基于加速因子不变原则的加速度计可靠性分析
2018-03-06盖炳良滕克难王浩伟韩建立李高春
盖炳良,滕克难,王浩伟,韩建立,李高春
(海军航空大学,烟台 264001)
加速度计是测量载体加速度的机电产品,广泛应用于各类军用和民用惯导系统中,是惯导系统的关键部件。在其工作或长期贮存中,因标度参数等关键性能参数的退化而导致产品失效[1]。随着生产工艺提升,加速度计产品可靠性不断提高,使得传统可靠性分析方法耗时耗费,因而基于加速退化数据的可靠性分析方法得到广泛研究和应用。
Wiener过程能够对非单调性的加速退化数据进行建模,适合加速度计产品的退化建模[1-2]。在Wiener退化建模中,考虑到产品制造工艺、工作环境等个体差异的客观存在,基于随机影响的Wiener退化模型得到深入研究。正常工作应力下,Peng[3]提出将Wiener模型的漂移参数μ考虑为服从正态分布的随机变量以体现个体差异,而扩散参数σ相同。此后,Bian[4]、Si[5]、Liao[6]、Li[7]、Tang[8]等都采用了该模型。之后,Peng[9]、Wang[10]、Pan[11]提出了考虑偏态正态分布等更一般性的模型。为便于描述,将该类模型记为RD模型,将不考虑个体差异的Wiener模型记为SM模型。RDV模型(即Wiener模型)的漂移参数μ和扩散参数σ都是随机变量,如Wang[12]采用w=σ-2Gam(a,b)、μwN(1,ew)模型,徐廷学[13]、蔡忠义[14]则采用w=σ-2Gam(a,b)、μwN(h,ew)模型,其中a、b、e、h都是待定参数。目前,尚未见单独考虑Wiener模型中扩散参数σ是随机变量的具体应用,可将其记为RV模型。
加速应力作用下,SM 模型中在确定应力与参数关系时主观性较大,有不同的假定。Padgett[15]、Liao[16]、Lim[17]、Sung[18]、Hu[19]等都假定漂移参数μ与加速应力相关,而扩散参数σ与加速应力无关。针对假定参数与加速应力的关系过于主观性,王浩伟[20]、Wang[21]等采用加速因子不变原则,推导得到μ、σ与加速应力都相关,且在Sk、Sh任意两个应力作用下应满足如下约束关系
加速应力作用下,考虑个体差异的模型处理方式目前有两类:① Tang[22]、Chen[23]、Cai[24]等在SM模型基础上,通过假定漂移参数μ的Arrhenius加速模型中某个参数是服从正态分布的随机变量来体现个体差异;② Sun[25]在RD模型基础上,应用加速因子不变原则,将μ、σ的加速模型引入RD模型。
综上,在加速退化数据可靠性分析中,目前大多数研究都是基于SM模型。为使模型更具适应性而考虑个体差异的模型,多数通过随机加速模型体现个体差异,而随机加速模型中随机变量是假定确定的,具有主观性;而Sun[25]以RD模型为基础,同时引入加速模型,然而其考虑的加速模型是以SM模型为基础推导得到的结论,不能全面体现出加速应力作用下RD模型参数与加速应力的约束关系。另外,在确定模型时,现有的文献大多都只选择一种模型,在参数估计后按照Wiener过程的统计特性对模型进行适用性检验,这能确定该模型是否适用,但不能解决所用模型是否相对最优。
基于以上分析,本文采用加速因子不变原则,推导得到RD、RV、RDV三类模型参数与加速应力的约束关系,并采用QQ图、DIC值、后验样本箱线图等方法进行模型综合择优选择。
1 考虑随机影响的Wiener过程
SM模型:X(t)=μΛ(t)+σB(Λ(t)),X(0)=0,Λ(t)为时间函数,Λ(0)=0,μ为漂移参数,σ为扩散参数,B(⋅)为标准Brown运动函数。平稳独立增量ΔX(t)服从正态分布:
ΔX(t)~N(μΔΛ(t),σ2ΔΛ(t)),
ΔX(t)=X(t+Δt)-X(t),ΔΛ(t)=Λ(t+Δt)-Λ(t)。
设失效阈值为D,X(t)首次到达D的时间为T=inf{tX(t)≥D},则T服从Inverse Guassian分布[2],可靠度函数为

