高精度时间测量芯片在激光成像系统中的应用
2018-02-25孟宏峰张浩钧王耀金
孟宏峰, 张浩钧, 唐 琳, 王耀金
(上海无线电设备研究所,上海200090)
0 引言
激光三维成像系统可以直接获取目标的外形和位置信息,很容易识别目标。针对激光三维成像雷达的各项外场实验,证实了其在复杂背景下进行目标探测和识别的能力。三维图像不仅包括位置、方位、姿态等信息,还包括了目标的几何形状、表面特性的信息。与传统的二维成像获得的信息相比,目标的三维信息能够更加全面的、真实的反映客观物体特征[1]。激光三维成像系统一般采用脉冲飞行时间法进行扫描测距成像。
脉冲飞行时间(TOF,time of flight)法是基于激光脉冲测距的方式获取像素点距离值,发射的激光脉冲在目标表面发生反射,再由接收望远镜对回波信息进行探测。设测量脉冲从激光发射系统到目标来回往返的飞行时间为t,根据传输介质中的光速c,可以得到目标距离R=c t/2,其中TOF的时间测量精度是激光三维成像系统中重要的指标。
时间数字转换技术TDC(Time to Digital Converters)广泛用于时频测量、卫星导航、激光测距和雷达定位等领域。高精度时间间隔测量模块包括TDC-GP22时差测量模块和FPGA逻辑处理模块[2]。其中,TDC-GP22时差测量模块测量脉冲飞行时间差,并把时间信号转换为数字信号;FPGA逻辑处理模块用于协调各模块的工作,包括配置芯片寄存器、发送开始测量信号、读取测量结果、发送数据到上位机进行显示与处理。文中将高精度时间测量芯片应用在激光三维成像中,系统时间测量精度小于1 ns,满足激光测距成像要求。
1 TDC-GP22测时芯片基本原理
TDC-GP22是以信号通过内部门电路的传输延时来进行高精度时间间隔测量的[3]。如图1所示,测量单元通过Start信号触发,Stop信号截止。测量过程中,需要计算开始信号Start和结束信号Stop之间所经过逻辑门的个数,来精确计算开始信号和结束信号之间的时间间隔。

图1 TDC绝对时间测量系统框架
TDC-GP22有两个测量范围:测量范围1单通道精度为45 ps,双通道典型精度为90 ps,测量范围从3.5 ns到2.5 us;测量范围2单通道典型精度为90 ps,双精度模式为45 ps,四精度模式为22 ps,测量范围从500 ns到4 ms[4]。TDC-GP22测量结果有校准值和非校准值:校准值是指TDC在测量时,对由温度和电压变化引起的误差进行校准之后所产生的测量结果;非校准值是直接读取的测量结果,不对其进行校准。为了得到精确的时间间隔测量结果,TDC-GP22一般在校准模式下工作,补偿测量中温度和电压变化的影响。采用四线SPI接口对其进行寄存器的配置、工作状态设定和数据传输,其读写时序如图2、图3所示。
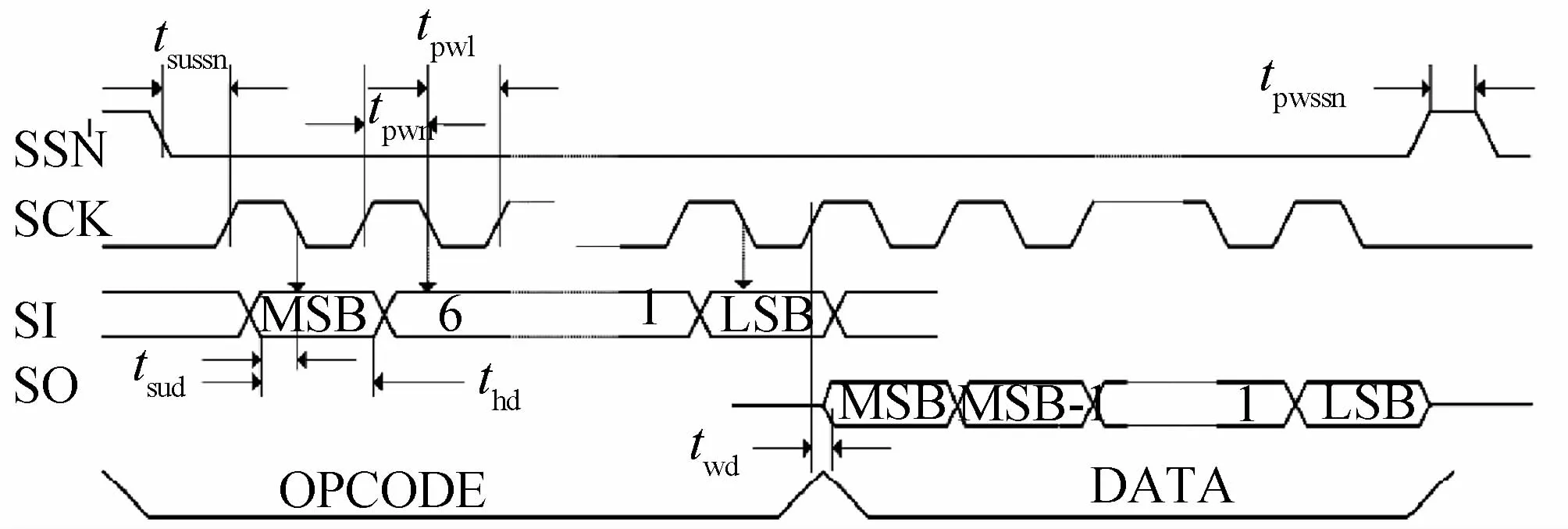
图2 TDC-GP22读时序
SPI口读写时序中,SSN为从机使能控制端;SCK为从机时钟信号输入端口;SI为数据输入端;SO为数据输出端;TDC-GP22所支持的SPI工作模式为Clock Phase Bit=1;Clock Polarity Bit=0。在读写时序图中显示了时间限制,SSN需要强制置高电平,每次读写序列之间SSN保持高电平至少50 ns。

