基于物联网的农业大棚智能管控系统
2018-03-05李兴泽王福平
李兴泽,王福平
(北方民族大学电气信息工程学院,宁夏银川 750021)
近年来,农业大棚种植为提高人们的生活水平带来极大的便利,得到了迅速的推广和应用。种植环境中的温度、湿度、光照度、CO2浓度等环境因子对作物的生产有很大的影响[1]。但温室环境系统是一个非线性、时变、滞后复杂的大系统,难以建立系统的数学模型,采用常规的控制方法难以获得满意的静、动态性能[2]。根据温室棚内环境控制的特点,提出了一种基于物联网的农业大棚智能管控系统的设计。本系统主要分为3个子系统,包括上位机系统、传输系统和下位机系统。上位机系统包括控制中心、环境数据分析、环境数据存储和历史数据查询。传输系统包括GPRS远传模块、ZigBee节点无线传输模块和RS485有线传输模块,主要是传输传感器采集到的环境信息数据[3]。下位机包括环境信息采集模块和动作执行模块,通过多种传感器采集环境信息并实时上传,根据上位机发出的指令,执行相应的动作。3个系统相互联系、相互制约,有共同的目标和核心的控制策略,共同完成农业大棚智能管控任务。这样提高了农业大棚种植的科学化,管理的智能化。
1 系统总体架构
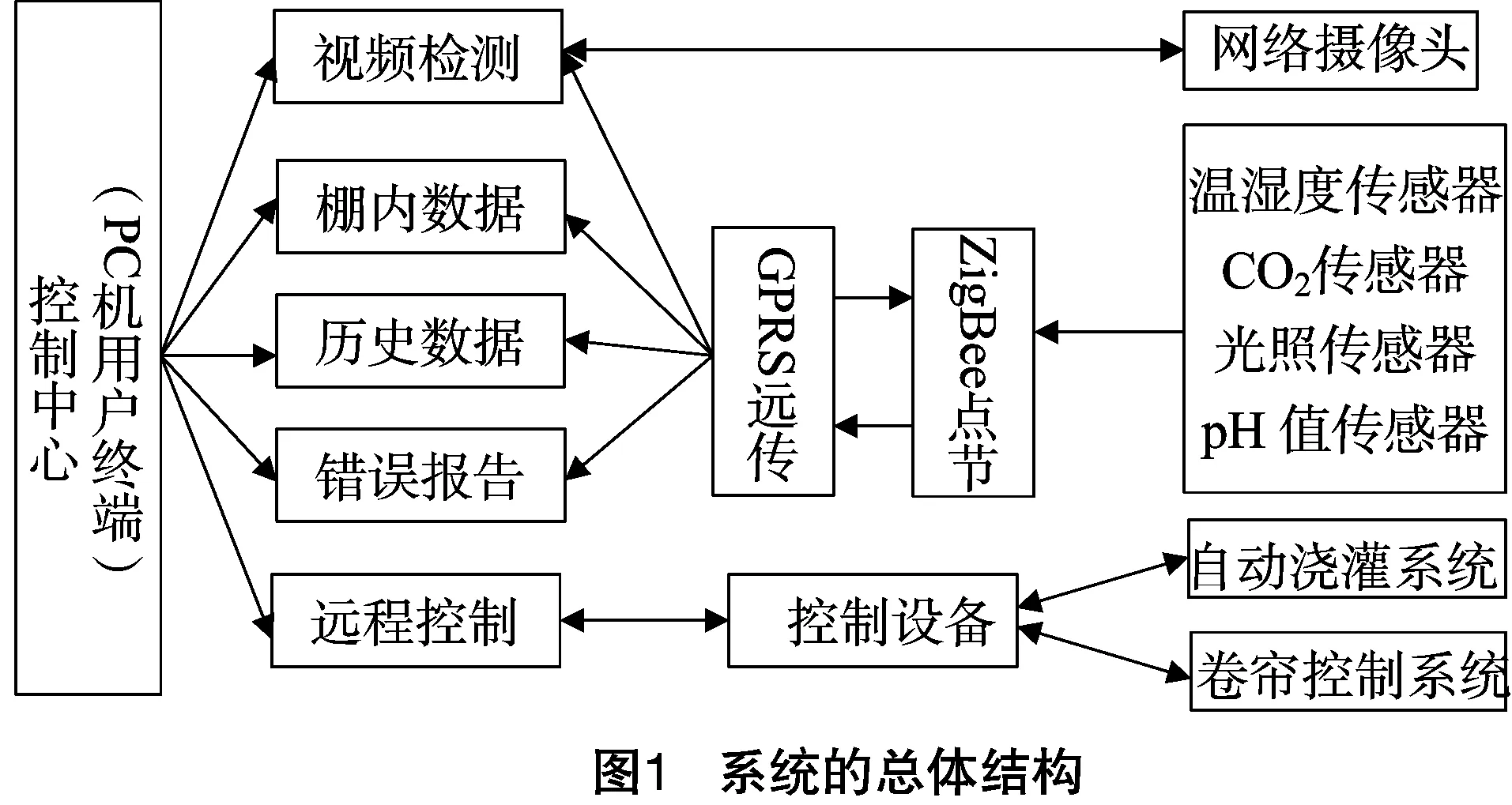
农业大棚智能管控系统主要包括控制中心模块、数据存储模块、网络传输模块、现场数据采集模块和动作执行模块。其中控制中心模块是系统的核心部分,它负责对现场数据的分析、存储和处理,供管理人员实时监测现场环境变化及查询历史数据,并作出相应的控制指令调节现场环境因子使其保持科学性。数据存储模块主要是对现场的视频数据、环境因子数据和一些分析报告进行存储,供管理人员查询和分析。网络传输模块由无线ZigBee和有线RS485结合GPRS组成,其功能是传输现场各子节点测得的数据信息,以供控制中心分析处理。现场数据采集模块主要是采集棚内空气温湿度、光照强度、二氧化碳浓度、土壤温湿度以及视频数据等的采集和控制。动作执行模块由自动浇灌子模块和卷帘控制子模块组成,根据控制中心发出的命令作出相应的调节棚内环境的动作。系统的总体结构见图1。
