导轨式劣化绝缘子自动检测设备运动机构设计与仿真计算分析
2018-02-08谷凯凯许晓路刘益岑李德洋
谷凯凯,程 林,许晓路,苏 磊,刘益岑,李德洋
(1.国网电力科学研究院武汉南瑞有限责任公司,武汉430000;2.国网上海市电力公司,上海200000;3.国网四川省电力公司,成都610000)
0 引言
绝缘子在架空输电线路中主要起着支撑导线和防止电流回地两个基本作用,绝缘子的运行安全会影响到整个输电系统的安全可靠性[1]。然而,随着时间积累,绝缘子长期暴露在复杂的外界环境下,受到机电负荷、雷击、冰冻、强电场、温湿度变化等的影响,导致其绝缘性能逐渐下降甚至引发输电系统事故。有效检测并及时更换劣化绝缘子,能够大大降低输电系统事故发生率,提高电力系统的安全稳定运行[2-3]。
长期以来,绝缘子的检测一直依靠人工完成。人工检测绝缘子的工作量大,劳动时间长,检测效率低,检测精度欠缺,难以适应当前电力生产对安全的要求。相比直接观测法,紫外成像法,红外成像法,超声波法,憎水性检测方法,泄漏电流测量法等几种用于绝缘子带电检测方法的实验室及现场运行情况来看,电场法成本低廉,直接检测,操作简单,更加适用于国内推广使用,为高压输电线路绝缘子带电检测提供了一种行之有效的检测手段[3-10]。
近年来,国内相关机构对绝缘子检测机器人进行了大量研究,利用移动机器人携带检测装置对绝缘子进行检测,取得了一些成绩,但要实现全自主检测,多种类型绝缘子通用等功能,其结构设计难度较大,技术不成熟,实际应用效果不理想,总体上仍处于探索阶段。目前绝缘子检测机器人的研究主要有轮式、履带式、手爪爬行式三种类型[11-14]。轮式机器人结构简单、成本较低,但路径、姿态稳定性不足,其应用范围受到限制。履带式机器人适用于超高压输电线路耐张塔双联瓷质耐张绝缘子串带电检测,且该类机器人体积较大,携带不便。手抓爬行式机器人采用手爪和多轴联动机构,通过控制手爪的开合和手爪位置的移动来驱动机器人在绝缘子串上行走,该类机器人机构复杂,运动不便,成本高,受绝缘子串型号影响较大。
笔者提出了一种基于电场法的导轨式输电线路劣化绝缘子检测设备,其移动机构具备遥控功能,可使电场检测装置在绝缘子上平滑、轻巧的移动,以提高检测精度。设备利用电场传感器实现对绝缘子串电场分布的检测,判断绝缘子劣化情况,具有操作简便、准确性高适应多电压等级、多种绝缘子类型等优势,能够提高输电线路劣化绝缘子的检测效率,减少作业强度,对保证输电线路安全稳定运行具有十分重要的意义。
1 绝缘子带电检测设备总体设计
根据功能需求本绝缘子检测设备可分为装置主体、后台解析部分、手持遥控器终端等部分组成,整体框架结构如图1所示。
1.1 主体部分
装置主体部分包含运动执行、检测、控制三个模块。
1.1.1 运动执行模块
运动执行模块通过固定辅助支架固定在杆塔上,调整支架角度后,将搭载有移动小车的绝缘导轨固定在支架之上,开启电源之后,通过手持遥控器控制移动小车带动电场检测装置沿导轨方向做前进、后退,停止运动,完成绝缘子的检测。
1.1.2 检测模块
检测模块主要采用电场传感器检测电场数据,经过滤波放大电路后将检测数据传输到MCU进行处理。
