非航海用DDM向航海应用转换的方法
2018-02-28曹鸿博张立华黄文骞贾帅东刘现鹏
曹鸿博,张立华,黄文骞,贾帅东,刘现鹏
(1. 海军大连舰艇学院海洋测绘系,辽宁 大连 116018; 2. 海军大连舰艇学院海洋 测绘工程军队重点实验室,辽宁 大连 116018; 3. 海军出版社,天津 300450)
数字水深模型(digital depth model,DDM)是对海底表面高低起伏形态的数字化模型表达,直接决定了海底地形地貌表达的准确性和舰船航行的安全性[1-2]。从应用服务的显著性差异出发,DDM可分为航海用DDM和非航海用DDM[3]。航海用DDM主要是对离散的原始水深数据构建不规则三角网结构的数据模型,以保证舰船航行安全[4-5];非航海用DDM则通常采用处理后的内插值作为模型点水深值,并且构建规则网格结构的数据模型,以表达真实的海底地形地貌。非航海用DDM一般采用当前主流的网格模型数据结构[6],在海洋工程、海上考古、海洋地质调查与资源开发等领域存在着广泛的应用[7-8]。
目前,航海用DDM和非航海用DDM在水深选取和模型构建上有着不同的方法,导致两者之间不能真正实现水深数据的共享[9]。当前,由于海上水深测量具有高投入、长周期等特点,在不同部门、行业之间进行水深数据的共享、互用是一个必然的趋势[10]。长期以来,为非航海领域服务的水深数据一般采用的是内插水深,并未顾及在航海应用中所选取的水深需要遵守“取浅舍深”的水深综合原则[2];另外,非航海用DDM所采用的网格模型数据结构本身具有削峰填谷的性质,而且随着网格尺度的增大,削峰填谷程度越甚[11],从而导致所构建的非航海用DDM表面存在水深漏浅的现象,给舰船的安全航行带来重大隐患。上述都是基于人工经验的方法定性地描述了非航海用DDM在应用于舰船航海时所存在的安全性问题,但如何对这种不安全性进行定量描述,以使非航海用DDM能够满足舰船航海上的安全需求则有待研究。2015年,张立华等引入了水深不确定度的概念,首次提出采用深度保证率指标定量评估DDM在航海上的这种安全性,解决了以往单靠人工经验法在评估航海安全性上存在无定量指标的不足,并且提出了DDM满足舰船安全航行时深度保证率指标需要达到97.5%的要求[4]。2015年,贾帅东试验验证了非航海用DDM的模型点水深值采用距离反比加权时,多格网尺度下的非航海用DDM的深度保证率一般为50%左右,远低于满足舰船安全航行的深度保证率指标要求[12],从而间接印证了非航海用DDM不能直接应用于航海上的问题。因此,分析非航海用DDM的航海安全性指标深度保证率偏低的原因,研究非航海用DDM向航海应用时的转换方法具有现实意义。
1 不确定度拟合面的构建和模型转换方法
1.1 基本思想
非航海用DDM向航海应用转换方法的基本思想如下:
(1) 基于国际标准化组织制定的《测量不确定度指南》(guide of the expression of uncertainty in measurement,GUM)中推荐的不确定度合成方法,计算原始水深不确定度对非航海用DDM建模点的传递不确定度,采用测试点检验法依次计算非航海用DDM每个网格的地形描述不确定度,进而合成非航海用DDM建模点的综合不确定度。
(2) 基于模型网格双线性法对非航海用DDM建模点的综合不确定度构建每个网格的不确定度拟合面,实现非航海用DDM向航海应用时的转换。
