低空反无人机技术现状与发展趋势
2018-02-03张静张科王靖宇吕梅柏王佩
张静,张科,王靖宇,吕梅柏,王佩
(1.西北工业大学 电子信息学院,西安 710072) (2.西北工业大学 航天学院,西安 710072)
0 引 言
近年来,随着信息、控制、通讯等领域技术的不断发展成熟,使得无人机具有成本低、体积小、重量轻、易操纵、灵活性好、适应性强、稳定性高等优点[1-2],带动了无人机产业的整体飞速发展,促使消费级和工业级无人机的使用门槛逐渐降低,在民用及军事领域都得到了广泛应用[3]。
然而,虽然国内从事无人机研发和生产销售的企业超过400家,对消费级无人机操作人员的需求总量超过10万,但由于缺乏统一的行业标准和规范,导致准入门槛较低,多数无人机的操控飞行都处于“黑飞”状态,给各行各业带来便利的同时,却使公共安全甚至国家安全受到了严重威胁。非合作无人机入侵飞行的主要威胁可以分为五个方面:威胁国家安全[4-5]、威胁重要目标安全[6]、威胁空中飞行安全[7]、威胁公共安全、侵犯公民隐私。从无人机的飞行意图是否受人为因素影响的角度来讲,还可将低空无人机所带来的安全威胁来源大致分为两类:
(1) 被动非合作。对于被动非合作无人机而言,其安全威胁来源主要是由通信失败而导致的操作失控。无人机系统主要由无人平台、任务载荷、测控通信系统、地面指挥控制等部分构成。其中测控通信系统是实现人机结合的关键,也是无人机飞控安全性的最大保障[8]。测控通信系统主要依靠数据链路传输信息来完成对无人机的遥控、跟踪定位和信息传输[9],若数据链路中断,则会造成无人机操作失控,导致其飞行轨迹发生不可预测的变化,成为被动非合作目标。该类型目标失控后,其后果严重者一般为硬着陆,不仅可能导致机身损毁,还有很大概率会对地面人员和设施造成安全危害。
同时,随着无人机应用范围的拓展,无人机数量几乎呈爆炸式增长态势,这会导致同一空域内同一飞行空间中的无人机数量过多,极其容易使无人机对各自的飞行产生影响,例如发生空中相撞等[10];更为严重的是,会对空域内其他飞行器产生安全威胁,例如民航班机等。
(2) 主动非合作。相较于被动非合作式的低空无人机,主动非合作目标是指操作人员有意识地利用无人机进行飞行入侵任务,受操作人员主观意识的影响,主动非合作的无人机会对公共安全和国防安全造成更大的危害[11]。例如,2016年3月,在阿塞拜疆和亚美尼亚爆发的战争中首次出现了“自杀式无人机”,阿塞拜疆空军将无人机作为先头部队执行爆炸任务袭击目标,而不是直接发射导弹[12],亚美尼亚国防部称,无人机攻击了一辆搭载亚美尼亚志愿军的大巴,造成7人死亡[13]。
随着无人机在军民用领域的快速推广与应用,加大对无人机使用的法律法规监管、加快无人机反制技术的研发已迫在眉睫。本文主要从技术层面对现有反无人机系统的原理和特点进行阐述与分析,并结合针对“低、慢、小”目标的探测与防护技术的最新进展,对低空反无人机系统的未来发展趋势进行分析与讨论。
1 国内外反无人机技术发展现状
2016年2月,美国Markets & Markets咨询公司发布针对反无人机系统的市场分析报告指出,未来五年内(2017~2022)全球反无人机市场将呈现快速增长,预期年复合增长率接近24%,到2023年将达到近12亿美元。同时,报告还强调亚太地区将会是反无人机系统需求增长最快的地区,预测该地区市场上的反无人机系统将供不应求,反映出反无人机技术的强大内在发展动力。