2 系统的硬件设计
2.1 下位机系统
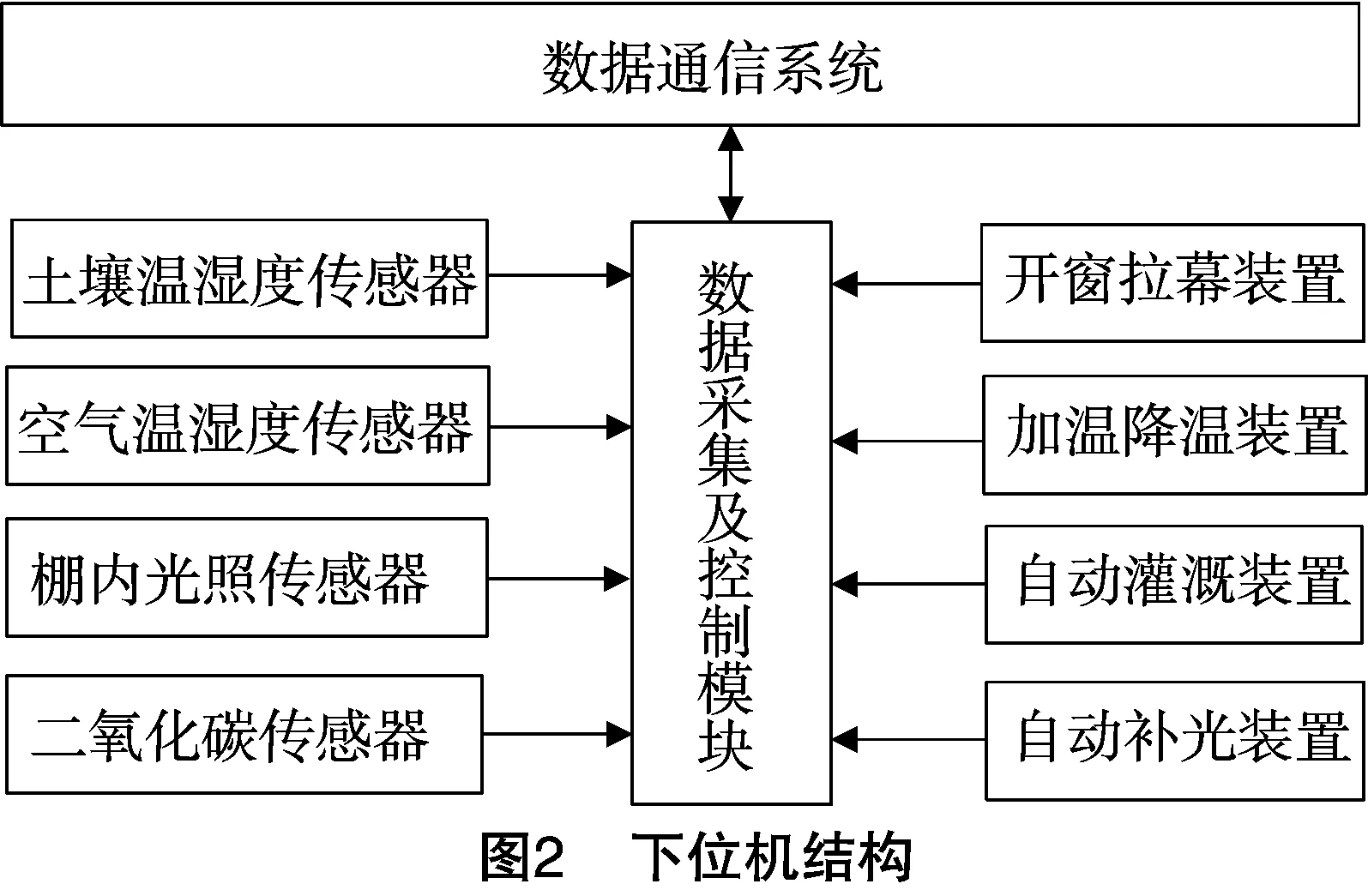
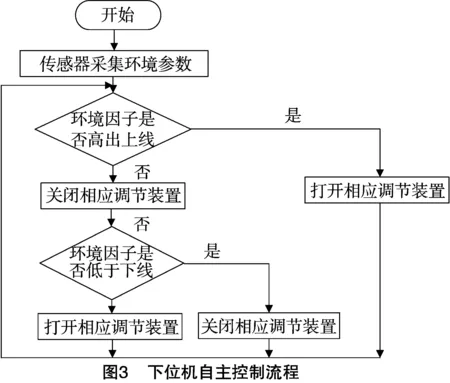
下位机位于控制环境现场,主要由环境信息采集模块和动作执行模块组成,其系统结构见图2。下位机主要实现棚内环境数据实时采集、处理与显示,以及对温室环境的调节,通过RS485、ZigBee以及GPRS将测得的棚内参数传送到上位PC机,并根据上位机的控制决策而产生动作指令,控制执行机构进行调节;具有脱机运行功能,可在上位机关机情况下独立工作,管理人员或专家通过键盘预设环境参数及实时采集的环境参数,自主运行下位机决策程序,实现棚内自动控制[4]。下位机自主控制流程见图3。
2.2 数据采集控制模块
2.2.1 传感器的选择 传感器用来对棚内空气的温湿度、土壤的温湿度、光照强度和二氧化碳浓度等进行数据采集。根据棚内作物生长特点和环境要求,选择精度较高、运行稳定、性价比较高的传感器是十分必要的。本系统采用的是搜博公司SM2801B型土壤水分传感器。SM2801B为搜博自主研发产品,采用工业级精密核心元件使其具有优越的准确性与长期稳定性。该传感器体积设计小巧,方便安装和携带,结构设计合理且密封良好,不锈钢探针保证适用性和广泛性。土壤水分检测传感器可长期埋设于土壤和堤坝中使用,与数据采集器配合使用,可作为水分及温度定点监测或移动测量仪器。SM2801实物及电路如图4所示。采用WTA-100土壤温度传感器,该传感器采用精密铂电阻探头制成,热响应时间少,减小了动态误差,可以准确地测量土壤深层、浅层、表层的温度,并且有着多种信号输出格式。