基于并行粒子群算法的LED植物最优补光系统设计
2018-03-05贺斐斐曹春雨刘景艳任振辉
贺斐斐,曹春雨,刘景艳,任振辉
(1.河北农业大学机电工程学院,河北保定 071001;2.河北省唐山市农业机械质量监督管理站,河北唐山 063000)
随着我国国民生活水平的提高,对作物的需求量也在逐年增加[1]。近年来,温室作物越来越受人们的高度关注。温室内部的光照环境与其内部的作物生长密切相关,光照不足或过剩都会影响作物的生长速度。因而,提供更好的光照条件已成为目前我国提高温室作物产量和质量的重要手段之一。
植物补光技术是目前国内提高经济作物产量所采取的途径之一。当前的补光方式主要有3种:人工手动补光、自动定时补光和自动监控补光[2]。前2种方式的设备结构简单,但人为经验和外界环境变化等因素对系统的工作效果影响较大,系统存在灵活性差和补光效果差异大的缺点;第3种方式采用自动检测外界实时光强、自动控制补光的灯组开关,可在一定程度上实现闭环的自动补光,但控制粗糙,未能实现定量、精确和按需补光,造成补光不足或过剩,从而影响植物生长和光能利用效率[3]。因此,设计基于并行粒子群算法的LED植物最优补光系统以实现实时动态监测,并依据并行粒子群算法确定补光量及补光最优位置就显得尤为重要。
1 硬件部分
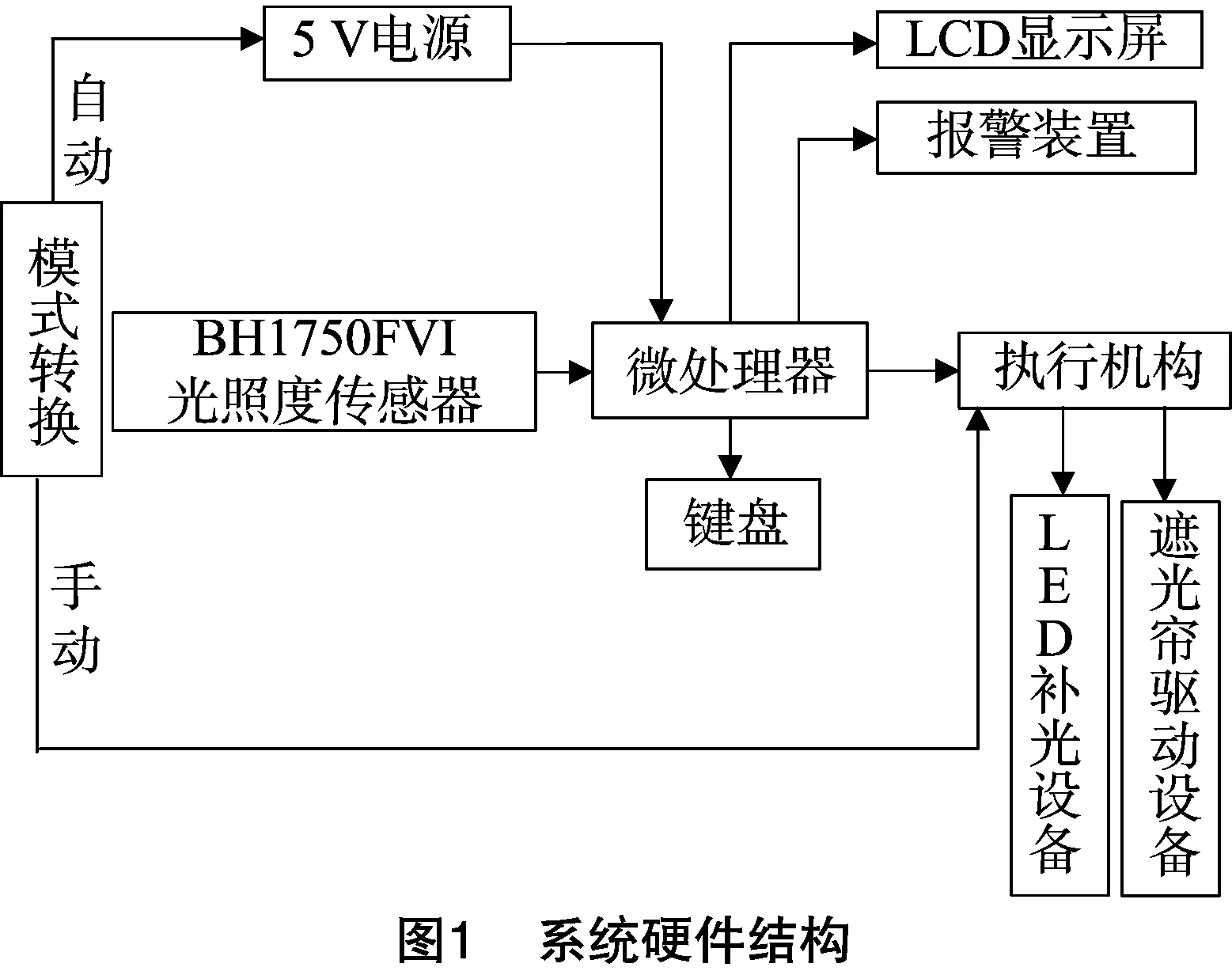
系统功能主要包括数据采集与处理、驱动补光阵列装置和报警装置等3个部分,具体硬件结构如图1所示。
1.1 数据采集与处理模块
数据处理装置以STC89C51单片机为核心,通过BH1750FVI光照度传感器采集数据。BH1750FVI是一种用于两线式串行总线接口的数字型光照度传感器集成电路。这种集成电路可以根据收集的光线强度数据来调整液晶或者键盘背景下的亮度,利用其高分辨率探测较大范围(1~65 535 lx)的光照度变化,并且受红外线的影响较小,其技术参数为电源电压4.5 V,运行温度-40~85 ℃,储存温度40~100 ℃,反向电流7 mA,功率损耗260 mW。
