小二乘法拟合,本算法对多个候选圆进行拟合与精选,可以得到更准确更稳定的结果.
2.5 本文算法的具体步骤
1) 对待检测的图像进行预处理及边缘提取,检测边缘点中所有的8邻接连通区域,排除长度较小的连通域,用剩余的较长的连续边界上的点构建边界点集D,初始化候选圆局内点单元集Pcir=NULL,候选圆参数单元集P=NULL,当前循环次数k=0,候选圆个数Nt=0.然后,为最大抽样次数Kmax设定一初始值.
2) 初始化局内点点集Inpts=NULL.从边界点点集D中随机抽取3个点,计算这3个点所确定的圆的参数[a,b,r](圆心(a,b),半径r),若半径r的范围在预设的圆的半径范围之内,则转3);否则转6).
3) 计算各边界点到2)中所得到的圆的圆心的距离d,若|d-r|≤ε(ε为可接受的局内点偏离圆的边缘的裕度),则认为该点为局内点,将其坐标存入局内点点集Inpts,否则视为局外点.
4) 计算该圆上的局内点点数M,若M大于阈值Mmin,则认为该圆可以作为候选圆,将局内点点集Inpts作为一个单元pcir,存入候选圆局内点单元集Pcir,转5);否则转6).
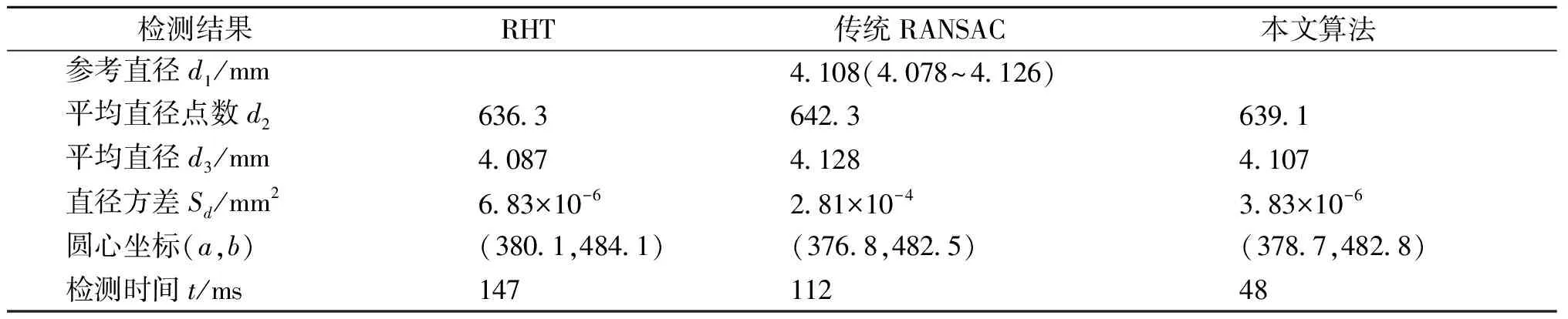
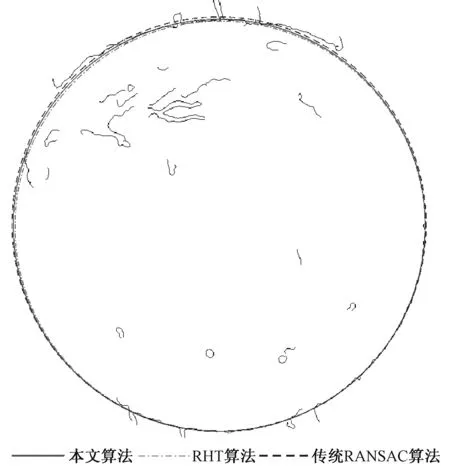
5)Nt=Nt+1,若Nt≥4,则结束循环,转8);若Nt=1,则计算边界点到该候选圆的圆心的距离d,从边界点点集D中排除满足|d-r|>ε2的点,再转6);若1 6)k=k+1,若k>Kmax,则结束循环,转7);否则转2). 7) 若Nt<2,则Kmax自加10,再转2);否则转8). 8) 对各候选圆局内点单元pciri(i=1, 2,…,Nt)分别进行最小二乘法圆拟合,将得到的新的候选圆参数pi=[ai,bi,ri]作为一个单元存入候选圆参数单元集P中,计算各候选圆的局内点到由该候选圆重新拟合出的圆心[ai,bi]的距离di,从这些局内点中找出满足|di-ri|≤ε3的局内点,并排除pciri中其他的点.初始化候选圆局内点数目集NP=NULL,将新的候选圆局内点的个数存入NP中.比较各候选圆的局内点个数,找出局内点个数最大的候选圆,并将其参数[ai,bi,ri]作为最终得到的真实圆的圆参数. 为了检验本文算法的有效性,用该算法在VS2013平台下编写了实验程序,并将其用于布氏硬度压痕直径自动化测量仪器研制中.图1即为用HB-3000B硬度计,10 mm直径淬硬钢球在用正火处理过的T10钢板上压出的凹痕图像,实验载荷为29.42 kN,成像用的CCD像素数为1 920×1 560.本实验用该方法在同一块钢板上共得到了10个凹痕(凹痕分布相对集中).实验要求测出凹痕直径并查表得出布氏硬度值[11].本文分别用上述3种算法对这10个凹痕进行检测,其结果如表1所示.其中随机Hough变换(RHT)圆检测算法的具体步骤见文献[3]. 表1中的参考直径是用读数显微镜对这10个凹痕进行测量所得到的直径的平均值(括号内为测量所得直径的取值范围).从表中可以看出,本文算法所得直径相比其他两种算法更接近参考值,测量结果的方差也比其他两种方法更小.