基于肌肉生理信号的操纵舒适性评价
2018-02-05钱佩伦刘明周
扈 静 钱佩伦 刘明周 张 淼 郑 达
合肥工业大学机械工程学院,合肥,230009
0 引言
操纵舒适性是机电工程与人因工程交叉的前沿课题[1-2]。人机交互过程操纵舒适性是指操纵者在一定时间内传递操纵指令给操纵对象并改变其运行状态的过程中,系统反映出的适应操纵者生理与心理特征的程度进而使操纵者能够安全、健康、高效工作的能力[3-6]。在日常驾驶操纵过程中,与上肢操纵相比,长时间的下肢操纵更容易造成不舒适感知[7]。尤其是在等待红绿灯和跟车缓慢行驶时,左脚踩踏在离合器踏板怠速位置,这一系列重复、单调、且持续时间较长的动作将带来直接的负面影响,驾驶员腿部感到疲劳酸痛,长期作业易导致腿部肌肉不适。
但是目前对操纵舒适性的研究大多是单纯从操作对象的机构原理,直接针对操纵机构的动力学特征制定标准参数用以对比评价操纵舒适性,即在人机交互中多从“机”的角度思考,而忽略了“人”这一重要因素[8-9]。少数从操纵者角度对舒适性进行测评的,则以主观评价方法制定舒适性评级标准[10-11],一定程度上缺乏客观性。
操纵者在人机交互过程中的肢体肌肉活动(如肌肉的发力与受力)是影响操纵舒适性和疲劳感的直接原因,而肌电信号可以在一定的程度上反映肌肉收缩功能的变化,在人机工程学研究领域有良好的应用价值,可以较为客观地表征操纵过程中操纵者肌肉的疲劳和舒适性[12-13]。本文采用肌肉生理信号表征肢体肌肉受力,用生理信号这一客观特征参数,主客观结合,定量描述舒适性这一主观评价。以普通型轿车中应用较为广泛的离合踏板操纵为例,充分考虑“人”的因素,采集人体生理信号特征参数,对人机交互操纵过程中腿部的主要肌肉的肌电信号进行测量,运用正则化径向神经网络,对离合踏板操纵舒适性进行客观评价。
1 选取肌肉生理信号特征参数
操纵舒适性的影响因素多与人体发力和受力有关,相应的,所构建的操纵舒适性评价模型也与人体局部受力特征相联系。不同肌肉在操作过程中所受的肌肉力不同,人体所消耗的能量不同,感受到的疲劳程度和舒适性也不尽相同。人机交互操纵过程中,同步采集操纵过程中的主要受力肌肉表面肌电信号(surface electromyography, sEMG)。对sEMG的处理一般分为时域分析(如肌电积分值、均方根值RMS)和频域分析(如平均功率频率、中值频率),本文采用时域分析中的均方根值对sEMG进行处理,均方根值的计算公式为
(1)
式中,R为肌电信号均方根值;s为表面肌电信号。
定义计算的每个记录时间T=0.2 s,通过积分计算,可以根据一段时间的肌肉生理信号值表征肌肉舒适性和疲劳程度[14]。本文选取人机交互操纵全过程主要操纵肌肉的生理信号均方根值的最大值作为评价指标。
2 操纵舒适性主观评价
人机交互操纵舒适性的主观评价是操纵者在人机交互操纵过程中,依据操纵感知强度对操纵舒适性进行评价。操纵感知强度I包括,操纵者全身整体操纵感知强度I1和交互过程中与机器接触的局部肢体感知强度I2。
针对操纵舒适性的主观测评,本文采用传统的心理学量表——李克特量表,建立7点量表[15],如图1所示,线段右端代表了较高的舒适性水平,自左向右,操纵者的舒适性感受逐级递增。被试者根据自己的主观感受,对人机交互操纵舒适性按照量表语意进行评价,并在量表相应位置上打分。

图1 操纵舒适性主观评价量表Fig.1 Subjective evaluation scale of handling comfort
在人机交互操纵过程中,对操纵舒适性进行评价,构建操纵感知强度模型I,根据上述量表,相应地得到整体操纵感知强度I1、局部肢体感知强度I2两项评分结果。对I1、I2评分赋权:
I=ρ1I1+ρ2I2
(2)
其中,ρ1、ρ2为权重系数,ρ1+ρ2=1,权重系数通过大量实验数据归一化得到。
3 驾驶者操纵舒适性映射模型
首先,基于人工神经网络,依据操纵者肌肉生理信号,用客观参数构建驾驶舒适性评价模型。然后,利用大量的样本集对模型进行不断的训练、验证及优化,使该模型趋近最优。在此基础上,依据该模型的映射关系,从大量的样本集中统计出某一类动作的操纵舒适性等级对应的人体生理信号特征参数。
在不同的人机交互操纵过程中,利用正则化RBF网络构建操纵者肌肉生理信号特征参数与操纵舒适性综合评价结果的映射模型,如图2所示。然后,依据人体生理信号特征参数对驾驶舒适性进行较为定量客观的评价。