WAH-C10温湿度传感器,采用的是不锈钢外壳,前端的对流口安装了过滤网,可有效地阻挡污物,测量精度高,稳定性好。WLS-TH100光照传感器采用硅光原理,可测量全部太阳和天空向下的辐射,接收的信号经过余弦修正,精度更高;还在传感器的电缆上加载了一个电阻,使得传感器的微安级电流转换成毫伏级电压信号。WSD-C200风速传感器采用坚硬的抗腐蚀抗老化的热塑性塑料,不锈钢外壳并电镀铝,使仪器更加简单和轻质量;并且输出信号为标准格式。图5为土壤温湿度传感器节点的硬件实物。

2.2.2 数据采集控制模块 系统采用DMG-1数据采集控制模块,其核心为16位超低功耗单片机。它采用MODBUS规约,该规约具有开放、文本易得、协议简单等优点,是一种通用的数据采集控制模块。具备RS485接口和RE232接口,在使用RS485接口时具有更高的通信速率和更远的通信距离。
2.3 执行机构架构
本系统执行机构包括开窗系统、拉幕系统、风机-湿帘降温系统、温室加温系统、温室灌溉系统和视频监控系统。这些系统通过上位机对数据采集控制模块下达指令,利用电磁阀控制相应的系统开关,从而实现各系统的自动化、智能化。
3 系统的软件设计
3.1 ZigBee无线网络软件开发
本系统采用TI公司的CC2530无线芯片作为硬件支持和IAR公司的IAR Embedded Workbench集成编译环境作为基础,采用TI Z-Stack软件作为操作系统,在此基础上添加用来监测棚内环境的传感器模块参数读取函数,其中包括土壤温湿度传感器、空气温湿度传感器和二氧化碳浓度传感器等。传感器数据的采集根据各传感器芯片的数据手册,安装协议规定的步骤进行数据的读取。