而目前,世界各国在执行反无人机任务时大多是将低空入侵的无人机视为特殊飞行目标来对待,普遍采用传统防空武器系统,以确保打击和防护效果的有效性。但是,世界各大国仍在大力开展利用电子战、网络战、无人机、激光武器等技术执行反无人机任务的研究工作[14]。虽然传统防空武器系统是最常用的反无人机武器,但传统武器打击手段对于微小型无人机目标而言是一种过度杀伤,属于典型的“大炮打蚊子”战术,导致巨大的成本不对称问题。特别是当入侵无人机为蜂群式无人机编队时,由于目标探测与识别难度较高,留给作战人员及系统的反应时间极短,导致防护效能显著降低。同时,现有防空武器系统的打击目标在设计之初并不是针对无人机目标的,因此也无法抵御小型、廉价无人机集群的飞行入侵[15]。
1.1 反无人机技术体系的一般组成
目前,主流反无人机技术体系主要由探测跟踪和预警技术、毁伤技术、干扰技术、伪装欺骗技术等部分组成[16-17],主要基于以下考虑:在实施反无人机作战时,首先要对无人机进行探测跟踪和预警,然后根据实际情况,选择对无人机实施火力打击的硬毁伤或者是对其进行干扰失效的软毁伤[18]。对于部分特殊目标,还要采取积极主动的伪装防护方法和手段,降低对方无人机的侦察效率和效果。在现有技术方案中,既有主动式反无人机手段,也有被动式伪装防护手段,而为了使反无人机作战效能最优化,现阶段常采用主动与被动方式相结合的反无人机技术方案。通常,现有反无人机系统各部分的具体技术组成如下。
(1) 探测跟踪和预警技术。主要包括地面目视侦察技术、雷达探测跟踪技术、空中预警技术和卫星侦察技术等,运用了这些技术的地面目视侦察装备、雷达、空中预警飞机和卫星组成地面-空中侦察网[19],对无人机实现探测跟踪和预警,为后续的反无人机作战行动提供信息情报支援。
(2) 毁伤技术。主要包括反无人机导弹技术、激光武器技术、微波武器技术、格斗型无人机技术和常规火力毁伤技术等,运用这些技术的反无人机武器装备组成地面-空中火力打击网,依据侦察情报系统提供的情报信息,采取适当措施,采取合理的战术战法,对无人机实时实施火力摧毁[20]。
(3) 干扰技术。主要包括光电对抗技术、控制信息干扰技术和数据链干扰技术等,运用这些技术的反无人机武器装备对无人机实施有效干扰,使无人机的自动控制系统、通信系统、动力系统等失效,从而降低甚至丧失其主要作战功能。
(4) 伪装欺骗技术。主要包括光学、热红、声学和电子伪装欺骗技术等,在反无人机作战过程中,通过对己方目标进行适当伪装,降低对方无人机的侦察监视效率和效果,从而降低对方无人机的作战效能。
1.2 反无人机系统的分类及技术现状
根据所采用的技术路线不同,世界各国现有的反无人机系统类型各异,但主要技术方案有声波干扰、电磁信号干扰、黑客技术、激光打击、无人机捕手等,各种手段的特点和效果也各不相同。但是,根据不同干扰及压制技术的形式不同,现有反无人机系统总体上可以分为干扰阻断、毁伤抓捕和监测控制三大类。