1.2 LED补光模块
系统采用的是一款连续电感电流导通模式的降压恒流源芯片PT4115,可驱动1个或多个串联LED。PT4115的输入电压范围为8~30 V,输出电流可调,最大电流可达1.2 A。根据输入电压和外部器件的不同,PT4115可以驱动高达数十瓦的LED。PT4115有极少的外部元器件,并且内置功率开关,采用高端电流采样设置LED平均电流,并通过DIM(芯片内的引脚)接受模拟调光和较大范围的脉冲宽度调制技术(pulse width modulation,PWM)调光[4]。
1.3 外部液晶显示屏(liqud crystal display,LCD)显示模块
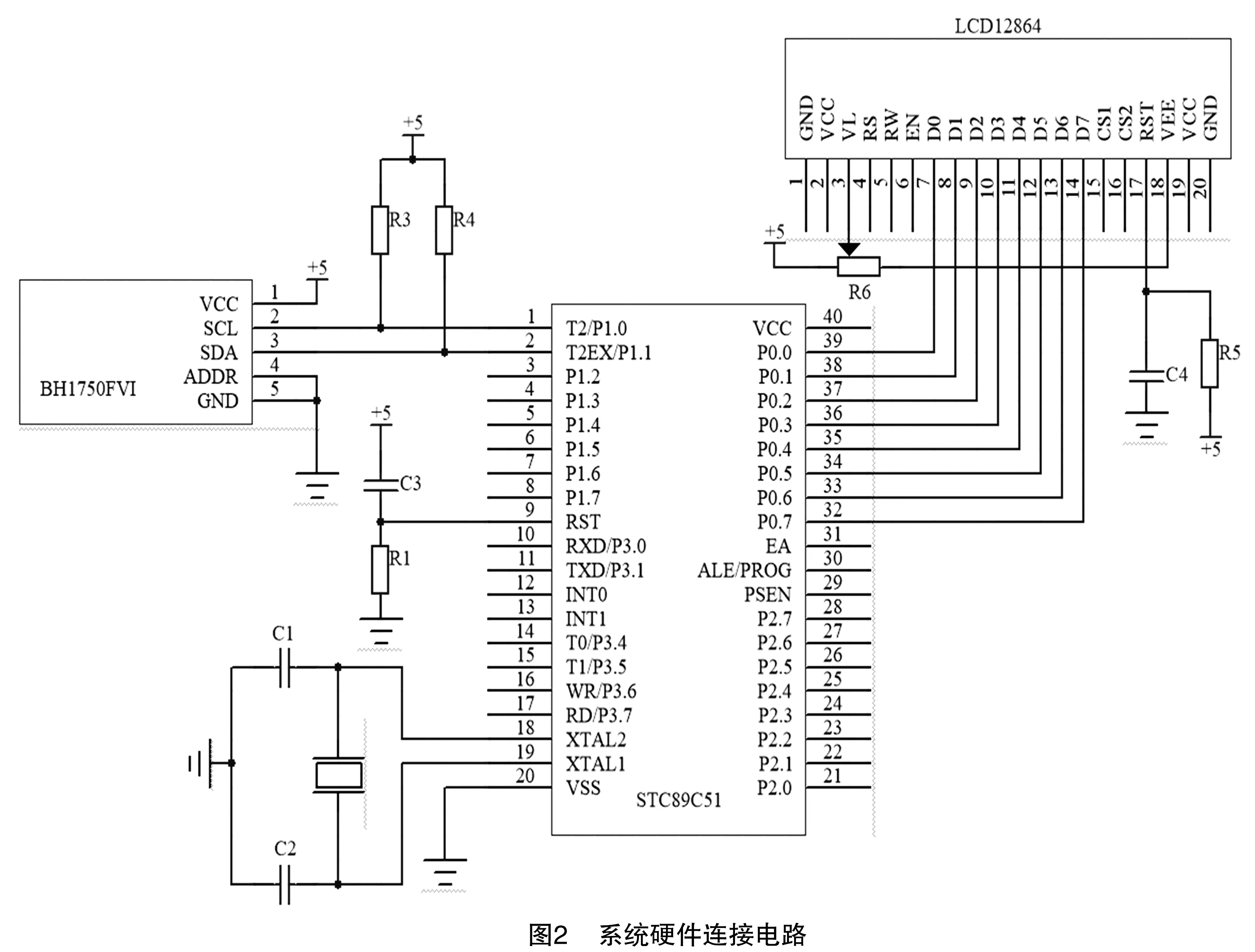
带中文字库的128×64点阵图形液晶显示模块具有4位/8位并行、2线或3线串行多种接口方式,其内部含有国标一级、二级简体中文字库;其显示分辨率为128×64,内置 8 192 个16×16点汉字和128个16×8点ASCⅡ字符集。利用该模块灵活的接口方式和简单、方便的操作指令,可构成全中文人机交互图形界面,可以显示8×4行16×16点阵的汉字,同时可完成图形显示;低电压低功耗是其另一显著特点。与同类型的图形点阵液晶显示模块相比,由该模块构成的液晶显示方案硬件电路结构或显示程序均更简洁,且该模块的价格也略低于相同点阵的图形液晶模块[5]。本研究中的LCD置于温室外部,便于用户直接查看温室内的光照度情况。图2为系统硬件的连接电路。
1.4 报警模块
考虑到可能出现电压不稳或频繁跳闸导致未能精确补光的情况[6],本系统设计报警模块,通过比较连续5次的补光情况,自动判断LED灯组是否正常工作。若判断出现异常时,由单片机输出预警信号,控制蜂鸣器及预警灯,实现报警功能。