图3 TDC-GP22写时序
2 激光三维成像系统
激光三维成像系统原理框图如图4所示。
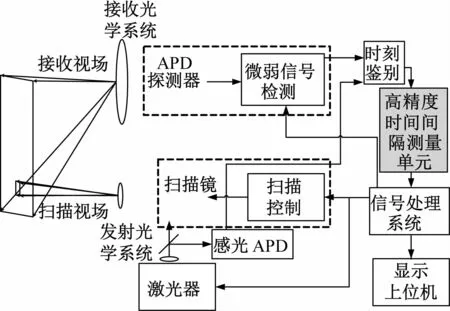
图4 激光三维成像系统与时间间隔测量电路
上位机控制脉冲激光器输出激光,利用二维扫描镜的转动通过发射光学系统,使激光信号在俯仰和方位上形成固定面积的矩形扫描视场,当激光照射目标,反射回波通过接收光学系统照射在APD探测器上,APD输出信号经过微弱信号检测模块和压控放大电路将信号进行放大,参考APD和回波APD输出信号分别经时刻鉴别后进入高精度时间间隔测量模块[5]。其中,参考APD和回波APD的时刻鉴别输出信号分别作为TDCGP22的启动和停止信号,计算出测距结果后发送到上位机实现激光三维成像[6]。
3 软件实现
系统的软件设计主要包括FPGA嵌入式程序和用MATLAB编写的上位机程序。TDCGP22配置与上位机显示流程图如图5所示,TDC-GP22电路图如图6所示。

图5 TDC-GP22配置与上位机显示流程图
本系统中使用TDC-GP22的测量范围1校准模式测量75 m内的目标,使用测量范围2测量75 m外的目标。TDC-GP22芯片是通过FPGA发送操作码来配置实现的。首先初始化测量单元与ALU数据处理单元,然后分别对寄存器reg0-reg6进行配置。配置reg0选择测量范围,自动校准;配置reg1选择计算通道的时间差,设置为stop2 HIT1-stop HIT1;配置reg2开启所有中断;配置reg3-reg6为默认值。寄存器的配置结束后,开启Start、Stop1、Stop2使能,TDC-GP22开始接收Start、Stop1、Stop2信号。完成信号测量以后,TDC根据预先设定的自动校准模式进行数据的校准。等待中断信号INTN为0时,即可发送读取数据命令,从结果寄存器中读取数据。FPGA将数据通过422接口传输到上位机,上位机接收到数据以后根据预先设定的扫描点坐标与测量结果的对应关系进行数据重排并实现三维成像。
4 实验验证
(1)TDC-GP22精度测试

图6 TDC-GP22电路原理图
激光三维成像系统的测距性能主要取决于时间间隔测量系统的测量精度,而精度测试方案需要一个稳定且可调节的时间间隔作为测试源。为此,专门设计了延时产生电路,该电路能产生两个时间间隔稳定并可精密调节的窄脉冲。由FPGA产生一个脉冲信号作为触发信号,触发信号直接进入时间间隔测量系统的开始通道,用不同长度的同轴电缆对触发信号延时来产生停止信号,从而获得两个时间间隔可调的脉冲信号,模拟脉冲激光测距中的开始和停止信号,其框图如图7所示。

图7 延时产生电路框图
选取3段不同长度的电缆,采用上述方法接入时间间隔测量芯片,连续测量1 024次,记录下来并统计,测量结果如表1所示。由表1数据可知,TDC-GP22的测量的标准差,与测量范围1的“单通道精度可达45 ps”相符。
(2)激光三维成像实验
为了测试激光三维成像系统的测量精度,在激光暗室中,搭建实验测试场地。如图8所示,连接实验设备,安置激光三维成像系统,并将实验目标放置在激光三维成像系统与接收面板之间。