RD模型:假设μ服从分布μN(μμ,μσ),由全概率公式可得无条件密度函数frd(X(t)),由文献[22]可得可靠度函数Rrd(t)如下:

RV模型:假设ϖ服从分布ϖ=σ-2Ga(a,b),其中ϖ=1σ2,则:


式中,F(2a)是自由度为2a的t分布累积分布函数。
RDV模型:假设μ、ϖ服从共轭先验分布ϖ=σ-2Ga(a,b),μ ϖN(h,eϖ),其中a、b、h、e是超参数,则可推导得到:


2 加速退化建模
2.1 加速因子不变原则
任意两个应力水平Sk、Sh下的累积失效函数Fk(Λk)、Fh(Λh),当Fk(Λk)=Fh(Λh)时,定义Sk相当于Sh的加速因子AFk,h为AFk,h=ΛhΛk。加速因子不变原则指出AFk,h是一个只有Sk、Sh所决定的常数,而与Λk、Λh时间变化无关。当Λ是时间函数时,有:

即

2.2 确定加速应力与参数关系
SM模型:文献[26]推导得到如下关系式:

在温度应力T作用下,μ(T)=e xp(γ1-γ2T),σ(T)=e xp(γ3-0.5γ2T),γ1、γ2、γ3都是未知参数,Wiener SM的加速退化模型为:

RD模型:将式(3)代入式(9),可得:




为确保AFRD是不随时间变化的常数,则需满足:

整理可得:

RV模型和RDV模型推导过程类似,限于篇幅,给出结论如下:

2.3 建立相关参数的加速模型
以温度T为加速应力,采用Arrhenius加速模型描述参数与应力的变化关系。
RD模型:温度应力下参数可表示为

σ=
其中,γRD(1)、是待定参数。

RV模型:温度应力下参数可表示为:

由式(12)可得:γRV(2)=γRV(4)。将加速模型代入式(6),RV模型可靠度函数如下:

RDV模型:温度应力下参数可表示为
由式(13)可得:γRDV(2)=γRDV(4)=γRDV(6)。将加速模型代入式(8),RDV模型可靠度函数为

3 参数估计和模型选择
通过 OpenBUGS软件采用马尔科夫-蒙特卡洛(MCMC)抽样方法实现参数估计,该方法首先确定参数先验分布,无可靠先验信息,则可选择较大区间均匀分布等无信息先验,然后采用 MCMC方法求后验参数估计值。OpenBUGS软件求解主要包括先验分布表达、似然函数表达,以及退化数据表达和初始值的设定。图1所示是RV模型求解中先验分布表达和似然函数表达的实现。

图1 参数估计OpenBUGS实现Fig.1 Parameter estimation by OpenBUGS
基于数据拟合的随机过程建模的模型选择:①首先模型验证。Wiener过程 ΔX(t)N(μΔΛ(t),σ2ΔΛ(t)),即通过 Kstest命令验证样本是否服从标准正态分布。分位数图(QQ图)是对样本分位数和标准正态分位数的比较,因而也可通过 QQ图更直观地判断模型对数据的拟合情况;②箱线图分析。参数的后验样本箱线图能显示参数的均值、中位数等分布特征。在模型通过统计特性验证的基础上,通过比较所有样本的参数箱线图,可以很直观判断μ、σ等参数在不同样本中是趋于相同还是具有明显的差异;③偏差信息基准(DIC)值分析。DIC值定义为是似然函数,pD是估计参数数目,即DIC是模型期望偏差与表示模型复杂度的估计参数数目之和。DIC值越小表示模型拟合越好,模型选择时可以对多个适用模型通过DIC值进行择优选择。
4 实例验证
为了对某型宝石轴承支撑摆式加速度计进行可靠性分析,文献[1-2]都对恒定应力加速退化试验数据进行了分析,该试验以温度为加速应力,选取18个样品,分成3组,每个加速应力下样本量为6,加速应力分别为T1=338.16K,T2=348.16K,T3=358.16K 。性能退化量为一次项标度因数相对于初始值的偏差值,失效阈值D=0.006,退化数据详见文献[1]。
对加速退化数据分别采用4类Wiener模型建模,参数估计值如表1所示。