图2 正则化RBF网络Fig.2 Regularization RBF network
图2中,X=(x1,x2,…,xN)为输入向量;隐节点j的激活函数(基函数)φj(X)(j=1,2,…,P)为Gauss函数;W为输入权值矩阵;wjk(k=1,2,…,l)为隐层第j个节点与输出层第k个节点间的突触权值;Y=(y1,y2,…,yl)为网络输出;输出层神经元采用线性激活函数。
输入训练集中的样本Xp=(r1(t),r1(t),…,rm(t)),rm(t)为操纵者人机交互过程中,第m块肌肉表面肌电信号的均方根;对应的期望输出dp=Ip,Ip为人机交互操纵训练时,操纵者舒适性主观评分,Ip=1,2,…,7。为确定网络隐层到输出层之间的p个权值,需要将训练集中的样本逐一输入,从而得到关于未知系数wp(p=1,2,…,P)的线性方程组:
(3)
令φip=φ(Xi-Xp),其中i,p=1,2,…,P,则式(3)可以改写为
(4)
令Φ为P×P阶矩阵,W、d分别为系数向量和期望输出向量,则式(4)可以写成矩阵形式:
ΦW=d
(5)
若Φ为可逆矩阵,即可求解系数向量W:
W=Φ-1d
(6)
通过人机交互实验,对交互过程中操纵者肌肉生理信号特征参数进行样本数据采集。根据操纵舒适性主观评价模型,主观评价各个样本集对应的舒适度等级。将样本数据分为训练集和测试集两个部分,训练集样本数据用于训练求解模型的系数向量W,将W代入测试集求解期望输出dp,通过验证模型精度,使模型达到最优。
4 实例分析
实验车辆为42款不同品牌不同型号的轿车,表面肌电信号数据通过全无线GPS表面肌电测试仪Trigno Mobile采集。该实验有10人参与,参与者全为男性,年龄在22~40岁之间,平均年龄为32.7岁,驾龄均在2年以上,且均没有影响操纵功能的疾病,也没有任何疼痛或心理因素等可能影响操纵舒适性的情况。在听到开始的口令后,匀速将踏板踩到极限位置,停顿后匀速返回初始位置并停顿,重复以上动作3次。
踏板操纵动作主要涉及到腿部肌肉,然而腿部肌肉众多,且不同肌肉在踏板操纵过程中的活动性相差较大。现有研究结果表明,在踏板操纵过程中,主要涉及到的腿部肌肉为大腿的股直肌(RF)、股内侧肌(VM)、股外侧肌(VL),小腿的半腱半膜肌(SM)、腓肠肌内侧(GM)和腓肠肌外侧(GL)。因此,本文将主要肌肉研究对象集中于这6块腿部肌肉。
通过正则化RBF网络对实验测得的操纵者肌肉生理信号特征参数和主观舒适度评分构成的样本进行学习和训练。由于篇幅所限,省略具体评价过程,表1、表2所示为实验获得的不同的汽车踏板操纵过程中基于肌肉生理肌电信号的综合舒适度评价值。以表1作为操纵舒适性建模训练数据,以表2作为离合踏板操纵舒适性实验数据。
以肌肉生理信号参数特征值为模糊神经网络的输入变量;以人机交互过程中,汽车踏板主观操纵舒适性评价值作为输出变量。训练样本过程中,设定最大训练误差为0.001,网络学习率为0.4,训练次数为30。为了检验正则化径向神经网络训练得到的系统性能的好坏,通过MATLAB编程得到系统评价与主观评价的比较结果与模糊神经网络的训练误差,如图3、图4所示。模糊神经网络测试结果见表3。
建模精度为
(10)
式中,Ip为测试数据中第p个人机交互过程汽车踏板操纵舒适性实测值;dp为测试数据中第p个由所建模型获得的人机交互过程汽车踏板操纵舒适性预测值。
本文将各数据预测精度的平均值作为模型建模精度。由于正则化RBF网络模型的精度取决于建模训练的数据,因此训练数据的正确性和覆盖的范围对模型精度产生直接的影响。

表1 舒适性评价建模的训练数据

表2 舒适性评价测试的实验数据
5 结语
从操纵者人机交互过程中肌肉生理信号角度出发,运用主观评价和正则化RBF网络建立了操纵舒适性评价方法,将主观评价和正则化RBF网络有机地结合起来,应用到典型人机交互过程汽车踏板操纵舒适性评价中。通过正则化RBF网络对提取的肌肉生理信号特征参数和相应的主观评价参数构成的样本量进行学习和训练,建立了人机交互过程汽车踏板操纵舒适性评价系统,克服了主观评价的随意性。基于正则化RBF网络建立了肌肉生理信号特征参数与操纵舒适性主观评价之间的映射模型,经测试,该模型能够较为准确地测评人机交互过程踏板操纵舒适性。
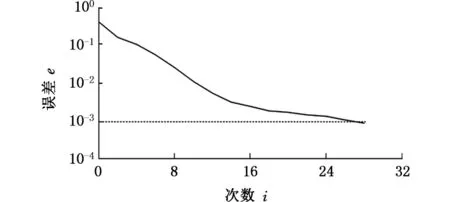
图3 舒适性评价神经网络样本训练误差Fig.3 Error figure of training samples using comfort evaluation neural network