1.1.3 控制模块
控制模块主要是让主控MCU接收手持遥控器的操作命令,按照检测工作流程控制移动小车在导轨上精确运动,并将电场检测数据、位置数据、时间等一系列测量数据通过无线收发模块传输给手持端软件及遥控器。
1.2 后台解析部分
手持端通过无线收发模块接收到检测数据包,交给劣化绝缘子分析软件,对数据包进行解包,数据分类,结合电场法检测模型绘制被测绝缘子串的电场分布曲线,再根据曲线曲率变化及与正常情况电场分布曲线作比较,输出检测结果。
1.3 手持遥控器及终端
遥控器具备检测任务的开启、结束。手动检测模式下,控制移动小车前后运行、停止。
手持终端可录入待检测绝缘子、线路的基本信息资料,并具备实时检测数据的接收显示、存储、曲线绘制,历史数据查询等功能。
2 导轨式运动机构设计
针对野外输电线路杆塔上的绝缘子进行带电检测,需要使用方便灵活,并且适应电压等级500 kV及以下和各种安装角度的绝缘子的特点,需要检测设备满足操作简便,轻量化、自动化、通用化程度高,性能稳定,抗干扰性好等诸多条件。因此笔者设计了一种具备遥控功能的,在一定角度范围内可以多自由度动作的有轨移动机构,作为电场检测装置的搭载平台。导轨式绝缘子分布电场检测设备运动机构结构如图2所示。

图2 绝缘子检测设备运动机构结构图Fig.2 Structure diagram of motion mechanism of insulator testing equipment
2.1 移动小车与检测装置
移动小车通过连杆搭载检测装置,使用遥控器控制其运动,可使检测装置沿导轨平滑运动,平稳检测绝缘子串附近的电场强度分布,降低检测数据的波动性,最大限度地减轻操作人员的劳动强度。
移动小车以齿轮齿条作为传动方式,采用带减速机的微型步进电机作为驱动动力,移动速度连续可调。导向滚轮采用MC尼龙材质,密度小,重量轻,免润滑,并安置了减震装置,可适应绝缘导轨伸长后的截面形状变化,避免移动过程中出现的剧烈抖动,造成的分析误判。见图3。
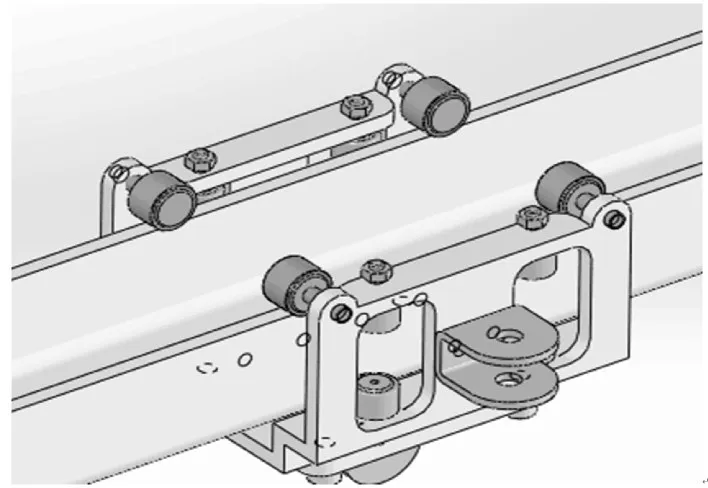
图3 移动小车示意图Fig.3 Mobile car diagram
检测装置本体结构如图4所示,主要由检测仪(内置电场传感器、光电传感器)、连杆接头、导向罩(ABS工程塑料)等部分组成。电场传感器为电容式电场传感器,主要用于对绝缘子串纵向电场的测量;光电传感器主要用于精确定位伞裙位置,便于检测仪在绝缘子串上获取有效一致的电场数据;导向罩,在满足与绝缘子串表面紧密贴合的前提下,使移动人小车能带动检测仪顺利在绝缘子串移动。为确保检测装置能在500 kV电压等级以下常用复合及瓷质绝缘子串上稳定平滑移动,设计了三种大小的绝缘子导向罩,如图5所示。
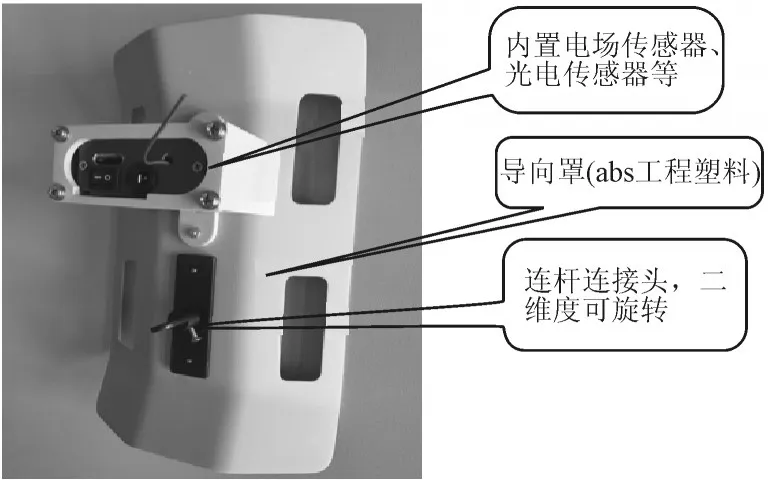
图4 绝缘子检测装置示意图Fig.4 Schematic diagram of insulator testing device
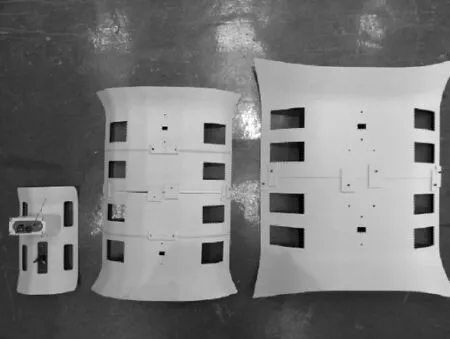
图5 3种尺寸绝缘子导向罩Fig.5 Three sizes insulators guide cover
