惯性测量系统火箭橇试验图像测速方法
2018-01-29魏宗康
魏宗康,江 麒,吕 腾
惯性测量系统火箭橇试验图像测速方法
魏宗康,江 麒,吕 腾
(北京航天控制仪器研究所,北京,100039)
在惯性测量系统火箭橇试验中,目前主要采用雷达测量设备、遮光板时空测量装置测量橇体的运行位置和速度。火箭橇点火时,会产生高速度,强尾焰,大噪声和剧烈振动等外测条件,雷达测量设备、遮光板时空测量装置无法准确测量火箭橇运行的速度。为满足未来轨道延长和火箭橇多级点火越来越迫切的需求,提出火箭橇试验图像测速方法,弥补上述两种方法缺陷并提高速度测量的精度。研究了照片反求,特征点提取,速度噪声的频谱分析,橇体运行速度的计算值和平滑值,为惯性测量系统火箭橇试验提供高精度的位置速度变化模型。
火箭橇试验;图像测速;照片反求;频谱分析
0 引 言
火箭橇试验是利用特殊设计的平台,搭载试验件和测试辅助设备,利用推进系统推动平台沿与地面固连的高精度机械导向滑轨运行,模拟试验件在启动、空气飞行、功能实现等工作剖面的动力学工况环境,通过测试系统获取试验环境参数和试验件的性能参数,并依此开展试验件性能验证、评价及失效模式分析工作的一项综合性试验技术。该实验具有产生大过载、高速度、强振动和冲击等综合条件的能力,可以最大程度地模拟导弹真实飞行环境。
目前,主要采用雷达测量设备或遮光板时空测量装置测量橇体的位置和速度。火箭橇轨道逐渐由3 km向9 km甚至16 km发展,采用多级点火的需求越来越迫切。在惯性测量系统火箭橇试验中,雷达测速对于低速物体测量精度较低,遮光板时空测量装置会受到尾焰高光影响,均存在不足。因此迫切需要一种新的方法来准确测得火箭橇运行速度。
1 图像测速原理和设计
照片的数据是由像素点的二维坐标附加颜色值构成,其中像素点的颜色值由红色、绿色和蓝色不同比值构成[1]。利用此幅照片的数据,通过一组颜色值,即可找到满足这组颜色值的像素点坐标。
照相机拍摄的照片中,物体实际尺寸存在畸变。利用照片反求技术,计算其畸变的关系,然后矫正照片,使其中每个像素点大小代表的实际空间尺寸相同。照相机连续拍摄照片的时间间隔相同,找到一组照片中橇体上特征点的位置变化,组合这些特征点位置变化得到火箭橇位置变化,通过换算即可得到火箭橇橇体的速度变化。
目前,火箭橇试验场已经架设高速照相机,但只用于观察发动机点火瞬时橇体分离是否正常等功能监测用途。利用火箭橇试验场已经架设的高速照相机拍摄照片,结合上述步骤可以得到橇体速度变化,该方法为惯性测量系统火箭橇试验提供高精度的位置和速度数据。
2 照片反求及矫正
2.1 反求工程
反求工程也称逆向工程,它的思想最初来自从油泥模型到产品的实物设计过程,随后发展成一个以先进产品设备的实物、技术软件(图纸、程序、技术文件等)或影像(图片、照片等)为依据的生成几何模型的方法,它是20世纪80年代后期出现在先进制造领域里的新技术。目前,比较常用的方法有激光扫描法、坐标测量法等。但它们都有不尽如人意的地方,如使用较为广泛的三坐标测量仪,它需要一定的工作环境,速度慢、效率低且价格昂贵。随着计算机及光电技术的发展,光学式非接触测量方法与光学成像法等越来越受到人们的青睐。另外,相对于传统的手工测绘工艺,利用照片来进行三维反求更有其明显的优势,因为它是通过相机拍下来的照片来反求出实体尺寸,可以大大提高设计效率。因而,这方面的研究越来越受到设计人员关注。从工程技术角度来看,反求工程技术包含实物反求、软件反求和影像反求等3个方面,其中影像反求设计是根据产品的说明书、图片、照片及广告介绍等相关参考资料,开展产品设计的一种现代设计方法,照片反求是影像反求中的一种[4~6]。
2.2 照片坐标系定义及转换
图1为原始照片像素点坐标系。是以照片左上角为原点、轴垂直向下的右手坐标系;原始照片中心点坐标系1是以照片中心为原点、1轴水平向右的右手坐标系,其中,0为原始照片中纵向边长的像素个数,0为原始照片中横向边长的像素个数。

