用于RFOG的光学锁相环仿真研究
2018-02-28王祖谦傅长松
王祖谦, 周 震, 王 潇, 姜 辉, 傅长松
(1.北京航空航天大学微纳测控与低维物理教育部重点实验室,北京100191;2.上海惯性工程技术研究中心,上海200233;3.上海航天控制技术研究所,上海201109)
0 引言
谐振式光纤陀螺是一种基于Sagnac效应的角速度测量设备,它的原理表明了可以通过使用较短的光纤实现测量,在实现高精度的同时有效减小光纤长度,具有无源结构、精度高、体积小、成本低等优点,是国内外惯性器件发展的重要方向之一[1]。
激光器作为谐振式光纤陀螺的重要组成部分,对测量结果有着极大的影响[2]。谐振式光纤陀螺要求激光器具有波长可调谐、窄线宽的特点。目前,制约谐振式光纤陀螺向导航级别精度发展的主要问题是需要完全消除由于背反的光信号干涉效应引起的陀螺误差,这个误差是由信号光与反射光在不同频率条件下拍频所造成的。
传统的谐振式光纤陀螺解决方案是通过使用LiNbO3相位调制器或声光移频器来对激光器频率漂移产生的背反噪声进行抑制[3-4],随着顺时针(CW)方向与逆时针(CCW)方向的光频率被锁定在CW和CCW方向的谐振腔频率上,它们的频率差f1-f2很小,因此噪声很难被完全滤除。而基于光学锁相环的谐振式光纤陀螺是使用两个独立的半导体激光器,两个激光器输出光频率间隔一个或几个谐振腔FSR的频率间隔。如果一路背散光进入另一方向的光路中,这个由背散光干涉造成的误差信号的频率为f1-f2,大于旋转时所需的测量带宽。因此,由干涉引起的误差可以轻松地将其从陀螺信号中滤除[5],从原理上抑制背反噪声,提升陀螺的测量精度。
为全面实现基于光学锁相环的谐振式光纤陀螺方案做准备,先采用Simulink来对光学锁相环进行仿真,为后面的光学锁相环搭建实验中的PID等控制参数提供了重要的参考经验。
1 光学锁相环结构
与电锁相环系统相似,光学锁相环是一种通过信号相位反馈控制激光器输出信号频率的系统,使从激光器跟踪主激光器的频率与主激光器频率的变化保持一致,从而实现恒定的输出信号频率差。如表1所示,锁相环系统有3个重要部分:主振荡器、压控振荡器与相位探测器。其中,电学锁相环是由振荡器、压控振荡器电学混频器3部分组成,而光学锁相环也有这3个重要组成部分:主激光器、从激光器和180°光混频器。
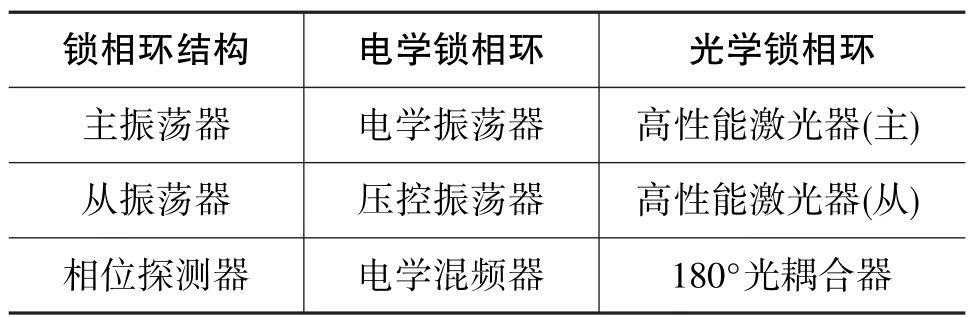
表1 电学锁相环与光学锁相环Table 1 Comparison of PLL and OPLL
光学锁相环的总体结构示意图如图1所示。主激光器与从激光器输出光束通过180°光耦合器后得到拍频光信号,该拍频光信号包含了两激光器的相位差等信息,而后与外部参考信号进行二次混频,再将其输出反馈至从激光器,通过电流调制的方式,达到控制从激光器输出相位的功能。
2 光锁相环数学模型
光锁相环的基本原理是:
由主激光器与从激光器发出的信号光和本征光经过180°耦合器后,可输出两路光束[6]:
两激光器光束经过光电探测器后得到:
其中,r为PIN管的光电响应度,RL为电阻。
如图2所示,两路电压经过光电探测器之后,得到差频电信号U3,U3代表包含两激光器相位差值信息的拍频信号。拍频信号再与参考信号进行二次混频,由于SCL激光器采用电流调制的方式控制输出频率,在这里采用电流的表达形式。其中,两信号频率差即拍频信号频率为ωBEAT=ωm-ωs。
不失一般性地认为,可以考虑只有+号时的电流情况。这时的锁相环路拥有两种锁定状态即锁定在±ωREF频率处,通过设计合适的环路滤波器可以确定环路的锁定状态,在这里假设其锁定于+ωREF频率处。由于该信号通过环路滤波器后反馈至从激光器,从激光器的频移量与反馈电流的大小相对应因此改变的频率值为:
其中,Ks为LPF的增益值,Kamp为鉴相器的输出增益值。式(7)中,负号代表着从激光器的频率随着电流值的增大而减小。在这里将环路中所有的增益系数统一起来用Kdc表示:
当环路锁定时,从激光器的频移量可以通过以下公式来计算:
通过反馈电流,从激光器的输出频率逐渐改变直至跟踪上主激光器的频率,系统进入锁定状态,这种过程称之为自捕获过程。在这里将相位探测器的输出电压值简化为vd=Kdsinθe,此时从激光器的输出频率为ω0+δωs,即ω0+Kdvd。从激光器的相位为:
而相位误差为:
微分后可推导出:
如果 dθe/dt=0, 那么 sinθe(t)=Δω/K, 所以当且仅当|Δω|<K时,环路才可锁定。将式(13)两侧同除以K,可以得到关于PLL的一阶相平面图[7]。
如图3所示,当|Δω|<K时,那么在每个2π区间内均存在两个平衡点,在每个这样的点上dθe/dt=0趋近于0,则平衡点上主激光器信号与从激光器信号之间的频率差为0。由于相邻的两个平衡点的斜率是相反的,因此假设斜率为负的平衡点上的工作点稍有偏离向左侧,那么其斜率为正,因此θe的值必然增加,移回这个平衡点;假设斜率为负的平衡点上的工作点稍有频率向右侧,那么斜率为负,因此θe的值必然减少,则会被驱离原来的平衡点,移向附近最近的平衡点。因此负斜率的平衡点是稳定的,而正斜率的平衡点是不稳定的,图3中的箭头方向就表示了相位变化的方向。