移动小车搭载分布电场检测装置,检测模块检测绝缘子串电场数据并将信号传至MCU进行处理,利用蓝牙实时回传数据给塔上作业人员手持端软件进行数据分析、存储及曲线绘制,从而判断出低零值绝缘子的位置。
2.2 绝缘导轨及辅助固定支架
绝缘运动导轨采用高强度绝缘材料加工,与传动机构能够很好地固定,并能够多节拼接,适用于多种长度的绝缘子串检测需要,加上稳定支撑作用的导向滚轮,使移动机小车在其上能平滑的直线运动。根据电压等级的不同,能快速增减绝缘导轨的长度,以适应现场操作的需要。
辅助固定支架可在0~90°范围内转动,能方便导轨固定在杆塔上,确保轨道能够尽可能平稳的转动角度保持与绝缘子的距离,以免产生较大波动,形成误判。见图6。
3 绝缘运动导轨仿真分析与校验
由于绝缘子检测设备需要进行轻量化设计,笔者在材料选择和受力状态上进行了仿真分析,为结构优化处理提供参考依据。
3.1 计算方法与内容
计算方法为有限元法[15-16],所用计算软件为有限元分析软件ANSYS Workbench 14.5。首先导入Solid works建立的绝缘子检测支架模型,做相应简化处理并进行剖分,然后施加载荷并确定约束条件,最后对计算结果进行分析。

图6 绝缘导轨与辅助固定支架Fig.6 Insulation guide rails and auxiliary fixed bracket
详细计算内容如下:
1)60 mm×30 mm×3 mmU型槽管、60 mm×30 mm×3 mm矩形管、50 mm×30 mm×4 mmU型槽管三种管型绝缘导轨在辅助固定支架上固定,且检测设备拖曳小车在最远端时,支架的整体挠度分布情况、转动套管的应力分布情况。
2)更改设计为带悬臂的简支梁结构,支架的整体挠度分布情况、转动套管的应力分布情况。
3)转动管臂长度由300 mm减少到200 mm,转动管臂的应力分布情况。
4)辅助固定支架型材为30 mm,分析竖直固定的杆件形变能否满足强度要求。
3.2 仿真模型设定
图7至图9分别为Solidworks绝缘子检测支架模型的正视图、俯视图、侧视图和等轴侧图。

图7 检测支架正视图、俯视图Fig.7 Front view and top view of detecting bracket

图8 检测支架侧视图Fig.8 Side view of detecting bracket
整个模型大致可分为四个部分:
1)辅助固定支架:由杆件、铰链扣、铰接头等部件组成,起支撑作用。

图9 检测支架等轴侧图Fig.9 Isometric view of detecting bracket
2)扣件:由导柱上下扣、吊杆凹扣、转动套管等部件组成,作用是连接导轨和竖直管件。
3)导轨:通过插销和塔扣连接固定五根绝缘导轨。
4)检测仪。
支架模型图如图10、图11所示,其相关结构和材料设置如下:
1)绝缘导轨总长7.5m,截面分别为60mm×30mm×3 mm(U型)、60 mm×30 mm×3 mm(矩形)、50 mm×30 mm×4 mm(U型);构成辅助支架的杆件长度分别为1.3 m、0.8 m和0.4 m;拖动小车移动的连杆长度为0.8 m。所用材料为环氧酚醛层压布棒3 240。弹性模量为24 GPa,泊松比为0.35,密度为1 800 kg/m3。
