矢量频率跟踪辅助锁相环的设计与实现
2018-03-06吴雨航邓若凡
王 前,金 天,吴雨航,邓若凡
(1. 西安邮电大学 电子工程学院,西安 710121;2. 北京航空航天大学 电子信息工程学院,北京 100191)
矢量频率锁定环路(VFLL)是矢量跟踪环路的一种,最早由Pany等提出[1],其设计思想与较早出现的矢量延迟锁定环路(VDLL)类似,都是采用多通道联合处理的方式进行载波频率或码相位的跟踪[2]。然而传统 VFLL环路无法准确跟踪载波相位,不能利用载波相位平滑伪距,导致定位精度和测速精度不够高。
针对上述问题,研究人员开始将VFLL与锁相环(PLL)结果相结合。由于VFLL环路相比于传统频率跟踪环路(FLL)具有更高的频率跟踪精度,因此融合之后的跟踪环路理论上能够提高跟踪环路的性能。前期研究人员的融合方法种类较多。Stefan等人的仿真结果[3]表明,可以将PLL环路的结果与VFLL环路进行融合来提高环路相位跟踪精度。Deambrogio和 Macabiau等人的文章用矢量方法提升了电离层闪烁情况下的载波跟踪性能[4]。胡辉等人的研究结果指出对于高动态的 GPS载波跟踪需要多种手段的组合[5]。Jiang等人利用模糊逻辑的方法将FLL与PLL跟踪进行融合[6]。Zhao等人的研究指出了矢量 PLL电文解调方法,并对此开展了理论性能分析[7]。谢非等人[8]提出了基于快速相关的矢量跟踪算法,使跟踪性能得到提升。
本文在上述研究基础之上,结合二阶FLL辅助三阶PLL(FAPLL)的结构,设计了一种将VFLL频率鉴别结果和PLL相位鉴别结果进行融合的方案,再通过载波相位平滑码伪距提高接收机伪距测量精度,给出了其理论性能分析,并通过软件接收机和模拟仿真数据进行了测试,验证了上述方法的性能提升。
1 设计思路
在传统接收机中,频率跟踪环路(FLL)只能够实现对频率的跟踪,无法获得载波相位信息。为精确获得载波相位信息,Ward等人提出了FLL辅助PLL算法(FAPLL)[9]。该算法将FLL和PLL计算得到的频率和相位鉴别结果进行了融合,通过FLL辅助PLL的方式获得较为精确的相位估计值。
随着矢量跟踪技术的发展,VFAPLL环路设计逐渐得到了重视。与传统FLL环路独立处理各通道不同,在VFLL环路中所有通道的载波跟踪结果被同时处理,充分利用了对于同一用户不同卫星运动状态之间的相关性,提升了载波频率的跟踪精度。
为了进一步提升跟踪性能,本文将VFLL代替传统的FLL来实现对PLL环路的辅助(VFAPLL)。图1所示为VFAPLL实现结构图。VFLL各个通道首先通过鉴频器得到各个通道频率测量值和频率测量误差,由卡尔曼滤波器融合全部通道的信息,最终给出载体速度估计值与接收机钟漂。
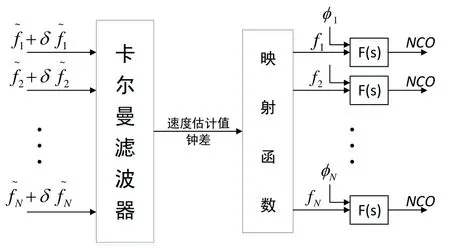
图1 VFAPLL实现结构Fig.1 Implementation structure of VFAPLL
上述结果经过映射函数利用各通道的卫星相对位置得到各个通道的频率估计值,与PLL计算得到的相位估计值同时进入环路滤波器进行融合,滤波得到的最终结果反馈给NCO。
在上述过程中,从接收机速度、钟差估计值到各通道频率估计值的映射过程是借助于VFLL算法中接收机和各卫星之间的投影关系完成的,而在传统FLL辅助PLL算法中并不涉及这一投影关系。
在图1中,载波频率的测量一般可采用四象限频率鉴别器计算,即:

在VFLL环路中,对某颗卫星而言用户接收到的信号实际频率与载波频率、卫星和载体之间的相对速度和接收机钟漂有关,即:

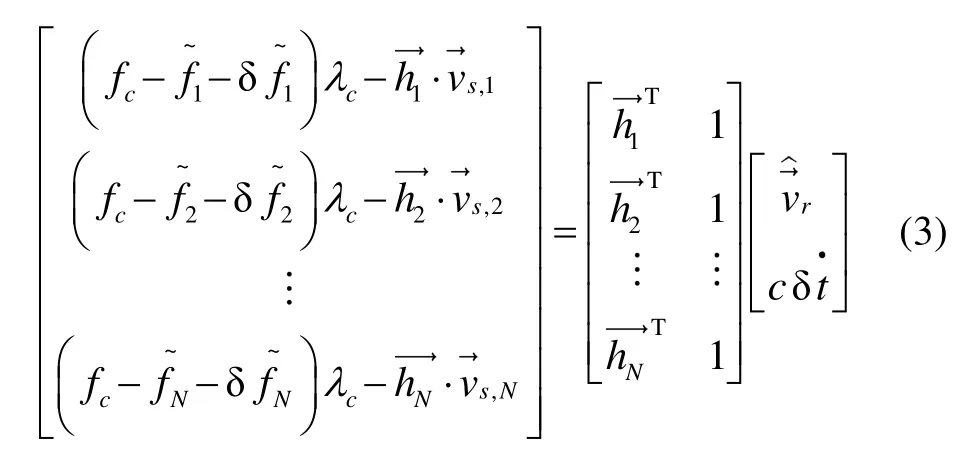
由载体速度估计值和接收机钟漂得到各通道载波频率估计值的映射函数可以写为:

根据文献[3]和[9],由于VFLL在频率测量精度方面优于 FLL,采用VFLL频率测量结果代替 FLL对PLL进行辅助可以使接收机载波相位观测精度得到提高。为了更精确地评价上述指标,本文对具体环路参数的设置和融合方法进行了详细分析。
2 融合方法
2.1 载波频率与相位信息融合方法
根据现代控制理论,当锁相环环路阶数不低于三阶时可以对斜升激励实现稳定跟踪。考虑到现实中卫星导航信号经常存在加速场景,常采用二阶FLL辅助三阶PLL。因此,VFAPLL环路可以采用采用同样的方法进行频差和相差的融合,即利用同等维数的VFLL跟踪环路代替FLL跟踪环路,通过提高频率部分的跟踪性能来达到提高整体环路性能。
图2所示为VFAPLL环路融合算法信号流程图,其中,f为各通道频率估计值,为各通道相位估计值,为融合后的载波相位估计值,T为环路更新时间,、分别为FLL和PLL特征频率。VFLL、PLL分别采用二阶和三阶滤波器,图2中环路滤波参数满足:


图2 VFAPLL融合算法信号流程图Fig.2 Flow chart of VFAPLL fusion algorithm’s signals
在上述结构中,VFLL计算得到各通道频率估计值经过积分后与PLL融合,整个融合函数为一个双输入单输出系统其输出为:

式中,ai和bi为不同阶数的滤波器参数,与式(5)对应;为离散积分器传递函数:


2.2 载波相位平滑码伪距方法
在实际定位中,直接码伪距测量结果精度较低但不存在模糊度,接收机常使用精确度较高的载波相位测量值对码伪距进行一定程度的平滑处理,其中一种常用的整合两种测量值的方法为:

根据文献[10],当相关器间距D,前端带宽和伪码码宽满足时,码环由热噪声导致的码相位测量误差可以表示为:

根据式(10),当信号载噪比为 44 dB⋅Hz,码环带宽 0.2 Hz,相干积分时间 1 ms,前后相关器间距 0.5码片时,计算得到≈0.42 m(GPS C/A 码)。