(1) 干扰阻断类反无人机系统:以美国Battelle公司的DroneDefender反无人机枪和欧洲空客公司的Counter UAV电子反无人机系统为代表,如图1所示,其主要工作原理是向目标无人机发射定向大功率干扰射频信号,从而切断无人机与遥控器之间的通讯链路,迫使其自行降落或者受控返航。另一方面,由于绝大部分无人机的飞行控制均采用GPS卫星导航系统与惯性导航系统相结合的方式[21],该类系统也可以只干扰无人机的GPS信号接收机,导致无人机只能依靠基于陀螺仪的惯性导航系统,从而失去作业精度。同时,由于无人机对电磁干扰十分敏感,电磁脉冲、高功率微波都能够使无防护的无人机电子元件暂时失效或导致半导体元件烧毁,可以让无人机航电计算机中的存储器丧失记忆能力,使无人机陷于瘫痪甚至坠机。

(a) 美国DroneDefender反无人机枪

(b) 欧洲空客公司Counter UAV电子反无人机系统图1 典型的干扰阻断式反无人机系统Fig.1 Typical jamming blockage anti-drone system
由于电子干扰类系统的技术门槛和成本相对较低,国内市场上的大部分反无人机系统均是基于此类系统研发而来。典型的便携式反无人机干扰系统如表1所示。
需要注意的是,一方面,随着电子技术的发展,无人机的抗电子干扰能力也在相应地增强;另一方面,普通的信号干扰仅能使无人机的飞行作业失败,但对于受干扰后无人机的后续运动趋势难以进行推断,导致无法满足安全防范的预期。
(2) 毁伤抓捕类反无人机系统:以美国波音公司的高能激光移动展示系统(High Energy Laser Mobile Demonstrator,简称HELMD)、中国工程物理研究院的“低空卫士”反无人机激光防御系统、英国OpenWorks公司的SkyWall 100系统和荷兰Delft Dynamics公司的无人机捕手为代表,如图2所示,主要是通过采用激光武器、地空导弹、攻击型无人机等多种打击手段,直接拦截、摧毁或捕获地空无人机,实现对非合作无人机目标的防护与压制。
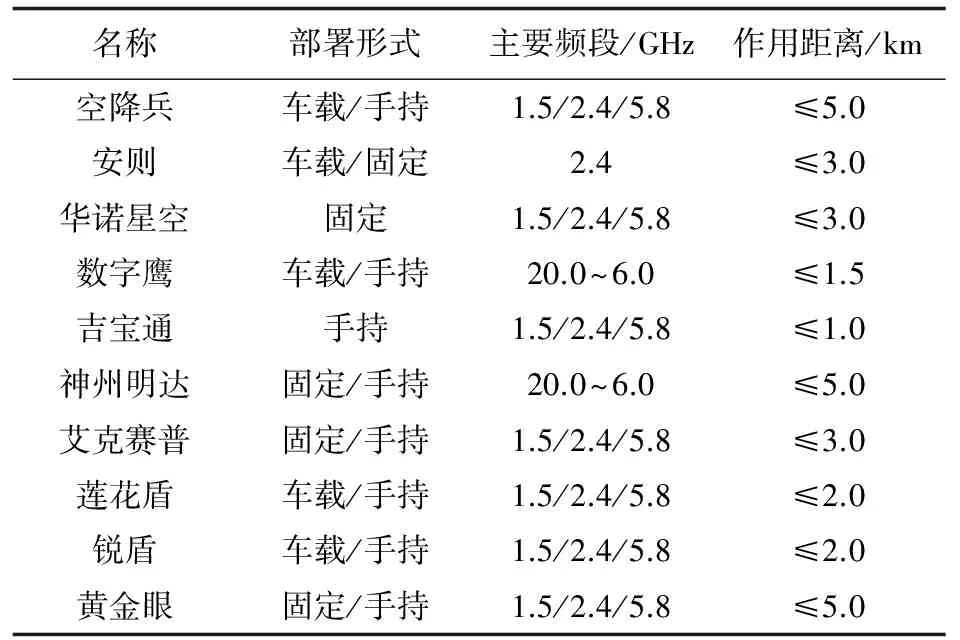
表1 国内现有电子干扰式反无人机系统Table 1 Typical electronic interference anti-drone system in current chinese market

(a) HELMD系统

(b) “低空卫士”系统

(c) SkyWall 100系统
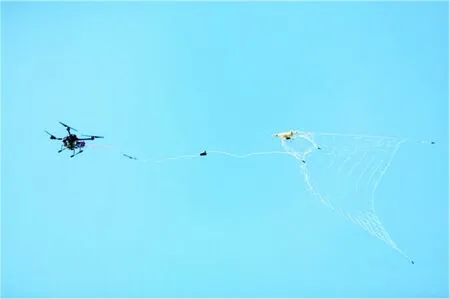
(d) 无人机捕手图2 典型的毁伤抓捕式反无人机系统Fig.2 Typical destroy and capture anti-drone system
目前,普遍采用基于激光武器的反无人机系统[22],其主要特点为:一是反应时间短、照射速度快、命中精度高。激光武器的照射速度极快,无须计算提前量,因而命中率极高;二是辐射强度高,摧毁威力大。常规武器是依靠高速飞行的弹丸破片的撞击或高速、高温、高压金属射流的侵蚀作用来击毁飞机、舰艇和坦克的,而激光武器则靠强激光照射,通过烧蚀、气化武器装备的外壳来造成人员伤亡或电路故障;三是无污染,不易受电子干扰,属于比较干净的新杀伤机理武器。其他的打击方式还有基于导弹等常规打击兵器的反无人机系统[23]。
目前该类系统受所使用的打击手段限制,一般侧重应用于军事领域,并有希望成为未来无人战场环境中的重要角色,国外其他同类产品如表2所示。