2)吊杆上扣板、铰链扣、移动锁紧扣、单耳铰链头、双耳铰链头、堵头等部件所用材料为钛Ti-8AI-1Mo-1V。弹性模量为120 GPa,泊松比为0.32,密度为4 370 kg/m3。
3)转轴、导体下扣、导体上扣、弹簧压扣、转动套管、联接板、轴承套、端板、活动铰链扣、活动铰链轴管所用材料为Q235A。弹性模量为210 GPa,泊松比为0.3,密度为7 850 kg/m3。
4)定位销、弹簧柱塞、滚针所用材料为45结构钢。弹性模量为190 GPa,泊松比为0.3,密度为7 800 kg/m3。
5)线盘、连接块、滚针排固定环件所用材料为2A12(铝合金)。弹性模量为74 GPa,泊松比为0.36,密度为2 850 kg/m3。
6)部分仅靠配合固定的区域增加连接件,并用布尔操作粘连。

图10 检测支架模型图Fig.10 Model diagram of detecting bracket

图11 检测支架局部剖分图Fig.11 Partially cutaway diagram of detecting bracket
3.3 加载与求解
本文中仿真的前提条件是假设检测装置(小车)一直搁置在绝缘子上,并考虑移动小车搁置在绝缘导轨最远端时的极端情况,前置约束条件如下:
1)辅助支架是固定的,底部应施加一个固定约束。
2)移动滑环受到牵引力和反方向的摩擦力,因实际过程中为缓慢匀速运动,可视为二力平衡,可不另外施加力。
3)整个检测装置受重力作用,仿真过程对全局施加重力加速度进行重力场模拟。
4)小车仅能在切向运动,并且受到一个向上的支持力,仿真过程通过对小车施加Frictionless Sup⁃port约束确保小车仅在切向运动。
3.4 仿真分析与结论
首先对导轨为60 mm×30 mm×3 mmU型管(转动套管长度为300 mm)时的挠度以及转动套管的应力分布进行了分析,其支架的总变形云图如图12所示。

图12 导轨为60×30×3U型槽管时的总变形图Fig.12 The total deformation of the guide rail as a 60×30×3 ushaped slot tube
绝缘导轨受到重力作用从而位移较大,最大位移出现在绝缘导轨的中间至右端处,约为21.2 mm。绝缘导轨受到重力下垂,而左侧与转动套管相接部分受到向上的支持力,右侧因检测小车搁置在绝缘子上而受到连杆传递的左上方向的支持力,因而最大位移处出现在绝缘导轨的中间位置,具体位置与导轨、转动套管的长度、质量等参数有关。
由局部变形图13,可观察竖直管的挠度分布。挠度最大值出现在竖直管的上方,约为2.8 mm,原因是重力对竖直管件产生力矩。辅助支架下方施加固定约束,因此支架部分挠度较小。杆件2的远端因竖直管的向右的弯矩微微上翘。
从转动套管应力分布云图14可以看出,应力的最大值出现在靠近转轴(转动套管与竖直管件连接部件)处,大小为20.97 MPa。

