基于低开关频率的特殊脉宽调制技术研究
2018-02-25徐鲁辉
■ 徐鲁辉
0 引言
在轨道交通牵引控制系统中,牵引变流器所承受直流侧供电母线电压较高,其输出功率也较大。牵引变流器通常会选择电压等级较高的功率模块,如3 300 V模块或6 400 V模块。高压功率模块的开关损耗和散热制约了其开关频率的应用,其开关频率较低(一般低于1 kHz)。为满足功率模块的低开关频率限制和轨道车辆宽范围调速运行的要求[1-3],牵引变流器驱动动力电机时一般采用多模式脉宽调制技术,即低频段采用异步调制(SVPWM)、中频段采用同步调制(非优化PWM或优化PWM)、高频段采用单脉冲控制的多模式混合脉宽调制技术(见图1)。仅在低速段采用SVPWM调制控制技术,当电机转速继续升高时,不能满足条件(开关频率/电机电频率>15),如果继续采用SVPWM调制技术,电机谐波转矩会显著增大,控制稳定性变差。一般采用同步脉宽调制(优化PWM或非优化PWM调制技术)以保证三相电流波形对称,降低尖峰电流和转矩脉动,也可以自然过渡到高频段时的方波控制(单脉冲调制)阶段[4-6]。
实际工程实践中多模式混合脉宽调制异常复杂。工程实现时,脉冲发波方式需根据负载牵引电机转速多次变换,同时必须保证各调制模式间的平滑过渡,避免引起牵引电机电流和功率的冲击,这些工程实现方法及处理手段一直以来是牵引控制系统的核心技术。
轨道牵引传动动力系统目前主流使用异步牵引电机驱动控制系统,可查到的文献也多是异步牵引电机方面,永磁牵引电机控制技术鲜有文献涉及。可根据永磁同步电机控制在工业和电动汽车上应用经验和异步牵引电机控制方面的文献进行相关永磁牵引电机控制技术的研发。其开发主要难点在于:低开关频率下电机控制性能研究、牵引逆变器单脉冲调制输出电压饱和情况下牵引电机转矩控制、低开关频率下数字控制时延影响、失效模式处理、带速重投等。一些在电动汽车驱动控制过程中未曾遇到的问题可能会在低开关频率下的牵引传动中显现[7],主要关注低开关频率下特殊脉宽调制技术在永磁同步牵引电机上的应用。
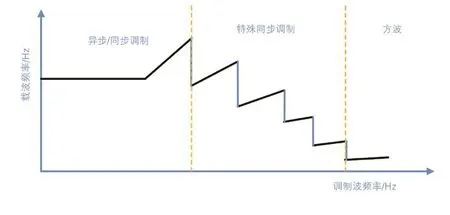
图1 多模式混合调制技术示意图
1 特定谐波消除脉宽调制技术
在牵引动力控制系统中,脉宽调制技术的优劣直接影响牵引传动系统的性能。在特殊同步调制方面,主要有非优化PWM技术(如中间60°SPWM调制技术)和优化PWM技术(如SHEPWM调制技术)在永磁同步牵引电机中的应用[1-2]。
特定谐波消除技术(SHE)较为广泛应用于受开关损耗限制的大功率驱动系统,特定谐波消除脉宽调制技术可实现功率模块极低的开关频率,同时消除指定低次谐波。其工程实践首先需将SHEPWM的开关角离线进行计算,通过傅里叶分解得到超越方程组,对方程组进行求解,获得相应开关角度值,该开关角度值可在离线仿真中进行验证。特定谐波消除技术因计算量较大,很难在线实时求解,为了芯片运行效率与控制实时性,工程实践中通常将开关角存储在程序中,以便在线查表备用。以11分频、7分频、5分频、3分频为例,建立相应的超越方程组[7-8],求解获得的开关角见图2。
基于存储于芯片中的开关角度,在控制牵引电机运行时,可通过调制度、电压相位、旋转角度查到相应开关角,以重新构建PWM脉冲序列,从而实现电机控制。11分频、7分频、5分频、3分频1个周期内的脉冲序列见图3。
2 仿真分析
基于Simulink搭建相应永磁同步电机牵引控制仿真模型,对SHEPWM控制算法进行仿真验证,当电机运行在3 000 r/min下,以7分频、11分频为例进行相关调试。电流开环控制状态下,给定电压Ud=-240 V,Uq=200 V,仿真获得各分频下电流波形情况见图4、图5。
当电机运行在3 000 r/min下,以7分频为例对电机闭环控制进行仿真调试,给定电流Id=-212 A,Iq=100 A时,仿真获得7分频下的扭矩输出情况和交直轴电流情况见图6、图7。
3 各分频间切换仿真