2 软件部分
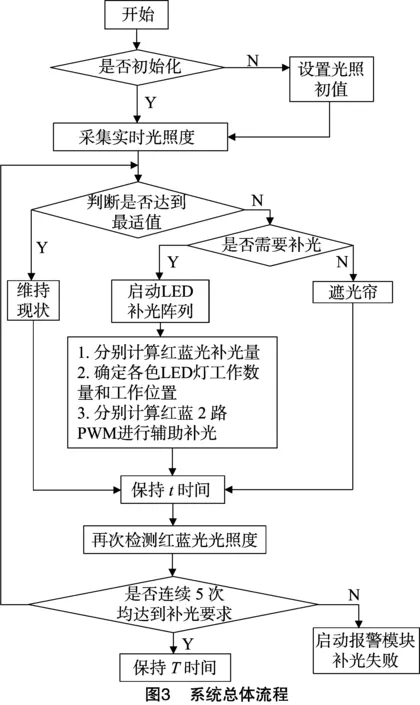
通过以上单片机、传感器模块与LED驱动模块构成小型温室的光照度数据采集与处理系统;建立关于农作物不同时期最适光照度的专家系统,将专家系统的推荐值与实时测量值进行对比,从而确定补光策略;根据并行粒子群算法推算出最优LED补光灯位置及LED最优开灯数量。整个系统的具体流程如图3所示。
2.1 专家系统
作物专家控制系统具有一系列的规则库、知识库和推理机,可实现温室作物生长发育的在线诊断,经推理分析,得到最适合作物生长需要的光照度,并结合温室当前环境参数值进行二次专家推理(模拟人的决策思维过程),得到当前应该达到的最优光照状态。作物专家控制系统以农业知识为获取手段,把农业专家的知识和经验移植到计算机中,并模拟农业专家的推理、决策过程[7-8]。
定义当前温室实时光照度为redValue、blueValue;温室红蓝光照度补光量为redOut、blueOut;当前补光灯阵列补光量的最大值为redMax、blueMax;当前专家推荐值为redRule、blueRlue;每隔时间周期T进行1次循环,具体循环执行过程如下:If(redValue=redRule),即当前温室实时光照度等于专家推荐值,则禁止启动补光灯阵列,同时也禁止启动遮光帘驱动装置;If(redValue>redRule),即当前温室实时光照度大于专家推荐值,则启动遮光帘驱动装置,根据推算公式P=(redValue-redRule)/redValue,驱动遮光帘装置,并满足遮光帘的遮光范围P;If(redValue
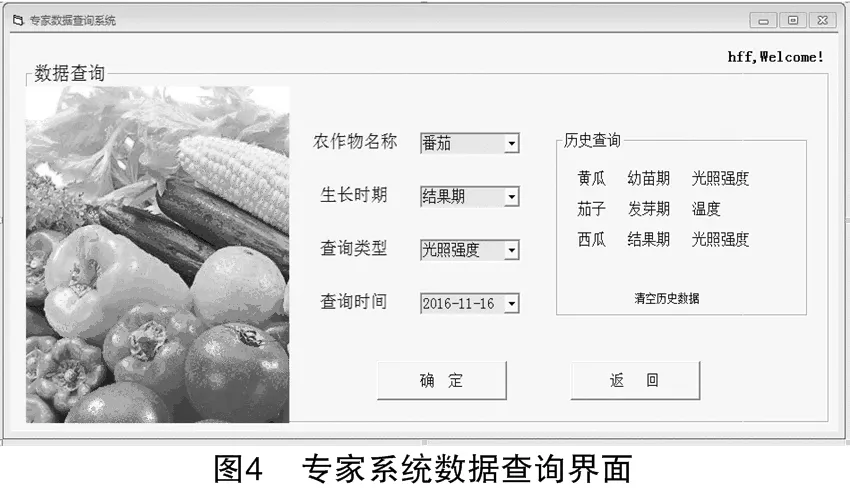
以上程序过程为红光光照度处理过程,蓝光处理过程与之相同。图4为通过专家系统查询不同作物对应不同时期专家推荐值的系统查询界面。