图13 导轨为60×30×3U型槽管时的局部区域变形图Fig.13 The local deformation of the guide rail as a 60×30×3 U-shaped slot tube

图14 导轨为60×30×3U型槽管时的转动套管等效应力图Fig.14 Equivalent stress diagram of rotating bushing of the guide rail as a 60×30×3 U-shaped slot tube
采用同样的方法,分别对不同尺寸的导轨以及不同长度套管的组合进行了仿真分析,结果如表1所示。
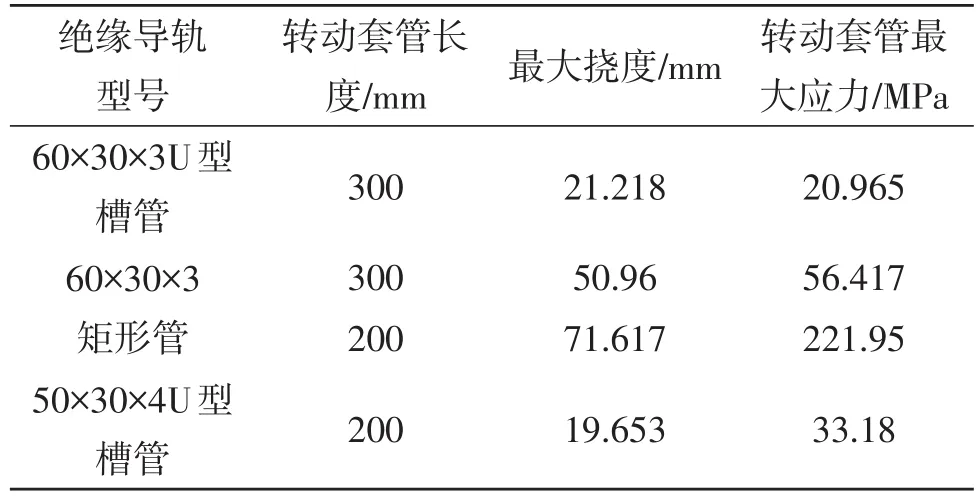
表1 不同管型、套管长度的最大挠度、应力结果Table 1 Maximum deflection and stress results of different tube type and bushing length
由表1可知:
1)转动套管长度一致时,采用U型槽管后整个检测支架的变形明显小于矩形管,即U型槽管优于同型矩形管,且节省材料。
2)当转动套管长度由200 mm增加到300 mm时,可减小绝缘导轨的挠度,改善转动套管的等效应力。
3)50×30×4U型槽管整个检测支架的挠度及转动套管的等效应力优于60×30×3U型槽管和矩形管。
在选择50×30×4U型槽管的作为导轨后,本文进一步分析计算了在导轨左端适当增加向下拉力时的整体形变和套管应力分布,图15所示为总变形图。
为方便对比分析,转动套管长度仍选为200 mm,在导轨最左端施加200N竖直向下拉力,此时整个支架相当于带悬臂的简支梁。绝缘导轨受到重力作用从而位移较大,最大位移出现在绝缘导轨的右端处,约为16.706 mm。绝缘导轨受到重力下垂,导轨最左端受到向下的力,大小为200N,此时导轨类似于杠杆,转动套管充当支点,竖直管件右侧的绝缘导轨被顶起。
如图16所示,竖直管件的挠度最大值出现在竖直管的上方,约为1.99 mm。杆件2的远端因竖直管的向右的弯矩微微上翘。
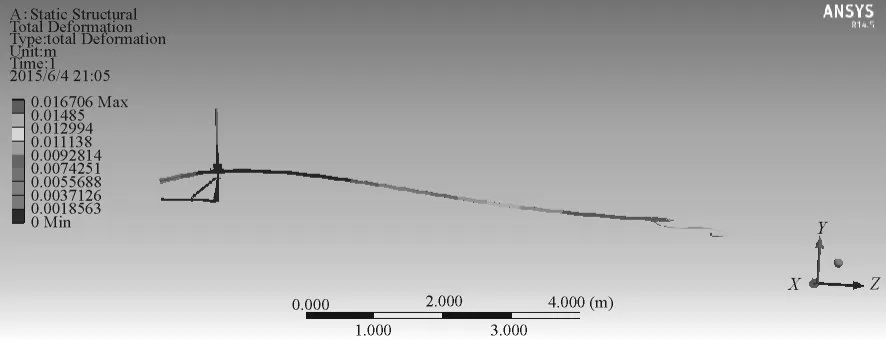
图15 导轨为50×30×4U型槽管,导轨左端施加200 N拉力时的总变形图Fig.15 The total deformation of,the guide rail as a 50×30×4 U-shaped slot tube,200 N tension force is applied at the end the left
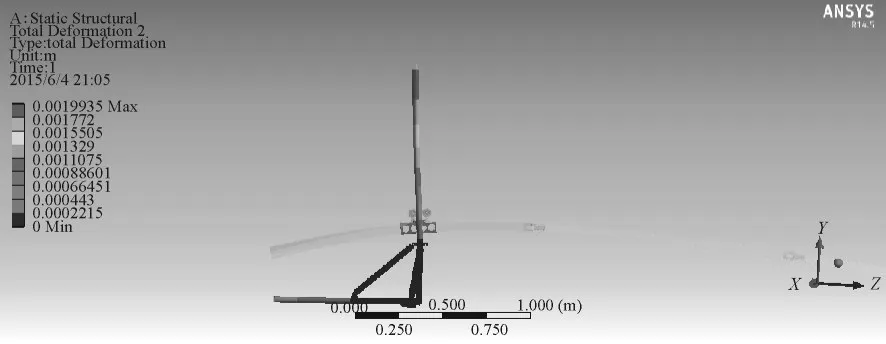
图16 导轨为50×30×4U型槽管,导轨左端施加200N拉力时的局部区域变形图Fig.16 Local deformation of the guide rail as a 50*30*4 U-shaped slot tube,200 N tension force is applied at the end the left
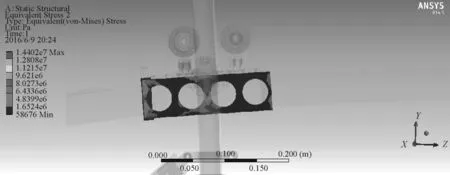