表2 其他国外毁伤抓捕式反无人机系统Table 2 Other typical destroy and capture anti-drone system in current abroad market
(3) 监测控制类反无人机系统:对于前两类系统来说,除了系统构成较为复杂外,还需要额外的资源实施打击。同时,无论是干扰阻断还是直接摧毁,都容易造成无人机的坠机并带来额外的影响。为了避免发生上述情况,监测控制类反无人机系统利用光电、雷达等手段对有效范围内的空域进行实时监控,借助阻截无人机使用的传输代码,控制无人机,甚至引导其返航[24]。
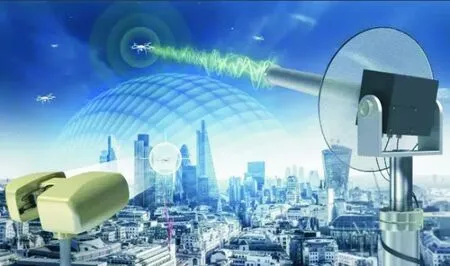
该类系统以英国Blighter公司的AUDS系统、Selex ES公司的Falcon Shield系统,美国黑睿技术公司的UAVX系统和以色列Rafael Advanced Defense Systems公司的Drone Dome系统为代表,如图3所示,是结合电子侦测、光电探测等设备开发而来,具备较高的机动性和集成度,可采用多模式探测信息对无人机目标检测、识别和跟踪,并实施干扰或摧毁,是一种较为高效和先进的反无人机系统,在军用和民用领域都有广阔的发展潜力。

(a) AUDS系统
(b) Falcon Shield系统

(c) UAVX系统

(d) Drone Dome系统图3 典型的监测控制式反无人机系统Fig.3 Typical detection and control anti-drone system
此外,还有部分系统采用声波、红外等探测信息来实现对低空无人机目标的监测,并结合无线电诱骗技术来实现对入侵无人机的驱离,从而达到防护目的。国内外监测控制类反无人机系统的其他部分典型产品如表3所示。
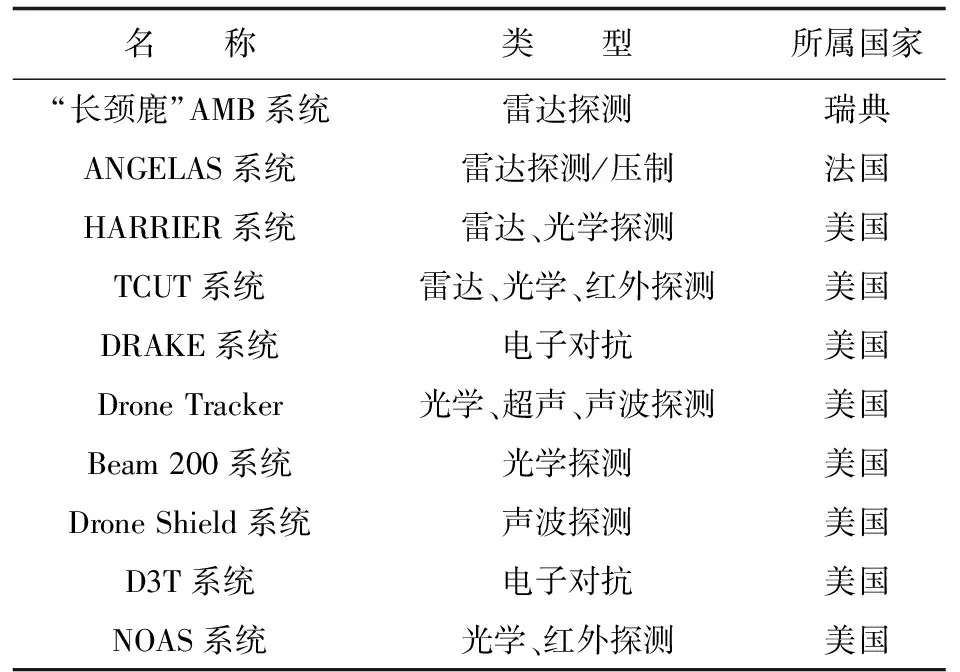
表3 其他监测控制式反无人机系统Table 3 Other detection and control anti-drone system
2 现有低空反无人机系统的问题及发展趋势
通过对国内外现有反无人机系统的分析可以看出,虽然现有技术已被用于实际的反无人机作战之中,并发挥了各自的优势,但不同类型反无人机系统的缺点及局限性也较为突出。
第一,干扰阻断类反无人机系统虽然操作简单、成本较低,且部分系统便于携带,但其主要采用电磁干扰手段,对环境要求相对较高,在城市或居民密集区域使用容易对无线电信号的正常使用环境造成不良影响。特别地,对于存在爆炸物等涉及恐怖活动的非合作无人机防护而言,其发生风险的系数相对较高。
第二,直接摧毁类反无人机系统虽然打击效果好,适用于电磁环境复杂且易受干扰的环境,防护作战的风险指数极低,但其缺点也十分突出,即系统价格相对昂贵且配套系统较为复杂。在实际使用时,由于激光等摧毁方式为直接火力打击,作战时普遍不考虑无人机残骸对地面的次生安全危害,不适用于民用领域。此外,对于警方等执法机关而言,该类系统会对打击目标造成永久性损毁,导致获取所需情报数据的可能性也大幅降低,不利于后续执法工作的调查取证。