2.2 粒子群算法
在进行优化设计求解过程中,要不断分析实际问题与数学模型之间存在的差异,不断修正优化设计数学模型,才可能建立起正确的数学模型,进而求得最优结果[9]。
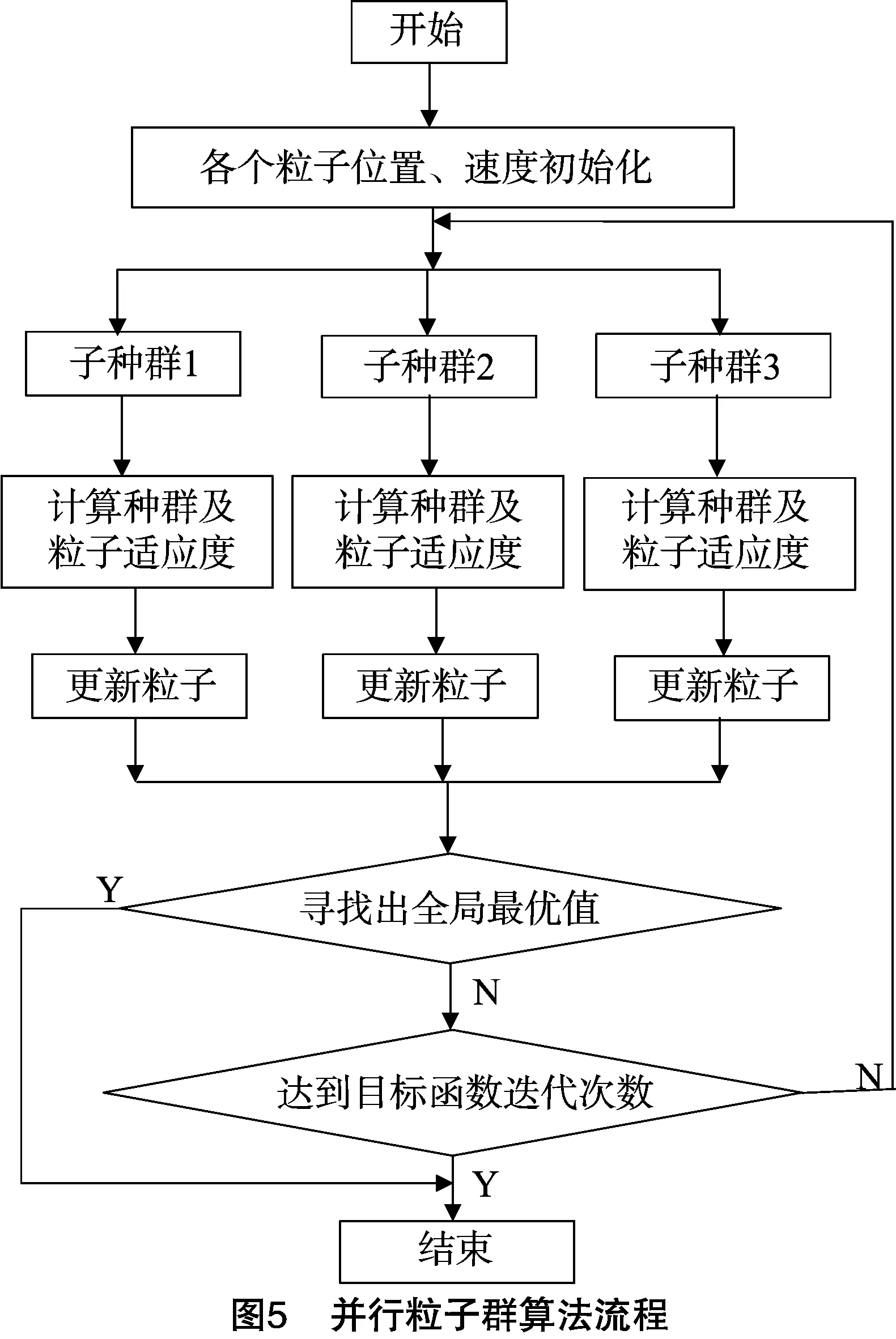
目前的粒子群算法都是根据系统实际需求选择几个适应度较高的粒子种群,然后通过比较种群收敛度以及迭代次数,选择适应度最高的种群,所选择的种群被认为是最优的群体,其中的粒子位置则认为是最优位置。本研究的优化问题为寻找蓝光与红光补光照射的最优位置以及所点亮红光与蓝光LED灯的数量,将本研究的LED阵列看作是所有粒子的集合,并将每一个LED灯所在的位置看作是粒子运动可到达的位置。图5为并行粒子群算法执行的具体流程。
优化问题即为寻找最优的适应度,其公式可表示为
minf(x)=f(x1,x2,…,xn);
xi∈[Redi,Bluei],i=1,2,…,n。
(1)
设第i个粒子表示为Xi=(xi1,xi2,…,xiD),它在LED阵列中经历的最好位置(经过此位置时拥有较好的适应度)即为Pi=(pi1,pi2,…,piD),也称Pbest;在群体所有粒子经历过的最好LED阵列位置的索引号用符号g表示,即Pg,也称其为gbest;微粒i的速度用Vi=(vi1,vi2,…,viD)表示。对每一代,其第d维(1≤d≤D)根据如下方程迭代:
vid(t+1)=vid(t)+c1r1[pid(t)-xid(t)]+c2r2[pgd(t)-xid];
(2)
xid(t+1)=xid(t)+vid(t+1)。
(3)
式中:c1和c2都是正常数,称为加速系数,是2个学习常数;t、t+1为代数;vid为每一粒子在第d维上的速度;i为粒子的编号;d为维数;r1、r2为介于0~1的随机数;pid为每一粒子到目前为止在LED阵列中出现的最优位置;pgd为所有粒子到目前为止在LED阵列中所出现的最优位置;xid为粒子目前所在的位置。