图17 导轨为50×30×4U型槽管,导轨左端施加200 N拉力时的转动套管等效应力图Fig.17 Equivalent stress diagram of rotating bushing of the guide rail as a 50×30×4 U-shaped slot tube,200 N tension force is applied at the end the left
如图17所示,等效应力分布与之前略有不同,出现了两个峰值区:一个是靠近转轴的区域,一个是转动套管左侧区域。出现第二个峰值的原因是导轨最左端的力让绝缘导轨产生一个弯矩,套管左侧产生较大的剪切应力。最大的应力值达到14.4 MPa。
由表2可知,在导轨左端适当增加向下拉力可进一步减小导轨的整体变形和套管应力,保证安装稳定性,故可根据现场实际情况,选择左端加力的方式改善导轨的形变,保证绝缘子电场检测的精确性。

表2 左端施加200 N拉力后仿真结果对比Table 2 The simulation results comparison after 200 N tension force is applied at the end the left
根据以上仿真分析结论,笔者选用300 mm的转动套管可有效改善其应力分布,绝缘导轨采用高强度绝缘材料加工,分为五节,每节长1500 mm(不含公头长度),横截面长度50 mm,横截面宽度30 mm,厚度4 mm,U型槽管。绝缘导轨由可拼接的绝缘杆体组成,各导轨均有编号,相邻编号导轨能够通过母头公头紧密牢靠地拼接固定,根据电压等级的不同,可快速增减绝缘导轨的长度,以适应现场操作的需要。固定后移动小车能在其上平滑稳定的进行直线运动,带动电场检测装置进行绝缘子检测。
4 现场试用
根据仿真分析的最优结果,试制了导轨式劣化绝缘子带电自动检测设备样机,如图18至图20所示。
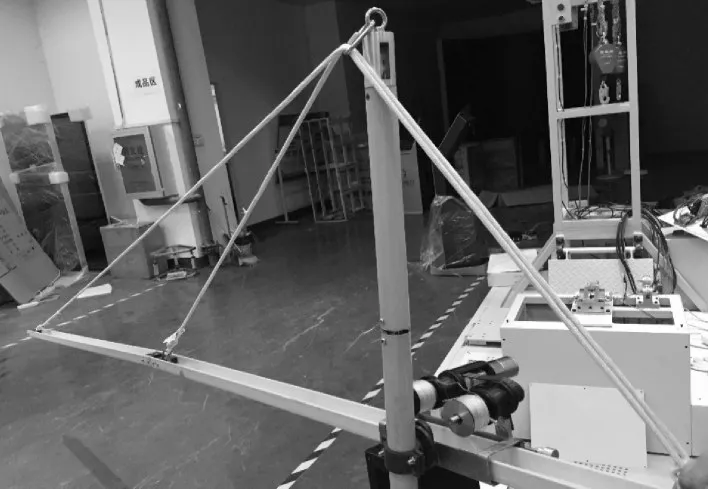
图18 耐张串瓷质绝缘子电场检测Fig.18 tension string of porcelain insulator electric field detection

图19 复合绝缘子电场检测图Fig.19 Electric field detection figure of composite insulator
为验证样机的实际检测效果,2015年10月,在220 kV永阳Ⅱ回线路上进行了现场试用。
现场试用结果表明,本方案设计的绝缘子检测设备能在绝缘子上平滑、轻巧移动,从而提高了检测精度,利用电场传感器实现对绝缘子串电场分布的检测,判断低值绝缘子所在位置,提高输电线路劣化绝缘子的检测效率,为现有绝缘子检测手段提供了重要补充。
图20 耐张串瓷质绝缘子电场检测Fig.20 Electric field detection figure of tension string of porcelain insulator
5 结论
论述了一种新颖的劣化绝缘子分布电场带电检测设备总体设计方案,着重阐述了其运动机构的工作原理及实现方式,针对关键结构采用有限元法进行了仿真分析,在保证机构运行稳定的前提下为轻量化设计提供了参考依据。