第三,监测控制类反无人机系统虽然能够在对无人机目标进行检测、识别、跟踪的基础上,利用电磁干扰、无线电控制等手段实现对无人机的反制与防护,但该类系统的局限性也较大,主要体现在:对不依靠外部通讯进行飞行控制的无人机,压制效果较差,即如果非合作无人机为自杀式无人攻击机或具有自主智能控制功能,可以不依赖人类操作员的远程控制,则该类系统无法进行有效的压制。
综上所述,现有国内外市场上的主流反无人机系统均只能在单一或某些特定环境下具备低空反无人机任务所需要的功能,因此具有不同程度的局限性。目前,而能够全面有效进行非合作无人机防护与压制的全要素反无人机系统尚未投入到实际应用当中。
近年来,针对以无人机为代表的“低、慢、小”目标的探测与防护问题,研究人员围绕其关键技术开展了大量方法研究和工程实践,在低空弱小目标探测感知、无人机防护与压制等方面取得了一系列研究成果。结合低空目标探测与防护技术的最新研究进展,本文主要从以下三个方面分析未来低空反无人机技术的发展趋势。
2.1 察打一体化反无人机系统
现有的干扰类和直接摧毁类反无人机系统均着眼于已发现的无人机目标,工作过程需要人为操控或干预。而监测控制类反无人机系统虽然可及时发现无人机目标并对其进行定位,但无法对目标进行有效的拦截和打击。目前,已有部分反无人机系统采用探测和打击相结合的方式,利用检测类系统对目标进行定位,再利用干扰或摧毁类系统对其进行拦截,这种方式虽可以实现自动拦截,但需要两套系统和额外的信息交换系统配合,具有体积大、实时性差、不便于部署等诸多问题。
随着无人机探测和防护技术的不断成熟,各子系统设备将逐渐小型化,并最终融合为察打一体式反无人机系统,同时兼具监控和打击能力,可直接部署,独立完成从发现到拦截无人机。由于察打一体化系统的集成度更高,使硬件和软件的控制更加高效,从而提高其实时性和精确性。同时,由于不需要控制人员的介入,可以大量部署以覆盖更大的区域,将是未来反无人机系统技术发展的重要方向。
2.2 基于人工智能的低空目标探测技术
近年来,研究人员对基于可见光图像的视频运动目标分析与人工智能识别技术展开了大量的理论和方法研究。在运动目标探测方面,现有研究主要采用了帧间差分法[25]、背景建模法[26]、运动目标建模法[27-28]等来实现对运动目标的检测。而受到基于深度学习的人工智能算法带动,现有视觉目标识别技术正逐步向人工智能识别技术方面发展。例如,Zhu Y等[29]研究了行车监控视频中弱小交通标示的识别问题,通过采用基于深度神经网络的识别模型,在很大程度上提高了弱小运动目标的变尺度识别问题,并取得了较高的识别精度和抗干扰能力,提高了识别模型的鲁棒性。
由于低空无人机目标是较为典型的“低、慢、小”运动目标,在运动过程中也具有变尺度特性,更需要在识别时将其与飞鸟、风筝、气球等其他干扰物体进行有效区分。同时,基于执法取证和安全防护的需要,现阶段对无人机目标的甄别仍多依赖于光学成像手段,因此基于光电探测信息的无人机探测与识别技术是未来低空反无人机技术的核心关键技术,而基于人工智能的低空目标探测技术能够有效提供关于低空无人机的方位、尺寸、类型等信息,将是未来低空目标探测感知技术的核心。
2.3 低空目标新型防护技术
(1) 电子围栏技术