表1 参数估计值Tab.1 Parameter estimation values
由Wiener过程的统计特性检验表明,RV模型各样本都接受标准正态分布,而SM模型第8个样本,RD模型第8、12、17个样本,RDV模型第6、12、13、14、16、17、18个样本都不接受标准正态分布。图2所示是4类模型的QQ图,通过QQ图可较直观反映出各模型对数据的拟合情况,RV和RDV模型拟合较好。SM、RD、RV、RDV 模型的 DIC值分别是-2702.6、-2767.7、-2817.1、-2803.5,也表明RV模型拟合较好。

图2 QQ图Fig.2 Quantile-quantile plot
图3所示是RV模型参数σ后验样本箱线图,可发现18个样本σ有较明显的个体差异。

图3 σ后验样本箱线图Fig.3 Box plots of posterior densities of σ
综上分析,可确定4类模型中RV模型拟合更好。
RV模型中参数应满足式(12)约束关系,而在3个温度应力下可形成如下 3个点:理论上3点应在直线上。参数估计时由后验样本计算可得[μT1,μT2,μT3] =[4.315× 10-13, 1.501× 10-12, 4.966× 10-12],[bT1,bT2,bT3]=[3.94×10-16, 1.384× 10-15, 4.625× 10-15],即(3.479, 3.513)、(3.3085, 3.3418)、(11.509, 11.739)这三个点(如图4所示)与直线距离偏差小,验证了约束关系成立。

图4 参数变化规律验证Fig.4 Validation of change rule of model parameters
将表1中RV模型参数估计值,代入式(17)可推得正常应力T=293.16K 时的可靠度函数:

可靠度曲线如图5所示,同时比较了文献[2]结果。采用文献[2]方法,即采用SM模型的可靠性分析结果过于乐观,会造成较大的偏差。按照RV模型可求得该型加速度计平均贮存寿命为184560 h,可靠贮存寿命(可靠度值为0.9)为158221 h。
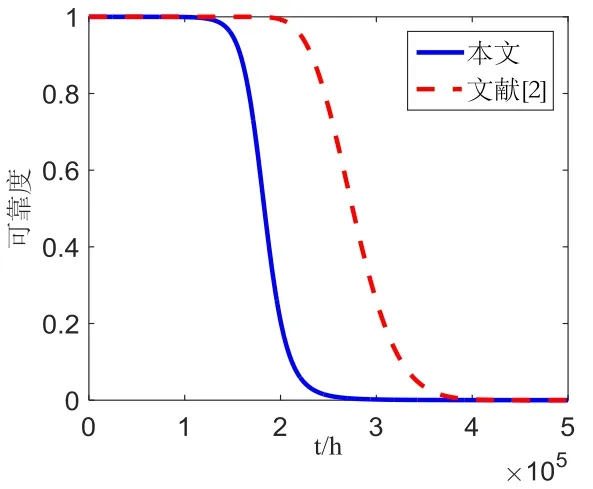
图5 可靠度曲线Fig.5 Reliability curves
5 结 论
本文以加速度计加速退化数据为对象,提出了一种基于加速因子不变原则的加速退化数据可靠性分析方法,考虑了三类随机影响模型,并采用多种方法综合选择相对最优模型。主要结论为:
①加速因子不变原则是确定退化模型参数变化规律,进而正确建立加速退化模型的有效方法。
②RD模型中漂移参数的超参数μμ、μσ以及扩散参数σ和加速应力相关,并且在任两个应力下满足约束关系RV模型中漂移参数μ以及扩散参数的超参数b和加速应力相关,并且在任两个应力下满足约束关系μk/μh=bk/bh;RDV模型中超参数b、e、h与加速应力相关,并且在任意两个应力下满足约束关系hk/hh=ekeh=bk/bh。
③考虑个体差异的加速退化模型,具有更好的适应性;基于QQ图、DIC值、箱线图综合选择模型的方法,能确定相对最优模型,为提高建模精度提供了有益参考。