1.2 非航海用DDM不确定度的计算
1.2.1 非航海用DDM建模点传递不确定度的计算
非航海用DDM采用基于距离反比加权平均法的网格建模方法,计算方法为
(1)
式中,zq为点q的内插水深值;zi为第i个点的水深值;pi为第i个点的权函数;n为参考点的个数。本文选用距离平方的倒数作为权函数,如下
(2)
将式(1)中的内插点水深值看作函数值,将参考点权函数pi中的距离di和水深值zi看作自变量。根据GUM法[13],得到参考点i的距离di和水深值zi引起内插点q的垂直标准不确定度分量为
(3)
根据GUM法,对式(3)进行整理进而得内插点q的垂直标准不确定度uDepz为
(4)
式中,uPosi、uDepi分别为参考点i的水平标准不确定度和垂直标准不确定度,进而得内插点q的垂直不确定度为
(5)
由于内插点q的平面位置已经给定,故其水平标准不确定度为0[14]。
1.2.2 非航海用DDM每个网格地形描述不确定度的计算

(6)
因此,非航海用DDM建模点的综合不确定度为
(7)
1.3 不确定度拟合面的构建和模型转化方法
2012年,国际海道测量组织在公布的《S-102水深表面产品规范》中,定义了航海表面的概念,并且指出航海表面是可以保障舰船航行安全的海洋表面,主要包括实测水深值和不确定度估值两个方面[15]。因此,本文采用上述方法组织航海用DDM水深数据。
不确定度拟合面的构建方法如下:首先利用式(5)、式(6)分别计算非航海用DDM模型点的垂直不确定度和每个网格的地形描述不确定度,其中模型点的垂直不确定度信息标注为网格点的一个属性值,每个网格的地形描述不确定度信息标注为该网格的一个属性值;其次按照GUM法对每个模型网格点的垂直不确定度和相应网格的地形描述不确定度进行合成,从而得到每个模型网格点的总不确定度;最后,对于每个模型网格中的4个点的总不确定度信息,基于网格双向性法构建非航海用DDM中每个网格不确定度拟合面。
非航海用DDM向航海应用时的转换方法为:首先,基于网格双线性法内插非航海用DDM中任一点的水深值z′;其次利用不确定度拟合面法计算出该点的垂直不确定度值uz;最后将z′-uz作为该点调控后的水深值应用于航海上,以实现非航海用DDM向航海应用的转换。
2 试验分析
2.1 试验区域
选取3块不同海底地形复杂程度海区的实测高密度多波束水深数据进行相关试验,图1为试验海区的三维示意图,区域大小均为1.0 km×1.0 km。其中,图1(a) 是海底地形复杂程度为平坦的试验海区,原始水深数据为14 569个,模型检查点数为1127个,水深变化范围为40.1~68.0 m,平均水深为49.7 m;图1(b)是海底地形复杂程度为混合的试验海区,原始水深数据为16 133个,模型检查点数为1241个,水深变化范围为59.3~90.2 m,平均水深为73.3 m;图1(c)是海底地形复杂程度为复杂的试验海区,原始水深数据为13 564个,模型检查点数为1044个,水深变化范围为68.4~98.9 m,平均水深为82.2 m。
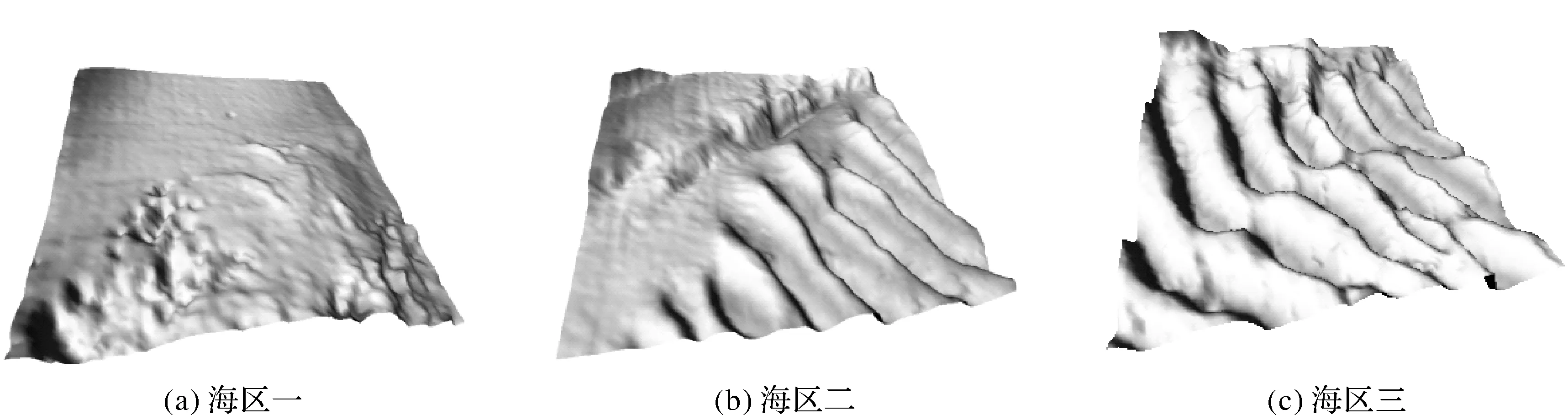
图1 试验海区三维示意图
2.2 顾及不确定度拟合面的非航海用DDM深度保证率比对分析
为了验证所提方法,以上述3块试验海区为例进行试验,分别构建不同网格尺度下的非航海用DDM,并且计算非航海用DDM转换前后的深度保证率,试验结果见表1。