与现有的绝缘子检测设备、检测手段相比,本文提出的机构具有运动平稳、操作简单、适应性好等优点,因而更具有实用价值。设备现场安装便捷,减少作业人员高空作业时间,可用于检测多电压等级、多类型的输电线路绝缘子,具备较强的拓展性,能有效检测出劣化绝缘子并实现准确定位,对确保电力系统的安全稳定运行具有重要意义。
[1]国家电网公司.110(66)kV-500kV架空输电线路管理规范[M].北京:中国电力出版社,2006:1-171.State Grid Corporation of China.110(66)kV-500kV over⁃head transmission lines management specification[M].Bei⁃jing:China Elect-ric Power Press,2006:1-171.
[2]王昌长,李福祺,高胜友.电力设备的在线监测与故障诊断[M].北京:清华大学出版社,2006.WANG Changchang,LI Fuqi,GAO Shengyou.On-line Monitoring and fault diagnosis of power equipment[M].Bei⁃jing:Tsinghua University,2006.
[3]朱虎,李卫国,林冶.绝缘子检测方法的现状与发展[J].电瓷避雷器,2006(6):13-17.ZHU Hu,LI Weiguo,LIN Ye.Present and future develop⁃ment of detection methods for composite insulator[J].Insu⁃lators and Surge Arresters,2006(6):13-17.
[4]陈瑶,皱德华,牛捷,罗日成,唐祥盛.500kV输电线路中低零值绝缘子对长串绝缘子电位和电场分布的影响[J].电瓷避雷器,2015(3):29-34.CHEN Yao,ZOU Dehua,NIU Jie,LUO Richeng,TANG Xiangsheng.The impact of zero and low resistance insula⁃tor on potential and electric field distribution of long insu⁃lator strings in the 500kV transmission line[J].Insulators and Surge Arresters,2015(3):29-34.
[5]程养春,李成榕,马晓华.电场法带电检测零值绝缘子的研究[J].高电压技术,2002(12):8-9.CHENG Yangchun,LI Chengrong,MA Xiaohua.Study on Online Detection o f Faulty Compo si te Insula to rs by Elect ric Field Method[J].High Voltage Engineering,2002(12):8-9.