图2 各分频下开关角

图3 各分频的1个周期内脉冲序列

图4 三相电流@7分频开环控制

图5 三相电流@5分频开环控制
采用多模式混合脉宽调试方式,需考虑不同模式间的切换过渡问题,为了保证切换过程中尽量减小电流冲击,在切换点前后不仅需保持基波电压相位的连续性,还要保证谐波电流的相位连续性。SVPWM异步调制切换到SVPWM同步调制方式的切换实现相对较容易,因为在切换点前后载波频率相同,切换点选择在任意时刻都不会引起电流较大冲击,实践过程中各种变载波控制的应用也验证了该切换方法的实用性。同步SVPWM调试方式切换到SHEPWM特定消谐方式的过程中,需考虑三相电压基波都要保持连续性, SHEPWM调制方式在不同分频间切换时,也需考虑三相电压基波的连续性。
在仿真模型中设定好不同分频间的切换,运行过程中,自动进行11→7→5→3分频间的切换。切换相位要根据实际调试情况来定,以使其电流和电压连续,从而减小扭矩冲击。可对切换相位进行微调[9-10],在此选择切换相位为290°,仿真获得相应的三相电流波形与切换标识见图8,电机输出的电磁扭矩波形见图9。
4 基于硬件在环的控制算法调试
根据分析可知,依据电机矢量控制时得到的电压相位、调制度及转子旋转角度可重构输出PWM脉冲序列,基于电机控制板进行工程实现后,应用硬件仿真平台实现半实物的电机闭环控制,对电机控制过程进行相关测试[7-8]。
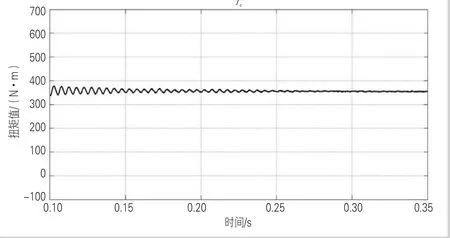
图6 三相电流@7分频开环控制

