用于实验动物图像分区采集的可编程数控载物滑台系统的研制
2018-01-29雷吴迪郑和平吴剑威
雷吴迪,郑和平,吴剑威
福州总医院 a.医学工程科;b.比较医学科,福建 福州 350025
引言
体视显微镜又称“实体显微镜”或“解剖镜”,光学放大倍数为20~100倍,是一种具有正像立体感的目视仪器,在医疗系统中得到广泛应用。由于目前市场上现有的体视显微镜没有可移动的载物台系统,在对大目标样本(如实验动物)进行图像采集时,需要研究人员手工移动大目标样本进行分区段摄影,然后用分区段的图像合成全景图像,这在实际应用中存在诸多不便:① 当样本量大时,会大量增加研究人员的工作量;② 由于手工移动的精确度有限,这给后期合成全景图像带来困难。
本文设计了一种简易精密的可编程数控载物滑台系统[1],在体视显微镜基础上加装数码相机[2-3]和可编程数控载物滑台系统(x、y轴),可实现体视显微镜下的可编程精密分区段或动态观察摄影[4]。
1 系统设计
整个实验动物图像分区采集系统包括3个组件:数码相机(OLYMPUS SZ-16)[5]、体视显微镜(moticam 1300)和可编程数控载物滑台系统[6-7](以下简称:滑台系统)。其中,滑台系统由电源、数控两轴运动控制器[8]、步进电机驱动器[9]、步进电机[10-11]和十字滑台组成,见图1。
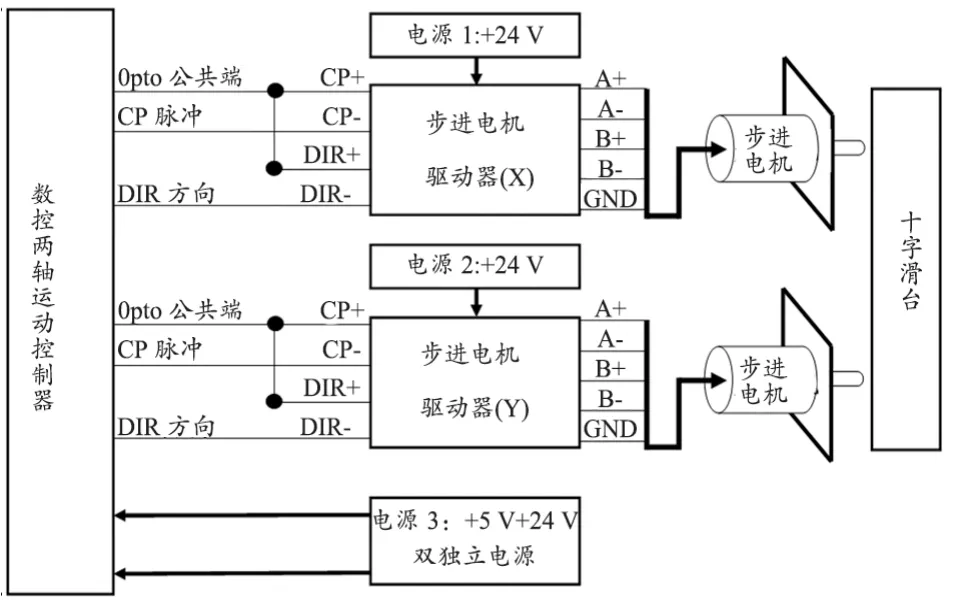
图1 可编程数控载物滑台系统
2 滑台系统硬件选配
2.1 数控两轴运动控制器
运动控制器选用广州汇程机电科技有限公司生产的HC130-2型两轴运动可编程控制器,该控制器采用高性能32位CPU,配备液晶显示器和全封闭触摸式操作键盘,内部存储器可存储48个运动程序,每个程序最大编程行数为420行,最高脉冲输出频率为150 kHz,配备电子齿轮,可实现复杂运动程序的编程(绝对运动、相对运动、增量运动、直线插补、顺圆插补、逆圆插补等)。
2.2 步进电机驱动器
步进电机驱动器选用雷赛M542型驱动器,其具有低电机发热、低运行噪声和更高的平稳性等特点;其微步细分数有15种,最大步数为25000 Pulse/rev;工作峰值电流范围为1.0~4.2 A,输出电流共有8档,电流的分辨率约为0.45 A,具有自动半流,过压和过流保护等功能;直流24 V供电。M542驱动器采用八位拨码开关设定动态电流(sw1/sw2/sw3)、半流/全流(sw4)和细分精度(sw5/sw6/sw7)。
2.3 步进电机
步进电机选用雷赛两相57步进电机(型号:HS8123-5040),其步距角度为1.8°,步距精度5%,保持转距0.9 N·m,额定电流3.0 A。
2.4 十字滑台
十字滑台是指由两组直线滑台按照x轴方向和y轴方向组合而成的组合滑台,结构见图2,其外观上看起来是中文中的“十”字,通常也称为坐标轴滑台。本系统十字滑台选用台湾CPC数控十字滑台,其由两个独立的单轴滑台组合而成,铝合金底座,可承重30 kg,滚珠丝杆直径12 mm,螺距4 mm,双滑块导轨,轨道宽度9 mm,配合雷赛两相57步进电机,其运动精度可达0.02 mm,见公式(1)。