式(1)为目标评价函数,能够快速寻找到目标值,同时本方法须要调整的参数较少,适用于规模相对较小的群体,收敛须要评估函数的次数较少,收敛速度也较快。在本方法中存在一个常量Vmax,用来限制粒子的最大飞行速度。只要粒子速度的绝对值在任何一维上大于Vmax,都将其值设置为Vmax或者-Vmax。由于在目前的研究中,越来越多的研究者发现Vmax对于研究结果有一定的影响,甚至研究结果在一定程度上依赖于该值,因此,对粒子群算法进行改进,改进后的变形更适用于本研究,使得其结果更加优化。
1999年Clerc提出,在粒子群算法(particle swarm optimization,简称PSO)中加入压缩因子K的概念[10],用以确保粒子群最优化算法能够收敛,加入压缩因子K后的公式如下:
vid(t+1)=K{vid(t)+c1r1[pid(t)-xid(t)]+c2r2[pgd(t)-xid(t)]};
(4)
xid(t+1)=xid(t+1)+vid(t+1);
(5)
(6)
式中:ks为引入系数,ks∈[0,1];φ=c1+c2,φ>4。
收缩因子方法会随时间收敛:粒子振荡轨迹的幅度随时间不断减小。当ks=1时,收敛速度非常小并且可在搜索收敛前开展彻底的广度搜索。使用收缩因子的优点在于不再需要使用Vmax,也无需推测影响收敛性和防止急速增长的其他参数值[11]。

2.3 最优光照区域的确定
本研究探讨的是温室LED补光阵列补光效果的最优化问题,系统中的植物补光光源有红光和蓝光等2种,因此确定系统最终补光结果的最优化需要满足两者补光最优化的共同条件,最终的补光区域为2色光照区域的交集[12]。
Dbest=Dredbest∩Dbluebest。
(7)
式中:Dbest为最终的最优补光照区域;Dredbest为满足目标函数的红光最优补光照区域;Dbluebest为满足目标函数的蓝光最优补光光照区域。