对于部分需要隐蔽的高价值目标或敏感区域而言,反无人机系统无法利用雷达等主动探测系统进行远距离无人机目标探测。虽然可以采用光电被动探测手段对无人机进行探测,但由于其作用距离有限,导致进行大范围覆盖时系统的成本急剧上升。因此,针对隐蔽目标和敏感区域的反无人机需求,可采用基于定向电子干扰的电子围栏技术来实现对低空无人机的静默防护,其核心关键技术是利用定向天线进行干扰信号广播,在指定频段上对指定方向、指定距离内的无人机目标进行信号干扰,在实现对无人机导航、遥控、图传信号压制的同时,降低暴露真实目标位置信息的概率,达到保护隐蔽目标和敏感区域的目的。由于该类系统的技术难度较低、成本较小,适合在目标区域边界上进行组网部署,并具有无人值守、灵活性高等优点,是未来反无人机系统发展的重要组成部分。
(2) GPS诱骗技术
早在2011年12月,美军RQ-170“哨兵”无人侦察机在入侵伊朗领空250 km时被伊朗捕获。该事件表明,在切断无人机与地面控制中心的数据联系并迫使其进入自动导航状态后,通过使用转发式诱骗干扰技术,向无人机发送含有错误信息的GPS诱骗信号,可以无需破解无人机远程控制指令与通信信号而使其降落在指定地点。2012年12月,伊朗再次捕获一架美军“扫描鹰”无人侦查机,又一次证明了该诱骗方法的有效性。
因此,当所要保护的目标区域的地理坐标为已知时,非合作无人机可以采用屏蔽外部遥控和图传信号的方式,只凭借导航信号来实现对目标区域的入侵。针对上述反无人机作战的需求,可以采用基于GPS导航信号欺骗的诱骗式反无人机技术。该类系统主要是通过发射欺骗导航信号,实现对非合作无人机导航部件的诱骗阻断。同时,还可以将该技术与区域电磁环境管控系统相结合,通过在发射区域增强导航信号保障授权无人机正常飞行的同时,实现对非合作无人机的驱离与迫降。
(3) 赛博控制技术
现有消费级无人机为了方便用户在移动设备上进行操控,通常会采用WiFi网络和远程开放端口来进行交互,因此可以将无人机视为网络上的设备,使用黑客技术进行入侵控制,即使用赛博(Cyber)空间上的控制技术来实现对入侵无人机的反控制。例如,开发出“萨米蠕虫病毒”的传奇黑客萨米·卡姆卡尔就通过编写“skyjack”无人机劫持软件,并安装到经过特殊配置的无人机中,实现了在空中飞行时对指定WiFi范围内其他无人机的入侵,进而完成了赛博控制并成功取得了目标无人机的控制权。在2015年10月的黑客大赛GeekPwn上,参赛选手成功演示了利用安全漏洞来实现对大疆无人机的无线劫持。虽然受网络加密与WiFi路由信号衰减的影响,该技术的难度较大且存在距离限制,但随着无线通讯技术水平的提升,该技术也将成为未来反无人机系统技术的重要组成。
3 结束语
现有反无人机系统大多仅能从干扰、打击或控制中的某一个方面进行反无人机作战,导致其适用环境、作战距离与可打击目标种类具有较大的作战局限性。在战争态势瞬息万变的情况下,难以有效应对成体系、大批次、多样化的无人机察打一体化作战。与此同时,反无人机系统在特种作战、要地防护和信息对抗等军事领域具有重要的应用价值,其相关关键技术国外进行了严密封锁,是十分敏感的前沿研究领域。因此,亟需对具有自主知识产权的反无人机系统进行深入研究,从系统设计、功能实现和作战效能的角度进行超前设计,实现反无人机系统核心关键技术的创新性突破,从而保障我国军队和执法机关对反无人机作战的战略需求。
[1] 陈开生, 陈卫. 美军无人机发展现状与趋势[C]. 尖兵之翼——2006年无人机大会, 2006: 52-56.