图4 操纵舒适性评价神经网络输出结果Fig.4 Output graph using comfort evaluation neural network

序号实际值预测值绝对误差相对误差15.385.230.070.01326.396.650.350.05235.455.690.290.05146.676.380.220.03456.025.850.150.02666.566.880.380.05576.045.910.190.03286.486.450.050.00796.096.420.320.050106.326.060.240.039116.125.930.270.046126.296.460.160.025
[1] 刘明周,扈静,李也倜,等.实体产品操纵舒适性定量测评研究[J].农业机械学报,2010,41(12):205-209.
LIU Mingzhou,HU Jing,LI Yeti,et al. Quantitative Measurement and Evaluation of Entity Product Handling Comfort[J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):205-209.
[2] KUMAR A,BHASKAR G,SINGH J K.Assessment of Controls Layout of Indian Tractors[J].Applied Ergonomics,2009,40(1):91-102.
[3] 刘明周,张淼,扈静,等.基于操纵力感知场的人机系统操纵舒适性度量方法研究[J].机械工程学报,2016,52(12):192-198.
LIU Mingzhou,ZHANG Miao,HU Jing,et al.Research on the Method of Measuring the Handling Comfort of the Man-machine System Based on the Perception Field of Operating Forces[J]. Journal of Mechanical Engineering,2016,52(28): 192-198.
[4] COOK P A.Stable Control of Vehicle Convoys for Safety and Comfort[J].IEEE Transactions on Automatic Control,2007,52(3):526-531.
[5] FINNERAN A,O’SULLIVAN L.Force,Posture and Repetition Induced Discomfort as a Mediator in Self-paced Cycle Time[J].International Journal of Industrial Ergonomics,2010,40(3):257-266.
[6] BLANCHARD R A,MYERS A M.Examination of Driving Comfort and Self-regulatory Practices in Older Adults Using In-vehicle Devices to Assess Natural Driving Patterns[J].Accident, Analysis and Prevention,2010,42(4):1213-9.
[7] WANG X,BRETON-GADEGBEKU B L,BOUZON L. Biomechanical Evaluation of the Comfort of Automobile Clutch Pedal Operation[J]. International Journal of Industrial Ergonomics,2004,34(3):209-221.
[8] 宗长富,麦莉,王德平,等.基于驾驶模拟器的驾驶员所偏好的转向盘力矩特性研究[J].中国机械工程,2007,18(8):1001-1005.
ZONG Changfu,MAI Li,WANG Deping,et al.Study on Steering Effort Preference of Drivers Based on Driving Simulator[J].China Mechanical Engineering,2007,18(8):1001-1005.
[9] 刘明周,张淼,扈静,等.汽车换挡杆操纵力反馈舒适度测评方法[J].中国机械工程,2016,27(15):2100-2106.
LIU Mingzhou,ZHANG Miao,HU Jing,et al.Evaluation Method of Handling Force Feedback Comfort of Vehicle Gear Lever [J].China Mechanical Engineering,2016,27(15):2100-2106.
[10] 刘明周,阿地兰木·斯塔洪,扈静,等.基于模糊神经网络的汽车变速杆操纵舒适性评价[J].中国机械工程,2016,27(17):2402-2407.
LIU Mingzhou,ADILANMU Sitahong,HU Jing,et al. Evaluation Method for Handling Comfort of Vehicle Gear Shift Lever Based on Fuzzy Neural Network[J].China Mechanical Engineering,2016,27(17):2402-2407.
[11] 张昕,施国标,林逸.电动助力转向的转向感觉客观综合评价[J].机械工程学报,2009,45(6):171-175.
ZHANG Xin,SHI Guobiao,LIN Yi.Objective Evaluation of Electric Power Steering Feel[J]. Journal of Mechanical Engineering,2009,45(6):171-175.
[12] 张鄂,毕朝瑞,王冠华,等.动态驾驶环境所致人体肌肉疲劳的生物信号实验研究[J].工程设计学报,2010,17(4):246-252.
ZHANG E, BI Chaorui, WANG Guanhua et al. Experimental Research on Biological Signal of Muscle Fatigue under Dynamic Driving Environment[J]. Journal of Engineering Design,2010,17(4):246-252.
[13] GRUJICIC M,PANDURANGAN B,XIE X,et al. Musculoskeletal Computational Analysis of the Influence of Car-seat Design/Adjustments on Long-distance Driving Fatigue[J]. International Journal of Industrial Ergonomics,2010,40(3):345-355.
[14] LIU Y H,RYOUHEI H,TAKAHIRO M,et al.Function of Shoulder Muscles of Driver in Vehicle Steering Maneuver[J].Science China Technological Sciences,2012,55(12):3445-3454.
[15] KUIJT-EVERS L F M,VINK P,LOOZE M P D.Comfort Predictors for Different Kinds of Hand Tools: Differences and Similarities[J].International Journal of Industrial Ergonomics,2007,37(1) :73-84.