图7 dq轴反馈电流@7分频

图8 切换前后的三相电流波形与切换标识
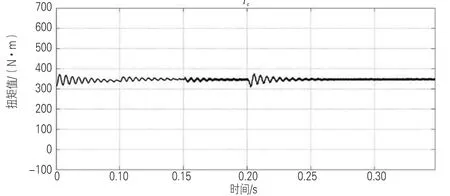
图9 电机输出电磁扭矩
基于某款电机模型,使用相同电流指令,对比100 μs控制周期下SVPWM调制技术得到的扭矩及波形情况与7、5、3各分频下的扭矩及波形情况,SHEPWM各分频下获得波形符合预期,且各模式下相同扭矩指令所得到的扭矩响应基本一致。电机在500 r/min、370 N·m状态下对不同分频进行测试,电机输出扭矩见图10。电机三相电流波形见图11。需要注意的是,测试中所采集的扭矩波形图是HIL仿真模型中的电机电磁扭矩,未经滤波处理。经过实际转动惯量滤波后,扭矩的波动会得到一定改善,尤其是轨道交通机车惯量较大的情况下,电机输出扭矩的波动会被有效抑制。
在硬件在环测试过程中,对HIL设备和控制板硬件通道的信号通过示波器采样情况进行记录。HIL仿真时,其电流通道和PWM波输出通道采样波形见图12、图13,其效果与离线仿真基本一致,符合预期。
使用目前的电机调试参数在不同分频下测试了扭矩的响应情况,扭矩响应可做到1.0~1.5 s。目前在硬件在环设备上调试获得的扭矩响应情况见图14。电机控制参数还可根据实际情况进行调试优化,在控制系统稳定运行的前提下可进一步提高响应速度,但由于所使用的SHEPWM脉宽调制技术本身就是在基于稳态得到的开关角构建的脉冲序列,故其控制输出扭矩的响应会受一定制约。达不到电动汽车驱动控制系统在高开关频率下SVPWM调制方式的快速高性能的扭矩响应。
5 结束语
通过对特殊脉宽调制技术的理论分析与研究,求解非线性超越方程,对SHEPWM的开关角进行计算并获得了相应开关角度。离线存储在程序中,可实现低频率下的控制,在开环模式下,实施VVVF控制,获得相应各分频下的电流波形;在闭环模式下,实施矢量控制,获得相应各分频下的电流扭矩波形。SHEPWM多模式间进行切换仿真,获得相应切换情况,切换时相位可以根据实际情况微调,可达到较好的预期效果。基于DSP芯片工程基本实现了SHEPWM脉宽调制技术在中频段的应用,在HIL上进行半实物仿真,其输出扭矩及波形情况符合预期。相同指令下,SVPWM调制技术所获得的扭矩与SHEPWM调制技术所获得扭矩基本一致。极低开关频率下的SHEPWM调制技术指令响应不如高频率下SVPWM的快,合理的参数会让SHEPWM调制稳定运行。此算法的研究可为轨道牵引系统控制研究提供参考。

图10 各调制方式下的扭矩波形@500 r/min、370 N·m
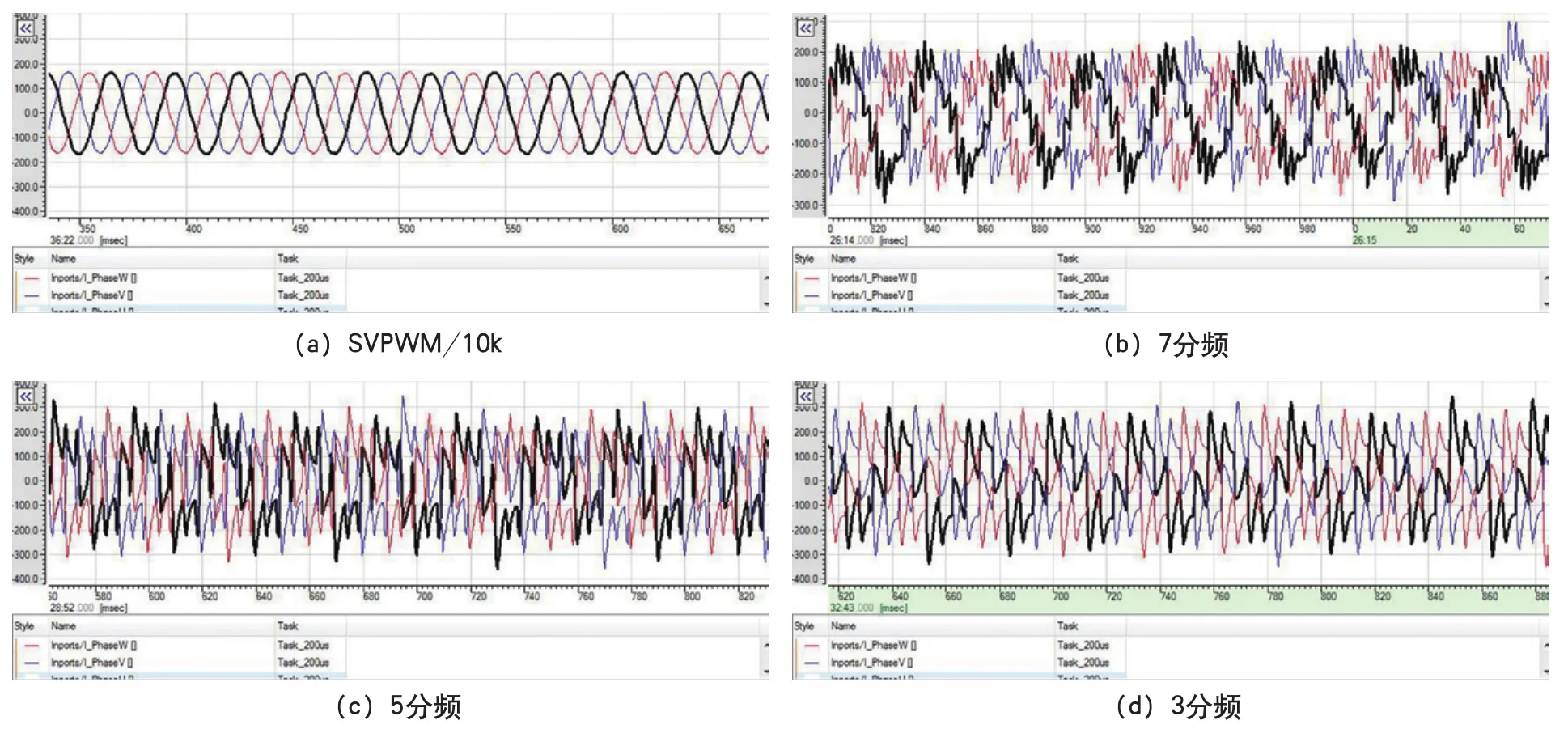
图11 各调制方式下的电流波形@500 r/min、370 N·m