从表1可以看出,在相同网格尺度条件下,与未顾及不确定度拟合面法的非航海用DDM相比,顾及不确定度拟合面的非航海用DDM的深度保证率有了明显的提高。这是由于顾及不确定度拟合面的非航海用DDM充分考虑了原始水深数据不确定度信息对模型点垂直不确定度的传递影响和模型网格的地形描述不确定度对模型不确定度的影响。
从表1中还可以发现,在相同网格尺度条件下,随着海底地形复杂程度的不断增大,与未顾及不确定度拟合面的非航海用DDM相比,顾及不确定度拟合面的非航海用DDM的深度保证率提高的数值也不断增加,因为随着地形复杂程度的不断增大,模型网格区域的地形描述不确定度值也随着不断增大,进而引起顾及不确定度拟合面的非航海用DDM在表达实际水深值上的变浅量增加,从而引起模型深度保证率增大,而未顾及不确定度拟合面的非航海用DDM深度保证率则未有明显变化,因此,非航海用DDM深度保证率提高的数值也随着不断增大。从表1中还可以得出,对于复杂海底地形,在大网格尺度下,顾及不确定度拟合面的非航海用DDM能够满足舰船航海安全需求。
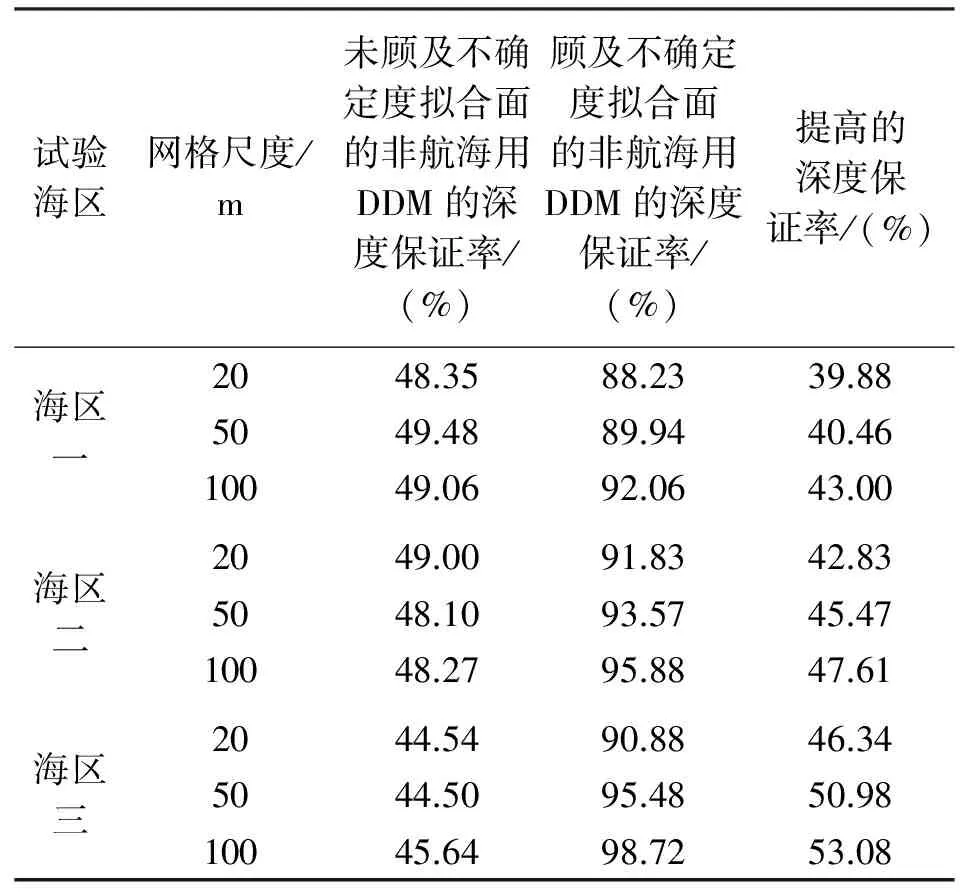
表1 非航海用DDM深度保证率统计结果
2.3 航海用DDM与非航海用DDM转换后的模型深度保证率比对分析
为了进一步验证所提方法的有效性,对试验海区的多波束原始水深数据分别构建航海用DDM和非航海用DDM,并计算DDM的深度保证率。试验结果见表2。

表2 DDM深度保证率统计结果
从表2可以看出,与航海用DDM相比,顾及不确定度拟合面的非航海用DDM深度保证率有了明显提高,即顾及不确定度拟合面的非航海用DDM在应用于舰船航海时,在航海安全性上大于目前所用的航海用DDM。这是由于顾及不确定度拟合面的非航海用DDM考虑了模型点上水深不确定度和地形描述不确定度对模型深度保证率的影响所引起的。
从表2还可以看出,在同一试验海区中,随着建模点数的减少,与航海用DDM相比,顾及不确定度拟合面的非航海用DDM所提高的深度保证率数值在不断减少。这是由于随着建模点数的减少,考虑到航海用DDM采用的是取浅舍深后水深数据,所构建的模型表面将会在水深以浅的方向上出现系统性的偏差,从而提高了航海用DDM的深度保证率;而随着建模点数的减少,顾及不确定度拟合面的非航海用DDM则主要是受到模型网格尺度变化引起的地形描述不确定度的影响,虽然地形描述不确定度会不断增大,引起顾及不确定度拟合面的非航海用DDM所表达的模型表面变浅,但这种变浅的增量相对小于航海用DDM的变浅增量,因此,将会导致非航海用DDM深度保证率提高的数值在不断减小。
3 结 论
本文提出了一种基于不确定度拟合面的非航海用DDM向航海应用转换时的方法,经试验验证分析,得出如下结论:
(1) 与非航海用DDM相比,所提方法考虑了模型点的不确定度和模型网格的地形描述不确定度的影响,能够明显地提高转化后非航海用DDM的深度保证率;在同网格尺度条件下,随着海底地形复杂程度的不断增大,顾及不确定度拟合面的非航海用DDM所提高的深度保证率数值也随之不断增大。
(2) 与航海用DDM相比,在相同建模点条件下,顾及不确定度拟合面的非航海用DDM深度保证率也有明显提高;在同一试验海区中,随着建模点数的减少,顾及不确定度拟合面的非航海用DDM所提高的深度保证率数值随之不断减小。