图2 十字滑台
整个系统组成后,见图3,由于十字滑台不能直接置于物镜下,因此,将一片有机玻璃板固定在滑台上,作为动物承载台,通过滑台的运动,带动承载台运动。
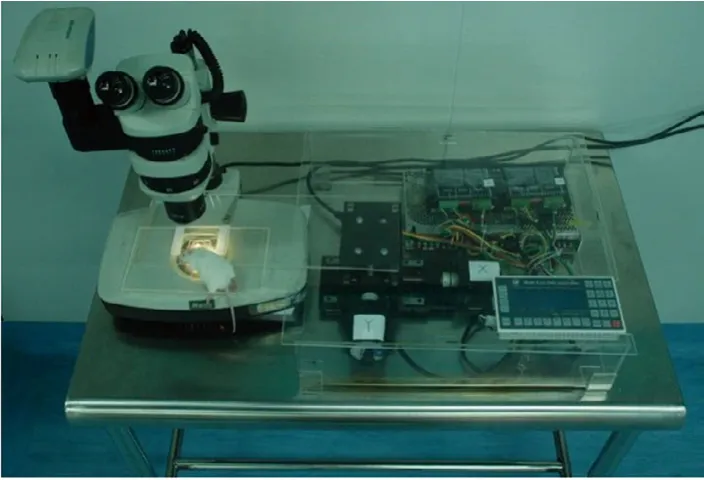
图3 实验动物图像分区采集系统
3 滑台系统参数设定
3.1 步进电机驱动器参数设定
(1)输出电流设置:因步进电机额定电流为3.0 A,因此在步进电机驱动器sw1/sw2/sw3设定为on/on/on,输出驱动电流3.0 A。
(2)半流/全流设置:通过sw4来设定驱动器的自动半流功能。off表示静态电流设为动态电流的50%,on表示静态电流与动态电流相同。本系统中将sw4设成off,使得电机和驱动器的发热减少,可靠性提高,脉冲串停止后约0.3 s左右电流自动减至50%,电机发热量理论上可减少65%。
(3)微步细分精度设置:两相步进电机的转矩决定于两相励磁电流产生的合成矢量磁场,要使步进电机平稳匀速、等距角转动,关键是要使合成矢量磁场幅值稳定、角度变化均匀,因此,为了控制电机励磁绕组中的电流,在每个激励脉冲中加入多个稳定的中间态,即将每个脉冲再细分,按阶梯递增电流,从而实现合成矢量磁场幅值稳定、角度变化均匀。驱动器微步细分精度的设定与运动控制器电子齿轮参数相对应,M542型驱动器微步细分精度为400~25000步数/转。本系统中,将微步细分精度设定为25000 步数/转(sw5/sw6/sw7/sw8=off/off/off/off)。
3.2 数控两轴运动控制器电子齿轮参数设定
HC130-2型两轴运动可编程控制器通过电子齿轮来设定滑台运动距离与步进电机脉冲的关联。电子齿轮参数设置如公式(2),在本系统中,电机单向转动一周所需的细分脉冲数为25000步数/转,电机单向转动一周所移动的距离为4 mm(滑台螺距),因此,电子齿轮比为25/4。

4 实验验证
本滑台系统现已应用于南京军区福州总医院比较医学科,在体视显微镜下对30只活体小鼠耳朵进行分区摄影[12],然后用photoshop CS5/photomerge功能自动合成每只鼠耳的全景图,观察其耳朵血管形态在某种因素下随时间(30 d)的形态学变化。
(1)实验材料:可编程数控载物滑台系统;30只清洁级ICR小鼠(雄性,体重25~30 g,鼠耳完整、无皮肤病变或外伤),由福建医科大学动物中心[SYXK(闽)2012-0001]提供。
(2)实验方法:小鼠耳朵进行分区摄影,将小鼠侧卧置于可编程数控载物滑台系统的动物承载台上,调节体视显微镜物镜并固定为25倍,编置程序(图4),“弓”型路线渐次、局部采集0、1、2、3、5、7、10、14、21、30 d的时间点图像。

图4 滑台系统小鼠耳朵分区摄影程序设计