3.1.1 IAR集成开发环境 IAR Embedded Workbench(简称EW)是一套强大的软件开发工具,用于对汇编、C、C++编写的嵌入式应用程序进行编译和调试。该集成开发环境包含了IAR的C/C++优化编译器、汇编器、链接器、文本编辑器、文件管理器、项目工程管理器和C-SPY调试器[5]。程序通过其内置的针对不同芯片的代码优化器,能够为处理器芯片生成相当可靠和高效的FLASH/PROMable代码。图6为IAR开发环境主界面截图。
3.1.2 ZigBee协议栈应用 本网络节点的软件设计是基于TI公司提供的Z-Stack-CC2530-2.2.2-1.3.0协议栈开发包中包含的项目工程模板创建,在工程模板的应用层框架中添加自己编写的程序和功能函数模块,同时TI公司项目工程模板中还提供了与CC2530芯片相关的底层函数库,如ADC操作函数库、UART操作函数库等,用户可以通过简单的API接口函数调用来实现自己想要的功能。这样就极大地方便了项目开发,有效地缩短了项目开发周期。Z-Stack按照IEEE 802.15.4标准以及ZigBee标准的层次结构进行编程实现,主要包括以下几个模块:APP应用层、HAL硬件抽象层、MAC媒体介质访问层、NWK网络层、OSAL操作系统层和Service服务、Security安全和ZDO等模块。Z-Stack协议栈采用了具有优先级的事件轮询机制,在系统初始化完成后即进入系统休眠模式,如有事件发生,则系统被唤醒,然后按照优先级的顺序依次对触发事件进行处理,待所有事件处理完成后,系统将再次进入休眠模式,开始等待下一事件唤醒。通过这种运行机制,Z-Stack协议栈能有效降低系统功耗。

3.2 数据传输的软件设计
各传感器节点完成数据的采集和转换后,剩下的工作就是把数据发送给协调器节点进行汇总处理。这就涉及到无线网络节点之间的数据通信了,传感器节点以什么样的格式和顺序将数据发送给协调器,协调器如何对收到的数据进行处理,那么就需要设计一个数据通信的协议,也就是确定数据包的帧格式。