3 系统运行结果
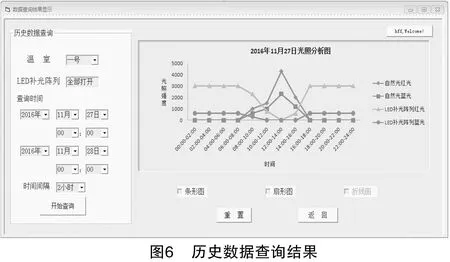
本系统在河北农业大学农学院植物日光温室研究基地进行系统测试,所选用LED灯组内的红、蓝LED灯比例为 5 ∶1,其中设置红光的阈值为3 000 lx,蓝光的阈值为600 lx。图6显示的是2016年11月27日的光照度状况,数据中包含1 d内每2 h的补光状态,其中显示的是温室外界实际的红蓝光照度、温室内部红蓝光补光照度,具体的数据变化通过折线图显示,可以更加直观地掌握温室内光照度的变化情况。
通过该平台用户可以直观地查看数据,对数据进行分析处理,从而更好地掌握温室内的光照状况。本研究提出的方法能够实时了解温室内的光照状况,避免不同阶段补光不足和补光过剩的问题,同时在很大程度上提高资源的利用率。
4 结论
系统以STC89C51单片机、BH1750FVI光照度传感器、LED驱动装置以及专家系统为基础,利用并行粒子群算法进行数量以及位置的优化,开发温室LED补光最优化系统,可实现数据传输、分析以及处理的功能,并可通过外界LCD显示温室内的情况,从而得到以下结论:(1)系统以STC89C51单片机为核心,通过单片机与光照度传感器之间的连接,可实现数据的采集;(2)设计开发专家控制系统,将实时测量值与专家推荐值进行比较,可较好地实现植物的精确补光;(3)采用并行粒子群算法对补光强度以及补光位置进行优化,可实现植物补光强度和补光位置的优化。
[1]陈 晓.温室智能控制及专家系统设计[D].太原:太原理工大学,2016.
[2]张海辉,胡 瑾,杨 青,等.设施农业可调光质精确补光系统[J].农业机械学报,2012,43(3):181-186.
[3]史宏志,韩锦峰,远 彤,等.红光和蓝光对烟叶生长、碳氮代谢和品质的影响[J].作物学报,1999,25(2):215-220.