Chen Kaisheng, Chen Wei. The status and trend of U.S. Army UAV development[C]. Commando Wing-China AUVSC Conference, 2006: 52-56.(in Chinese)
[2] 孙成陆. 特种作战中无人机侦察力量的运用[J]. 四川兵工学报, 2011, 32(1): 40-42.
Sun Chenglu. Application of unmanned reconnaissance in special operations[J]. Journal of Sichuan Ordnance, 2011, 32(1): 40-42.(in Chinese)
[3] 张云秀, 曾庆达, 张炜. 无人机发展综述[J]. 河南科技, 2017(9): 58-59.
Zhang Yunxiu, Zeng Qingda, Zhang Wei. Overview of UAV development[J]. Henan Science and Technology, 2017(9): 58-59.(in Chinese)
[4] 张天航, 白金平. 旋翼式无人机的发展和趋势[J]. 人工智能与机器人研究, 2013(2): 16-23.
Zhang Tianhang, Bai Jinping. Development and trend of unmanned rotorcraft[J]. Artificial Intelligence and Robotics Research, 2013(2): 16-23.(in Chinese)
[5] 李增彦, 李小民. 单兵无人机发展现状及关键技术分析[J]. 飞航导弹, 2017(6): 23-29.
Li Zengyan, Li Xiaomin. The analysis of soldier UAV development status and key technology[J]. Aerodynamic Missile Journal, 2017(6): 23-29.(in Chinese)
[6] 何道敬, 杜晓, 乔银荣, 等. 无人机信息安全研究综述[J]. 计算机学报, 2017, 40(125): 1-22.
He Daojing, Du Xiao, Qiao Yinrong, et al. A survey on cyber security of unmanned aerial vehicles[J]. Chinese Journal of Computers, 2017, 40(125): 1-22.(in Chinese)
[7] Pitt J, Perakslis C, Michael K. Drones humanus introduction to the special issue[J]. IEEE Technology & Society Magazine, 2014, 33(2): 38-39.
[8] 吴辉喜, 徐鹏, 陈小春, 等. 基于信息一体化系统的无人机数据链技术应用[J]. 四川兵工学报, 2013, 34(2): 114-116.
Wu Huixi, Xu Peng, Chen Xiaochun, et al. Data link scheme of UAV based on technologies of information integration[J]. Journal of Sichuan Ordnance, 2013, 34(2): 114-116.(in Chinese)
[9] 王芳, 周海瑞, 邵静. 支持网络化应用的无人机CGCS功能体系研讨[J]. 电光与控制, 2014, 21(2): 50-54.
Wang Fang, Zhou Hairui, Shao Jing. Function architecture of UAV CGCS supporting network application[J]. Electronics Optics & Control, 2014, 21(2): 50-54.(in Chinese)
[10] 刘炜, 冯丙文, 翁健. 小型无人机安全研究综述[J]. 网络与信息安全学报, 2016, 2(3): 39-45.
Liu Wei, Feng Bingwen, Weng Jian. Survey on research of mini-drones security[J]. Chinese Journal of Network and Information Security, 2016, 2(3): 39-45.(in Chinese)
[11] 赵晓宏. 国外军用小型无人机发展现状及趋势[J]. 轻兵器, 2017(11): 23-27.
Zhao Xiaohong. The development status and trend of foreign military small UAV[J]. Small Arms, 2017(11): 23-27.(in Chinese)
[12] Hayajneh T, Doomun R, Al-Mashaqbeh G, et al. An energy-efficient and security aware route selection protocol for wireless sensor networks[J]. Security & Communication Networks, 2015, 7(11): 2015-2038.
[13] 相亮亮. 无人机在军事中的应用与发展[J]. 科技展望, 2016, 26(14): 292.
Xiang Liangliang. The military application and development of UAV[J]. Technology Outlook, 2016, 26(14): 292.(in Chinese)
[14] Goraj Z. UAV platforms designed in WUT for border surveillance[C]. AIAA Infotech & Aerospace 2007 Conference and Exhibit, 2013.
[15] 孙健, 倪训友. 无人机国内外发展态势及前沿技术动向[J]. 科技导报, 2017, 35(9): 109.