表1 时间间隔测量结果

图8 测距成像实验图
目标选用两块同一材质同一颜色的泡沫板,将其中一个7 c m厚度的泡沫叠加在另一个薄的泡沫板上,进行成像实验,上位机成像结果如图9所示。
成像结果图中,以激光发射处为坐标原点,x、y为激光扫描成像视场中两个方向坐标,单位为m;z为激光发射处与目标不同位置之间的距离测量值。由图9可知,激光三维成像系统的测距精度优于7 c m,即时间间隔测量精度不低于1 ns。
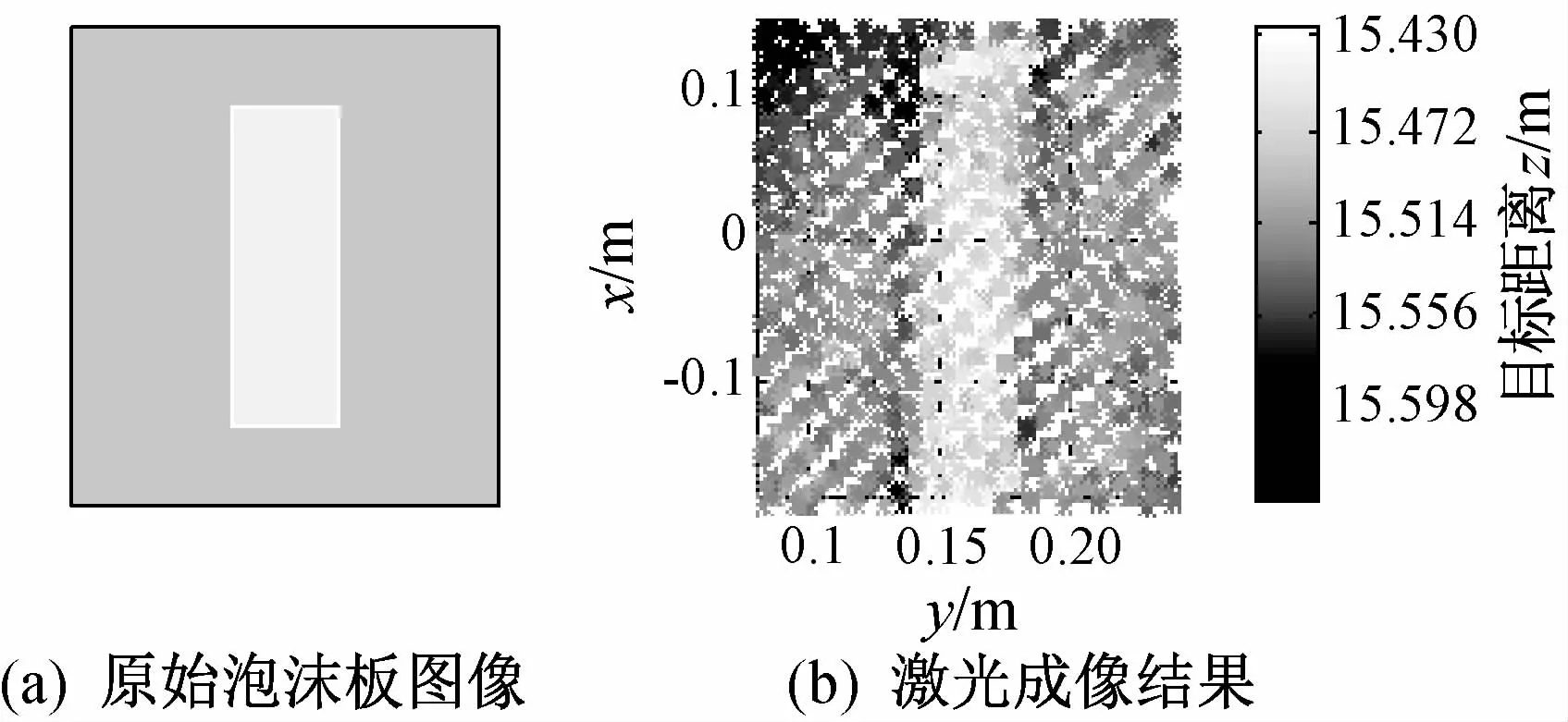
图9 激光三维成像结果
5 结论
激光三维成像系统中,将高精度时间间隔测量芯片TDC-GP22与FPGA结合进行激光测距成像。介绍了FPGA配置TDC-GP22的过程,具体有芯片初始化、芯片工作方式配置和测量结果读取。实验室搭建激光三维成像系统,采集分析数据,实验结果表明基于TDC-GP22的激光三维成像系统的时间测量精度小于1 ns,满足后续激光测距成像的要求。