因此,本文算法提高了测量结果的准确性和稳定性.从检测时间上看,本文算法的耗时也明显比其他两种算法更短. 表1 3种算法检测结果 用以上3种算法检测得到的圆参数在图2所示的边缘图像上画圆,其对比效果如图4所示.从图中可以看出,3种算法检测出的圆对左上角的边缘的贴合程度有微小差异.为了更清楚地看出这些差异,图5为图4左上角的局部放大图.从图中可以看出,本文算法所得结果对图像边缘的贴合效果也优于其他两种算法. 图4 3种算法拟合的圆的对比Fig.4 The differences among the fitting circles in three algorithms 图5 图4的局部放大图Fig.5 The partial enlargement of Fig.4 本文对传统的RANSAC圆检测算法从无效点的排除、候选圆的选取、真实圆的确定等方面进行了改进,实验结果表明,该算法结果在准确性、稳定性、运算时间3个方面均明显优于传统RANSAC圆检测算法,而且也优于目前常用的RHT圆检测算法,完全能够满足实时检测需求. [1] LI G Q,ZHANG L X,YU Z P,et al.Research of edge detection algorithm based on Canny algorithm and Hough transform[J].Advanced materials research,2014,1039:262-265. [2] BOUKHAROUBA A.A new algorithm for skew correction and baseline detection based on the randomized Hough transform[J].Journal of King Saud university-computer and information sciences,2017,29(1):29-38. [3] 王新,张元东,王莉.一种随机Hough变换检测圆的优化方法[J].测控技术,2016,35(6):112-116. [4] 袁清珂,张振亚,毕庆.改进的RANSAC算法在直线拟合中的应用[J].组合机床与自动化加工技术,2015,1(1):123-125. [5] 袁理,曹智睿.改进的随机Hough变换圆检测算法[J].计算机应用,2010,30(S1):174-176. [6] 陈小艳,王强,李柏林.改进的Hough变换检测圆方法[J].计算机系统应用,2015,24(8):197-201. [7] 霍建亮,曾翎,王德胜,等.基于最小二乘法改进的随机圆检测算法[J].光电工程,2011,38(5):145-150. [8] 阮秋琦.数字图像处理学[M].北京:电子工业出版社,2013. [9] 刘洪普,杨乐,侯向丹,等.一种改进的模糊C均值图像分割算法[J].郑州大学学报(理学版),2017,49(2):66-71. [10] 牛方君,曹慧慧.利用最小二乘法测量半径样板半径[J].电子产品可靠性与环境试验,2015,33(6):56-58. [11] 文九巴.金属材料学[M].北京:机械工业出版社,2011.3 实验结果

4 结论