Sun Jian, Ni Xunyou. Development trend and frontier technology trend of UAV at home and abroad[J]. Science & Technology Review, 2017, 35(9): 109.(in Chinese)
[16] 袁锁中. 数字式无人机飞行控制系统研制[J]. 计算机测量与控制, 2003, 11(1): 64-65.
Yuan Suozhong. Development of digital flight control system for UAV[J]. Computer Measurement & Control, 2003, 11(1): 64-65.(in Chinese)
[17] 郭珊珊. 反无人机技术与产品发展现状[J]. 军事文摘, 2016(19): 36-39.
Guo Shanshan. Development status of anti-UAV technology and products[J]. Military Digest, 2016(19): 36-39.(in Chinese)
[18] 程旭维, 汤霞清, 郭理彬, 等. GNSS接收机抗干扰和欺骗检测技术研究[C]. 第六届中国卫星导航学术年会, 2015: 1-9.
Cheng Xuwei, Tang Xiaqing, Guo Libin, et al. Research on GNSS receiver spoofing detection technology[J]. 2015 6th Satellite Navigation Conference, 2015: 1-9.(in Chinese)
[19] 任宏光, 刘颖. 无人机侦察打击一体化武器系统发展[J]. 飞航导弹, 2009(6): 47-49.
Ren Hongguang, Liu Ying. Development of integrated weapon system for UAV reconnaissance and strike[J]. Aerodynamic Missile Journal, 2009(6): 47-49.(in Chinese)
[20] 朱菲菲. 某侦察打击一体化无人机火控关键技术研究[J]. 电光系统, 2017(2): 32-37.
Zhu Feifei. Research on decision support technique for a reconnaissance and strike integrated UAV[J]. Electronic and Electro-optical Systems, 2017(2): 32-37.(in Chinese)
[21] 刘洪剑, 王耀南, 谭建豪, 等. 一种旋翼无人机组合导航系统设计及应用[J]. 传感技术学报, 2017, 30(2): 331-336.
Liu Hongjian, Wang Yaonan, Tan Jianhao, et al. A kind of design and application of integrated navigation systems for UAVs[J]. Chinese Journal of Sensors and Actuators, 2017, 30(2): 331-336.(in Chinese)
[22] 梅丹, 高丽. 定向能武器在反无人机作战中的应用[J]. 中国设备工程, 2017(7): 40-42.
Mei Dan, Gao Li. Application of directional energy weapon in anti-UAV operation[J]. China Plant Engineering, 2017(7): 40-42.(in Chinese)
[23] 刘丽, 魏雁飞, 张宇涵. 美军反无人机技术装备发展解析[J]. 航天电子对抗, 2017, 33(1): 60-64.
Liu Li, Wei Yanfei, Zhang Yuhan. The development of anti-UAV technical equipment of the U.S. armed forces[J]. Aerospace Electronic Warfare, 2017, 33(1): 60-64.(in Chinese)
[24] 杨勇, 王诚, 吴洋. 反无人机策略及武器装备现状与发展动向[J]. 飞航导弹, 2013(8): 27-31.
Yang Yong, Wang Cheng, Wu Yang. Current situation and development trend of anti UAV strategy and weapon equipment[J]. Aerodynamic Missile Journal, 2013(8): 27-31.(in Chinese)
[25] 张承伟, 郝绪彤, 郭一蓉. 基于帧间差分法的动体特征速度聚类分析[J]. 计算机应用研究, 2016, 33(10): 3151-3155.
Zhang Chengwei, Hao Xutong, Guo Yirong. Clustering analysis of moving objects characteristic velocity based on inter-frame difference method[J]. Application Research of Computers, 2016, 33(10): 3151-3155.(in Chinese)
[26] Panda D K, Meher S. Detection of moving objects using fuzzy color difference histogram based background subtraction[J]. IEEE Signal Processing Letters, 2016, 23(1): 45-49.
[27] Rozantsev A, Lepetit V, Fua P. Detecting flying objects using a single moving camera[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(5): 879-892.
[28] Yang T, Wang X, Yao B, et al. Small moving vehicle detection in a satellite video of an urban area[J]. Sensors, 16(9): 1528.
[29] Zhu Y, Zhang C, Zhou D, et al. Traffic sign detection and recognition using fully convolutional network guided proposals[J]. Neurocomputing, 2016, 214: 758-766.