图12 3、5、7分频下的波形@500 r/min、370 N·m
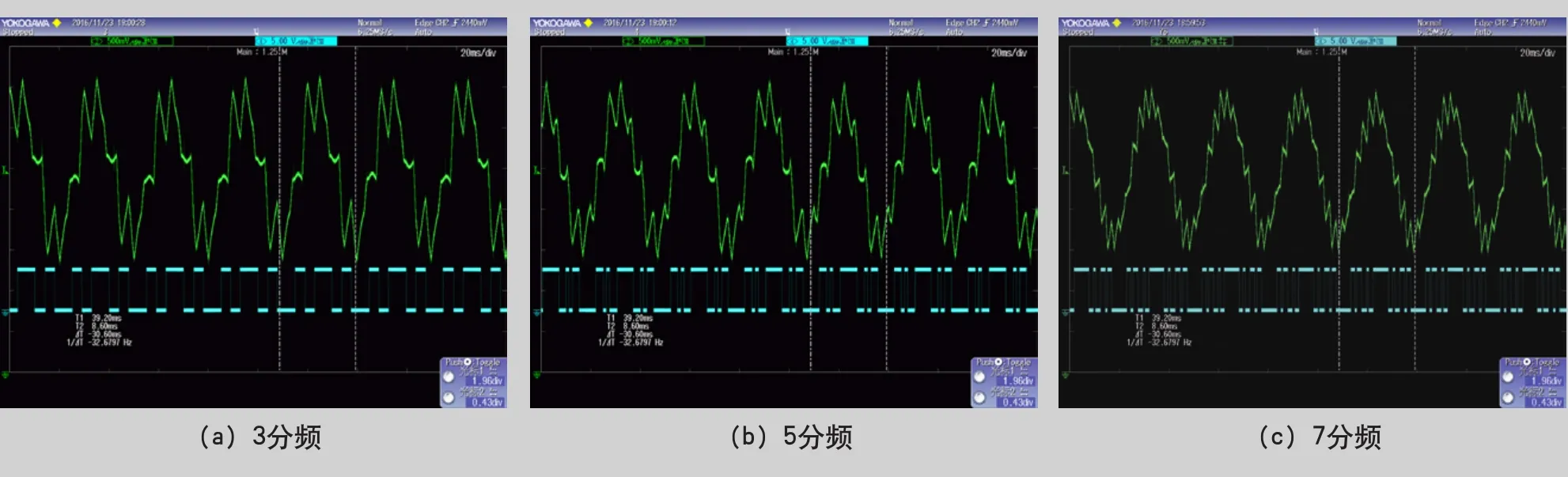
图13 3、5、7分频下的波形@500 r/min、1 500 N·m

图14 各调制方式下的扭矩响应情况@500 r/min、200~1 500 N·m