[6]沈小军,江秀臣,程养春,曾弈,丘东锋.电场法在线检测直流绝缘子的可行性研究[J].电网技术,2005,29(4):36-40.SHEN Xiaojun,JIANG Xiuchen,CHENG Yangchun,ZENG Yi,QIU Ddongfeng.Research on feasibility of on site DC insulator detection by electric field method[J].Pow⁃er System Technology,2005,29(4):36-40.
[7]陈智勇,蒋学军,李婧.复合绝缘子伞裙损坏对绝缘子电场分布的影响研究[J].电瓷避雷器,2013(5):44-53.CHENG Zhiyong,JIANG Xuejun,LI Jing.Studies of the effect of the shed damage of composite insulator on elec⁃tric field distribution along insulator[J].Insulators and Surge Arresters,2013(5):44-53.
[8]杨铁军,续晋江.光学电场传感器性能对劣质绝缘子检测结果的影响[J].电瓷避雷器,2014(5):17-20.YANG Tiejun,XU Jinjiang.Influence of optical electric field sensor performance on faulty insulator detection results[J].Insulators and Surge Arresters,2014(5):17-20.
[9]郑中胜,邓慰,李兵,李炼炼,方书博,程鹏.基于光电场传感器的劣化绝缘子检测系统[J].电瓷避雷器,2014(6):38-43.ZHENG Zhongsheng,DENG Wei,LI Bing,LI Lianlian,FANG Shubo,CHENG Peng.Detection system of deterio⁃ration insulators based on optical transducer[J].Insula tors and Surge Arresters,2014(6):38-43.
[10]李婵虓,牛犇,增嵘,余占清,张福增.基于光电电场传感器的复合绝缘子内部绝缘故障检测[J].高电压技术,2014,40(8)2422-2428.LI Chanxiao,NIU Ben,ZENG Rong,YU Zhanqing,ZHANG Fuzeng.Detection of internal insulation defects of composite insulator based on electro-optic electric field sensor[J].High Voltage Engineering,2014,40(8)2422-2428.
[11]何磊,王洪光,刘爱华,王林.一种新型悬垂绝缘子检测机器人机构设计[J].智能系统学报,2015,10(4):541-547.HE Lei,WANG hongguang,LIU Aihua,WANG Lin.Mech⁃anism design for a novel suspension insulator detection ro⁃bot[J].CAAI Transactions on Intelligent Systems,2015,10(4):541-547.
[12]胡春江,刘学仁,赵德利,温定筠,张凯.一种绝缘子检测机器人的应用研究[J].信息技术与信息化,2014(3):126-128.HU Chunjiang,LIU Xueren,ZHAO Deli,WEN Dingjun,ZHANG Kai.The application research of insulator detect⁃ing robot[J].Information Technology and Informatization,2014(3):126-128.
[13]曹涛,孙大庆,赵德利,张永生,付崇光.盘形瓷绝缘子检测机器人在架空输电线路中的应用研究[J].电瓷避雷器,2013(2):11-16.CAO Tao,SUN daqing,ZHAO Deli,ZHANG Yongsheng,FU Chongguang.Research on the application of disc type porcelain insulators detection robot in overhead transmis⁃sionlines[J].InsulatorsandSurge Arresters,2013(2):11-16.
[14]郭小昆.一种新型悬垂绝缘子串攀爬机器人的设计[D].沈阳;东北大学,2014.GUO Xiaokun.The design of a new suspension insulator string climbing robot[D].Shenyang:Northeastern Universi⁃ty,2014.
[15]丁薇,谭向宇.基于有限元分析的悬式绝缘子串电场仿真[J].云南电力技术,2015(1):11-13.DING Wei,TAN Xiangyu.Electric field simulation and cal⁃culation of the suspension insulators based on finite ele⁃ment analysis[J].Yunnan Electric Power,2015(1):11-13.
[16]夏强峰.瓷质悬式绝缘子劣化非接触式检测方法的研究[D].重庆:重庆大学,2010.XIA Qiangfeng.Research on non-contact method of detect⁃ing faulty porcelain suspended insulators[D].Chongqing:College of Electrical Engineering of Chongqing University,2010.