由式(11),平滑时间常数M越大,码伪距平滑后测量误差越接近于载波相位测量误差。
3 性能测试
由于多通道联合的 VFLL跟踪精度要高于 FLL跟踪精度,因此图2结构中上方的频率精度会有所提高,从而提升了融合滤波的精度。
为了有效对比VFLL辅助PLL和FLL辅助PLL这两种结构在相同条件下的精度性能,这两种结构中的环路滤波器保持一致,参数、、由式(5)给出,环路滤波器带宽和分别为25 Hz和20 Hz。
3.1 静态场景
在静态场景下,可见卫星数量为 10颗时,使用模拟器提供载噪比约为44 dB⋅Hz的GPS L1信号,以软件接收机形式对VFAPLL环路进行性能测试,定位结果更新率为25 Hz。本文对其中的10000个定位结果的测速精度进行了计算,得到的接收机平均测速精度如图3所示,其中 VFAPLL环路平均测速误差为0.0453 m/s,FAPLL环路为0.0775 m/s。实验结果显示,VFAPLL环路能够有效提高锁相环测速精度,相比于FAPLL环路提高约42%。
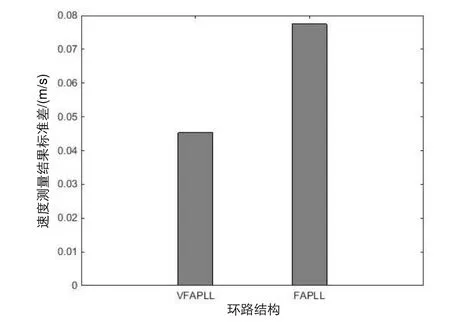
图3 静态VFAPLL和FAPLL速度测量柱状图Fig.3 Histogram of static VFAPLL and FAPLL velocity measurements
图4为VFAPLL环路与FAPLL环路载波相位跟踪精度对比。其中,VFAPLL载波相位测量误差为0.51 mm,传统FAPLL载波相位测量误差为0.61 mm。
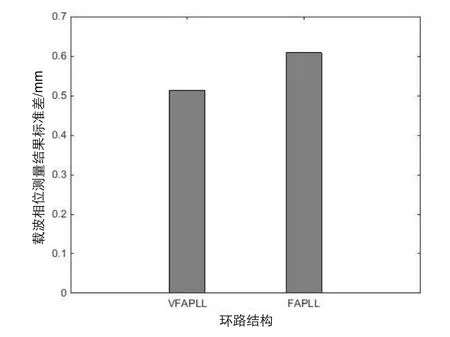
图4 载波相位跟踪精度柱状图Fig.4 Histogram of carrier phase tracking accuracies
由图4可知,与FAPLL相比,VFAPLL能够使环路载波相位测量精度提高约16%。
对于码相位平滑精度而言,根据式(11)可知,利用VFAPLL载波相位对码伪距进行平滑,还能够进一步提高接收机定位精度。
3.2 动态场景
在相同条件下,本文还对具有一定动态的场景进行了仿真,在静态场景中增加了20 m/s的运动速度。对不同环路测速精度进行了统计比对,如图5所示。
图5中VFAPLL环路平均测速误差为0.0388 m/s,FAPLL环路平均测速误差为0.0656 m/s,VFAPLL环路测速精度比FAPLL提高了41%。

图5 低动态VFAPLL和FAPLL速度测量柱状图Fig.5 Histogram of low dynamic VFAPLL and FAPLL velocity measurements
3.3 不同场景定位误差效果图
图6~7为静态和动态场景下,FAPLL和VFAPLL经过载波相位平滑伪距的定位结果。由图6~7可以明显看出,在同等PLL和FLL环路滤波器带宽取值情况下,VFAPLL比FAPLL载波相位辅助码环路的定位结果更加精确。

图6 FAPLL和VFAPLL静态定位误差散点图Fig.6 Scatter diagram of static positioning errors of FAPLL and VFAPLL

图7 FAPLL和VFAPLL动态定位误差散点图Fig.7 Scatter diagram of dynamic positioning errors of FAPLL and VFAPLL
为了说明接收机性能提升的原因,接收机在传统环路定位稳定后的第400个定位时刻(第16 s)切换为矢量环路。图8所示为切换矢量跟踪前后接收机速度解算结果曲线对比。从图8中可见,切换矢量跟踪后接收机速度解算结果波动明显低于标量环路,从而使得接收机定位解算结果更加精确。

图8 切换矢量环路前后速度测量结果对比图Fig.8 Comparison on velocity measurement results before and after switching vector loop
4 结 论
本文研究了矢量频率环辅助锁相环的实现结构,给出了频率估计值和相位估计值的融合方法,并通过软件接收机对上述结构进行了对比验证。
实验结果证明,上述方法在测速精度方面较传统FAPLL环路提高40%左右,在载波相位精度方面较传统FAPLL环路提高16%左右。由于VFLL具有较为精确的载波频率测量精度,使用VFAPLL能够弥补传统矢量跟踪环路在载波相位测量方面的不足,获得准确的载波相位测量结果。同时,利用VFAPLL测得的载波相位平滑码伪距后,能够提高接收机伪距测量精度,获得比传统FAPLL更高的定位精度。
