多无人机三维群集算法的适用性研究与改进
2018-02-05,,,
,,,
(北京航天自动控制研究所,北京 100854 )
0 引言
现代战争中,无人机因其无伤亡、作战准备时间短、高过载、效费比高等特点扮演着越来越重要的角色[1]。而随着作战环境复杂化、作战任务多样化,无人机群协同作战相对于单个无人机具有灵活、高效、可靠的优势。无人机群的协同控制成为新兴的研究热点,而群体智能的控制思想是其中重要的研究方向,具有突出的优点。
自然界中,鱼群、鸟群、蚁群等在其迁徙、觅食过程中,常常自发形成遵循一定的运动规则的团体,如以几乎相同角速度集体活动的鱼群、自发形成“一”字或“人”字的大雁群等。从自然界的群体“涌现”现象出发,研究者提出了群体智能的概念,即单个的简单个体通过执行简单的、反应式的指令,最终形成的整个群体在完成复杂任务时所表现出的智能。
多智能体系统是由分布配置的大量自主或半自主的智能体(Agent)通过网络相互联系所构成的系统,各成员之间通过竞争和磋商等手段完成共同的任务[2]。Irene Giardina[3]等从生物学角度对群集运动进行了研究。Saber在Reynolds模型的三条群集规则基础上,提出了一种具有避障效果的控制策略,并分析验证了群集系统的稳定性,提出了平滑的人工势场函数构造方法[4],和基于单个虚拟领航智能体的群集算法[5]。Su采用一致性策略设计和分析了群集算法[6-7]。国内学者也进行了相关研究[8-10]。
已有的研究大多对无人机群集运动进行了简化,忽略其在高度上的位置变化,主要研究其在二维平面内的运动。本文所使用的群集运动机制主要来自于对欧椋鸟群的模仿,其对二维平面运动的有效性已经得到了验证,而对三维情况下的运动是否适用还有待研究。因此,本文就智能群集算法是否适用于三维群集运动进行了仿真和分析。
1 智能群集算法
最早诞生的有影响力的群集控制要素由Reynolds[11]提出,他阐述了多智能体群集的控制和交互连接理论。Reynolds提出被称为局部行为规则的Boids模型,在这个模型中多智能体被模拟为真实自然世界的群集。
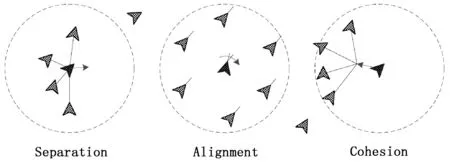
图1 Reynolds规则示意图
Reynolds提出了群集运动的3个规则,分别是聚集、避碰、速度协同,如图 1。将这三条规则分别用相当于速度更新的3个因子表示出来,分别命名为群体聚集因子νcohesion,群体避碰因子νseparation和群体速度协同因子νalign,并分别对值进行了标准化处理。
1.1 群体聚集因子
根据Reynolds的群体聚集规则,每个群集个体有与邻域内其它群集个体靠近的趋势。设定每个个体向邻域内其它个体的平均质心靠近。根据这种个体行为模式的物理意义,我们按下式定义群体聚集因子:

式中,Dvis是个体的邻居集半径;Ni是个体邻居集内个体数目;Pi是个体i的位置矢量;Pj是个体i的第j个个体的位置矢量。
1.2 群体避碰因子
Reynolds规则中第二条即是避碰规则。为使无人机个体之间保持安全距离Dmin,还需要有群体避碰因子的作用。给出群体避碰因子的表达式如下:


式中,Dmin是两无人机个体的最短安全距离;Ni,min是个体i的邻居集中与个体i距离小于Dmin的个体集合;Nmin是位于个体i安全距离内的个体总数;α为将群体避碰因子进行非线性处理所添加的常数因子。ν′将安全距离内的无人机个体对个体i产生的远离向量进行矢量叠加,得到矢量和,再除以Dmin和Nmin进行标准化。距离越近的个体对ν′影响越大。
1.3 群体速度协同因子
第三条群集运动规则是速度协同一致的规则。为使群集个体最终速度达到一致性,可以令每个无人机个体速度向着它的临近空间内所有无人机个体的平均速度进行更新改变。可以将表达式写成如下所示:

在上式中,Nvis是无人机个体i可视距离内无人机数,即临近个体数。Ni,vis代表位于第i个无人机个体可视范围内的所有其它无人机个体集合。νaligni的直观物理意义是个体i周围所有临近个体的速度矢量的平均值,并将群体速度协同因子的长度规范化。
1.4 个体速度更新
综合聚集因子νcohesion,避碰因子νseparation,速度协同因子νalign,可以定义个体i的速度更新值νinew:
νinew=wcohesion·νcohesion+wseparation·νseparation+walign·νalign
式中,wcohesion、wseparation、walign是各因子权重系数,且wcohesion+wseparation+walign=1。
每个无人机个体的速度和位置随时间周期t的更新方程如下:
V(t+1)=w·V(t)+Vnew(t)
P(t+1)=P(t)+V(t)
w模拟了摩擦力等阻力导致无人机个体速度减小的趋势。
以上是对三维情况下智能群集控制律的说明。
2 人工势场算法
1986年, Khalib首次提出人工势场法[12]。依据物理学中保守力势场的特点,人工虚设一个势能函数,赋予障碍物和被控无人机个体在势场中的势能和相互作用的保守力。
为满足群集间距控制要求,需要选取合适的势能函数表达式,对其求导获得相互作用力表达式,并认为在视距范围内的无人机个体之间存在这种相互作用力,使其能满足个体间距离小于平衡距离时互斥,间距大于平衡距离时互相吸引。平衡距离处相互作用力为0,同时也是势能最低点,每个无人机个体都倾向于稳定在群集势能最低处。
所需要的势能、作用力随距离非线性变化的特性和分子间引力势场非常类似,可以借鉴分子间引力的表达式,写出无人机群集中个体的控制规律。
本文中定义人工势场函数Vij是第i,j个运动体相互距离dij的函数,且满足全部下述条件:
1)Vij≥0;

3)Vij(dij)在区间(Dmin,+∞)上只有唯一的极小值Vij(D);
4)当dij→R-时,Vij(dij)严格单调递增,当dij≥R时,Vij(dij)是常值。
选取一个符合上述要求的人工势场函数定义式如下:
对式求导即可以得到作用力方程:

据此,第j号无人机势场对第i号无人机速度更新产生的影响:

无人机个体i的总速度更新是视距范围内所受势场力带来的速度更新矢量叠加:
Vi(t+1)=w·Vi(t)+Vinew(t)
w为速度衰减因数。
以上是对三维情况下人工势场控制律的说明。
3 仿真分析与改进
为通过仿真研究智能群集算法对三维运动的适用性,现建立如下仿真环境:
在一定空间范围内随机地初始分布有N=20个无人机个体。考虑到无人机有一定的巡航高度,且群集个体间高度相差过大对聚集条件要求过于苛刻,因此我们假设无人机分布于一个椭球空间,3个轴半径分别为R,R,0.8*R。采用Z轴竖直指向上方,XOY坐标平面水平的左手坐标系,即对第i个体初始位置坐标有:


每个无人机个体具有水平向最大速度VXYmax,竖直向最大正向速度VZpmax,竖直向最大负向速度VZnmax,水平最大加速度aXYmax,竖直向最大加速度aZmax。考虑到无人机个体一般竖直向速度、加速度均应当小于水平向速度、加速度,且无人机下降速度应小于上升速度,所以一般设定仿真值时应有|VZnmax|<|VZpmax|<|VXYmax|,|aZmax|<|aXYmax|。无人机初始水平速度、竖直速度大小分别为VXY0、VZ0,速度方向随机。
此外,考虑三维群集中无人机个体不能获得全局信息交流的情况。假设每架无人机能与可视距离Dvis内的其它无人机个体进行有效信息交流,能够获取其坐标、速度信息。设定无人机个体之间的最小安全距离为Dmin,以避免碰撞情况。
3.1 智能算法控制律
3.1.1 仿真条件
首先对智能算法在三维群集中的适用性进行研究。仿真中的常值条件如表1,分组仿真的不同条件如表2。

表1 仿真中的常值条件

表2 分组仿真
3.1.2 仿真结果
首先以第一组条件下的仿真为基准,然后改变不同的参数值与之对比。在第一组仿真条件下,给出有代表性结果图 2。其中左图为无人机群体在空间范围初始分布,右图为M个时间周期后的终态分布。仿真中,经过一段时间迭代后,无人机群形成一个或多个稳定集团,保持相同速度、固定的相对位置匀速运动。图3为各无人机个体的坐标和速度变化折线图。可以看出,位移、速度均收敛,达到了聚集、速度协同的效果。