3 仿真结果
根据锁相环的基本原理与实际拟采用的实验设备参数,采用Simulink搭建光学锁相环系统,系统的整体框架如图4所示。其中,Master_Laser与Slave_Laser为激光器模块,180°Hybird模块为光耦合器与光电探测器模块,Fre_syn为频率综合模块,PID为PID控制模块。各个模块的详细参数如表2所示。

表2 光学锁相环仿真参数Table 2 Parameter setting of OPLL simulation
图5所示的是最终反馈到从激光器的控制信号,从上面的仿真结果可知,通过该锁相环模型,系统可以锁定住频偏值。由于两激光器的初始频率偏移设置是+400MHz,而参考信号的频率是100MHz,即最后要求的频率偏移量为100MHz,调谐系数K0为60MHz/mA,所以最终锁相环的反馈电流值收敛至-5mA,即满足400-60×5=100MHz,验证了仿真结果的正确性。
处于稳态的锁相环工作在相位跟踪状态,实时跟踪锁相环路中的主激光器相位变化,最终得到的仿真结果如图6所示。频率差值一直稳定在100MHz附近,最大频率波动范围为±2.162kHz,其频率稳定度为0.043%,在锁相环的跟踪范围之内,不会产生脱锁的情况。
4 结论
本文进行了基于谐振式光纤陀螺的光学锁相环技术仿真,该锁相环结构合理,可利用现有设备参数进行仿真。本文在理论分析的基础上,表述了光学锁相环的工作原理与锁定过程,为计算实验中PID等控制参数提供了重要的理论基础。通过建模仿真,最后得到了与理论分析一致的实验结果:两台RIO激光器的频率差值可以被锁至100MHz,稳定度为0.043%,保证不出现脱锁情况的发生,为后续搭建基于光学锁相环系统的谐振式光纤陀螺提供了有力的基础与保障。
[1]郅银周.谐振式光纤陀螺闭环检测技术研究[D].北京航空航天大学大学,2015.ZHI Yin-zhou. Close-loop dection technology for resonator fiber optical gyro [D].Beijing University of Aeronautics and Astronautics,2015.
[2]马迎建,宋彭,武学英.外腔半导体激光器在谐振式光学陀螺中的应用研究[J].传感器与微系统,2011,30(4): 51-53+56.MA Ying-jian, SONG Peng, WU Xue-ying.Application research of external cavity semiconductor laser in resonant optical gyroscope [J].Transducer and Microsystem Technologies, 2011, 30(4): 51-53+56.
[3]Sanders G A, Rouse G F, Strandjord L K, et al.Resonator fiber-optic gyro using LiNbO3integrated optics at 1.5-μm wavelength [C].OE/Fiber LASE'88, International Society for Optics and Photonics, 1989: 202-210.
[4]Takiguchi K, Hotate K.Partially digital-feedback scheme and evaluation of optical Kerr-effect induced bias in optical passive ring-resonator gyro [J].IEEE Photonics Technology Letters, 1991, 3(7): 679-681.
[5]Wu J, Smiciklas M, Strandjord L K, et al.Resonator fiber optic gyro with high backscatter-error suppression using two independent phase-locked lasers [C].International Conference on Optical Fiber Sensors (OFS24), International Society for Optics and Photonics, 2015: 96341O-9634 1O-4.
[6]丁之.光锁相环环路设计与仿真研究[D].电子科技大学,2011.DING Zhi.Research on OPLL design and simulation [D].University of Electronic Science and Technology of China,2011.
[7]Gardner F M.锁相环技术[M].北京: 人民邮电出版社,2007.GardnerF M. Phaselock technology [M].Beijing:People's Posts and Telecommunications Press,2007.