[4]吴玉娟,陈志明,刘永华,等.基于ARM技术微型封闭式植物种植智能控制系统设计与实现研究[J].安徽农业科学,2013,41(1):393-394.
[5]崔世钢,王 辉,梁 帆.基于LED照明的小型温室环境控制系统[J].电子测量技术,2014,37(3):93-96.
[6]张海辉,杨 青,胡 瑾,等.可控LED亮度的植物自适应精准补光系统[J].农业工程学报,2011,27(9):153-158.
[7]崔奇明,李友红,崔舒婷.专家系统工具ESTA及其应用[M].沈阳:东北大学出版社,2014.
[8]赵玉清.基于专家系统的温室智能化控制研究[D].昆明:昆明理工大学,2007.
[9]黄席樾,向长城,殷礼胜.现代智能算法理论及应用(第二册)[M].北京:科学出版社,2009.
[10]Clerc M.The swarm and the queen:towards a deterministic and adaptive particle swarm optimization[C]//Proceedings of the IEEE Congress on Evolutionary Computation.New York:IEEE,1999:1951-1957.
[11]Eberhart R C,Shi Y.Comparing inertia weitghts and constriction factors in particle swarm optimization[C]//Proceedings of the IEEE Congress on Evolutionary Computation.New York:IEEE,2000:84-88.
[12]朱 舟,童向亚,郑书河.基于粒子群算法的LED植物光源最优光照区域确定[J].河北农业大学学报,2016,39(4):129-134.