图2 第一组条件下始末位置

图3 第一组条件下位移与速度变化
在仿真中,采用控制变量,分别改变可视距离Dvis,无人机群初始分布空间半径R,最大加速度限制aXYmax、aZmax四个参数值进行多组仿真对比。经过多组仿真,在随机初始分布,随机初始速度条件下,增大Dvis对群体聚集有最大帮助,有利于群体快速聚集、调整速度以及使最终群集聚集为尽量少的集团。减小初始分布空间半径R相当于增大可视距离Dvis。而增大加速度限制aXYmax、aZmax能有效提高群集聚集和队形调整速度,但对最终能聚集为多个还是一个集团影响较小。但所给出的除初始分布空间半径R极小条件组,任意其它一组条件下都不能使群集100%完成聚集。总的来说,智能算法对三维空间群集控制有一定效果,但所需要的初始条件和限制比较苛刻,要求的条件远比二维情况多和复杂。
3.2 人工势场算法控制律
3.2.1 仿真条件
进行人工势场算法控制律的仿真时,除表 1表 2 外,还需补充表 3的常值条件,并按照表 4进行分组仿真。

表3 补充常值条件

表4 分组仿真
3.2.2 仿真结果
第1组仿真中无人机群体均能实现较好的均匀分散,且速度较快,优于前述智能算法的分散效果,如一组典型结果图 4、图 5。从算法上分析,人工势场算法在相互距离小于平衡距离时其加速度与距离的关系呈指数变化,而智能算法是始终呈线性比例变化,在距离更接近的时候人工势场算法效果更好。

图4 第一组条件始末位置

图5 第一组条件位移与速度变化
第2组条件,多次仿真中完成了一定的聚集,但聚集效果没有智能算法明显,一般聚集成数个小集团,速度也比较慢。典型结果如图 6图 7。

图6 第二组条件始末位置

图7 第二组条件位移与速度变化
3.3 两种算法的对比与改进
注意到智能算法的动态特性更好,人工势场算法的抖振更多。同时在密集个体分离的仿真过程中,人工势场算法下速度远远快于智能算法。绘出了两种算法下个体间相互作用力随距离变化的对比,如图 8。智能算法的控制力均随距离D呈线性变化,而人工势场算法为非线性变化,在D

图8 智能算法与人工势场算法的对比
因此,通过对人工势场算法进行改进,添加前述智能算法中的群体聚集因子,以改善远距离聚集效果。近距离通过人工势场算法避障,远距离通过智能算法完成群体聚集,得到改进的人工势场算法,见式,是避障和聚集收敛更快、群集个体分布更优的新的群集控制算法。
νinew=wcohesion·νcohesion+wapf·νapf+walign·νalign
其中,
4 小结
本文将智能算法和人工势场算法用于三维无人机群集控制仿真,验证了两种算法在三维群集中具有一定的适用性,但是所需的初始条件比较苛刻,而智能算法的动态特性更好,节省控制能量。同时注意到智能算法用于聚集效率更高,而人工势场算法用于避碰效果更好。将二者结合所得的新算法具有更高的群集控制效率、更好的控制效果。
[1]段海滨, 刘森琪. 空中/地面机器人异构协同技术研究: 现状和展望[J]. SCIENTIA SINICA Technologica, 2010, 40(9): 1029-1036.
[2]赵园园. 带时滞的多智能体系统的有限时间一致性[D]. 天津:天津大学, 2012.
[3]Giardina I. Collective behavior in animal groups: theoretical models and empirical studies[J]. HFSP journal, 2008, 2(4): 205-219.
[4]Olfati-Saber R, Murray R M. Distributed cooperative control of multiple vehicle formations using structural potential functions[J]. IFAC Proceedings Volumes, 2002, 35(1): 495-500.
[5]Olfati-Saber R. Flocking for multi-agent dynamic systems: Algorithms and theory[J]. IEEE Transactions on automatic control, 2006, 51(3): 401-420.
[6]Su H, Wang X, Yang W. Flocking in multi‐agent systems with multiple virtual leaders[J]. Asian Journal of control, 2008, 10(2): 238-245.
[7]Su H, Wang X, Lin Z. Flocking of multi-agents with a virtual leader[J]. IEEE Transactions on Automatic Control, 2009, 54(2): 293-307.
[8]俞 辉, 王永骥, 刘 磊. 基于动态拓扑有领航者的智能群体群集运动控制[J]. 系统工程与电子技术, 2006, 28(11): 1721-1724.
[9]王冬梅. 群集运动控制及其相关特性的研究[D]. 武汉: 华中科技大学, 2009.
[10]李宗刚, 张通州, 谢广明. 一类异构线性多智能体系统最优输出跟踪的分析与控制[J]. 系统科学与数学, 2015 (7): 766-778.
[11]Reynolds C W. Flocks, herds and schools: A distributed behavioral model[J]. ACM SIGGRAPH computer graphics, 1987, 21(4): 25-34.
[12]Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. The international journal of robotics research, 1986, 5(1): 90-98.