3.3 控制算法设计
基于棚内控制方式,我们最终确定用模糊控制算法来设计农业大棚智能管控系统。模糊控制又称模糊逻辑,它是一种以模糊集合、模糊语言变量和模糊逻辑推理为基础的控制技术。最早是由美国的扎德(L.A.Zadeh)在1965年提出了模糊集合论,并在1973年他给出了模糊逻辑控制的定义和相关的定理。1974年,英国的Mamdani首次将由模糊语句组成的模糊控制器控制蒸汽机和锅炉,获得了实验室的成功。图7为模糊控制系统的结构框图。
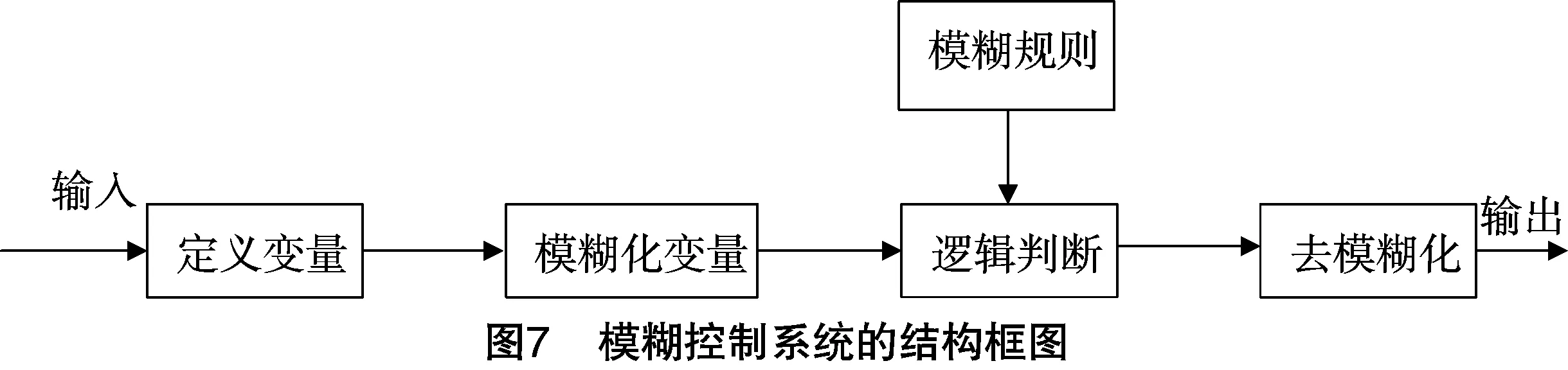
本系统将棚内土壤温湿度作为模糊控制系统的误差变量,通过一系列的模糊控制规则运算,最后设计出一张模糊控制表,将其存放在控制器的内存中,系统通过采集来的数据进过分析及处理,得出模糊控制表中的数据作为输出值来控制系统。
4 总结
日新月异的科学技术给农业大棚带来了更加光明的发展前景,使得农业种植科学利用传感器结合环境信息作出最优控制策略,实现农业的科学种植。本研究介绍了基于物联网的农业大棚智能管控技术,采用分布式控制结构,集中操作管理,相对独立的设计思想,综合运用计算机网络通信和模糊控制技术,实现了单个农业大棚的智能管控。
[1]彭其圣,刘松龄.单片机温室大棚种植参数监控系统[J].中南民族大学学报(自然科学版),2004,23(2):52-53,57.
[2]解永辉.基于PLC的智能温室控制系统的设计[D].济南:山东大学,2008.
[3]续玲玲,杨景常,郝明刚.基于ZigBee网络的社区心电监护系统[J].微型机与应用,2012,32(2):16-17.
[4]周建民,徐冬冬,周其显,等.现代温室监控系统的主要架构方案及发展[J].安徽农业科学,2010,38(3):1440-1441.
[5]栾鑫颖.清华车用集成开发环境的研究与实现[D].长沙:湖南大学,2005.