本文仅从不确定度拟合面分析验证了非航海用DDM向航海应用时的转换方法,而针对海底地形复杂程度对模型水深不确定度信息的影响变化规律,进而影响非航海用DDM的深度保证率,还有待于进一步研究。
[1] International Hydrographic Organization. Bathymetric Surface Product Specification (Edition 1.0.0) [S]. Monaco: [s.n.], 2012.
[2] 陈长波, 刘小丁, 朱紫阳,等. 单波束测深数据的插值精度分析[J]. 测绘通报,2017(3):67-70.
[3] ANDY H, KAREN C. Harmonizing Survey Deliverables-Emerging Standards and Smart Data Exchange[C] ∥Hydro 14 22nd Conference of the International Federation of Hydrographic Societies. Aberdeen: [s.n.], 2014.
[4] 张立华, 贾帅东, 王涛,等. 深度保证率和表达度指标的定义及评估方法[J]. 武汉大学学报(信息科学版),2015, 40(5):695-700.
[5] 周庆冲. 基于航行需求的海图制图综合[J]. 测绘通报,2011(9):56-58.
[6] 王春, 刘学军, 汤国安,等. 格网DEM地形模拟的形态保真度研究[J]. 武汉大学学报(信息科学版),2009,34(2):146-149.
[7] 董箭, 彭认灿, 张立华,等. 顾及“保真性”原则的双向滚动球变换DDM多尺度表达算法[J]. 测绘学报,2017, 46(6):789-801.
[8] 张立华, 贾帅东, 吴超,等. 顾及不确定度的数字水深模型内插方法[J]. 测绘学报,2011,40(3):359-365.
[9] 曹鸿博, 张立华, 王新成,等. 航海与非航海DDM之间的差异性分析[C] ∥全国第二十八届海洋测绘综合性学术研讨会论文集. 西安:中国测绘地理信息学会海洋测绘专业委员会,2016:202-205.
[10] SMITH S. The Navigation Surface: a Multipurpose Bathy-metric Database[D]. New Hampshire: University of New Hampshire, 2003.
[11] 胡海, 游涟, 胡鹏,等.数字高程模型内插方法的分析和选择[J]. 武汉大学学报(信息科学版),2011,36(1):82-85.
[12] 贾帅东. 航海DDM的构建理论与方法[D]. 大连: 海军大连舰艇学院, 2015.
[13] BIPM, IEC, IFCC, et al. Guide of the Expression of Uncertainty in Measurement [S]. Switzerland: ISO, 1995.
[14] CALDER B. Automatic Statistical Processing of Multibeam Echosounder Data[J]. International Hydrographic review,2003,4(1):53-68.
[15] 张岳, 张大萍. 水深表面产品规范 S-102分析[J]. 海洋测绘,2014,34(1):80-83.