(3)实验结果:小鼠耳朵分区摄影12幅图像,见图5。12幅分区图像经photoshop CS5/photomerge功能自动合成鼠耳的全景图[13-16],经背景修饰后,见图6。

图5 分区摄影图像
5 结论
本系统利用现有技术和资源,设计简单实用,可快速搭建实验动物大目标样本图像采集平台,并可根据大目标样本的实际情况,编制图像采集路径,实现了精密分区自动采集图像的目的,大大减少了工作人员的工作量,为后期合成图像带来了便利。本系统还可编制动态连续路径,实现动态跟踪摄影的目的。
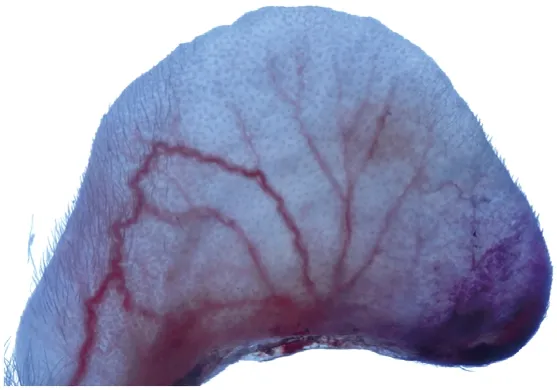
图6 合成图像
[1] 张宏波,曾立波,许贤泽,等.一种新型的显微镜载玻片自动装载系统设计[J].应用基础与工程科学学报,2005,13(2):185-193.
[2] 刘文爱,李丽凤,范航清.改装体视显微镜拍摄昆虫图像和CAD绘制昆虫形态图[J].应用昆虫学报,2011,48(3):787-789.
[3] 肖文雅,王红云.单反数码相机在医学摄影中的应用[J].福建电脑,2013,3:47-48.
[4] 李毅,问新民,苟大举.显微镜载物台自动控制及自动聚焦系统设计[J].计算机应用研究,2002,11:92-93.
[5] 金成玲.数码相机在病理大体摄影中的应用及意义[J].中国社区医师·医学专业,2012,5:224.
[6] 万婧妍,何平.基于TMS320F2812的三轴运动控制器设计[J].DSP开发与应用,2010,26(6-2):116-118.
[7] 丁金华,孙秋花,李明颖.基于嵌入式微处理器的两自由度数控滑台的研制[J].实验技术与管理,2008,25(6):43-45.
[8] 蓝杰,张浩然.基于STM32的微型步进电机驱动控制器设计[J].微型机与应用,2015,34(1):43-46.
[9] 袁贵栋,李翠英.用于实验教学的步进电机驱动器的设计[J].吉林化工学院学报,2011,28(9):49-51.
[10] 朱辉,吴根忠.基于单片机的步进电机虚拟细分技术的研究[J].计算机测量与控制,2014,22(11):3719-3720.
[11] 周云,陈兴新,陈磊,等.步进电机在核素注射器中的应用[J].中国医疗设备,2008,23(2):36-38.
[12] 胡文华,顾达聪,彭瑞云,等.实验动物和脏器标本的摄影方法[J].中国医学教育技术,2006,20(2):162-163.
[13] 刘静.Photoshop中的抠图合成技术分析[J].福建电脑,2015,11:77-78.
[14] 马月进.利用Photoshop混合颜色带合成图像的方法探索[J].电脑知识与技术,2009,5(33):9499-9500.
[15] 韩立龙,周吉.一种三维动画与实拍影像合成技术的设计与实现[J].计算机与数字工程,2012,40(9):90-93.
[16] 王文勇,赵一龄,王伯.应用Photoshop软件合成FISHHER_2多色荧光图像[J].诊断病理学杂志,2013,20(2):117-118.