图1 原始照片坐标系
坐标系和1坐标系的转换关系为

式中为原始照片中纵向边长某点的像素个数;为原始照片中横向边长的某点像素个数。
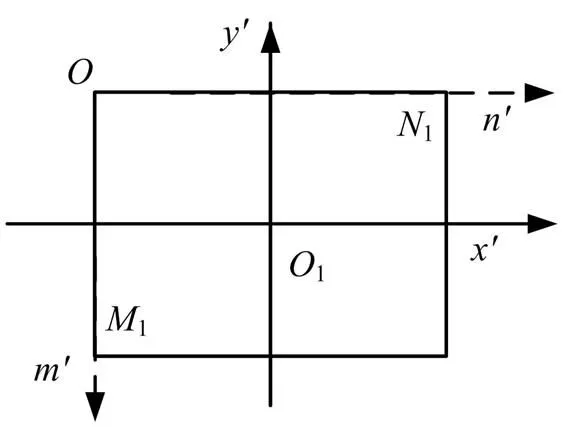
图2 矫正后照片坐标系

2.3 照片矫正
实物实际尺寸会在照片中发生畸变,通过照片反求得到实物实际尺寸,计算出畸变关系,从而矫正照片。
图3为从左到右依次提取原始照片中扣件在1系的坐标值(pp)(12),其中方框为扣件位置,根据lll用最小二乘法计算系数l和l的值。

图3 原始照片中扣件位置
计算相邻两个扣件的距离和相邻两个扣件中心位置坐标(0,q0,q)121;采用最小二乘法计算系数和:


其中,

由上述求得系数、l和l的值,设置1和1,并且矫正原始照片:



3 特征点提取及火箭橇位置变化
在火箭橇运行过程中,尾焰、障碍物、光线等外界因素都会对火箭橇上的特征点颜色值产生影响,因此需要选取合适的特征点才能分析出火箭橇的位置变化。利用上述照片反求和矫正方法,得到矫正后火箭橇照片像素点的单位长度所代表的实际空间距离相等,从而通过观察矫正后照片火箭橇上特征点的位置变化即可得到火箭橇橇体的位置变化。
3.1 特征点选取
照片实际是由像素点构成,每个像素点有一组二维坐标和颜色值数据。根据像素点颜色值数据,可以在照片数据信息中读取出像素点位置。
图4为照片在放大之后得到每个像素点坐标,其中标记为特征点的像素点颜色值与周围像素点的颜色值差值大。此点的辨识度高并且环境光线对其的影响较小,所以选取此点作为特征点。

图4 像素点照片
3.2 特征点组合
火箭橇在运行过程中,近似为形状不变的刚体,所以不同特征点在橇体的坐标关系在每一时刻保持不变。特征点并不能在整个过程保持颜色值不发生显著变化,最好选取多个特征点组合分析橇体位置变化。图5为火箭橇点火前示意图。

图5 火箭橇点火前示意
如图5所示,在发动机点火前特征点I和特征点II都可以作为特征点,根据特征点出现时间和障碍物影响,首先使用特征点I,当特征点I被障碍物遮挡时再使用特征点II。图6为火箭橇点火后示意图。

图6 火箭橇点火后示意
如图6所示,发动机点火后特征点II被尾焰强光完全覆盖无法识别,这时再一次使用特征点I。
3.3 火箭橇位置变化
根据各个特征点在火箭橇橇体上的坐标关系,不同的特征点位置变化可以组合为火箭橇橇体的位置变化。
从第1幅矫正后的照片开始,等间隔选取幅照片,找到这些照片橇体特征点坐标;同时提取橇体的特征点在此位置的像素值。根据这些等间隔照片确定橇体特征点颜色红色、绿色、蓝色域值范围以及橇体特征点坐标所在的范围。
从第1幅矫正后的照片开始,读取每1幅照片信息,若特征点坐标所在的范围内,有坐标点满足橇体特征点红色、绿色、蓝色域值范围,则确定此坐标点为特征点的位置[2]。
图7为将不同的特征点位置变化组合得到火箭橇橇体位置变化。

图7 火箭橇橇体位置变化
4 橇体速度求取和平滑
从第1幅矫正在得到火箭橇橇体位置变化以及上述参数后,求取橇体的瞬时速度[7]:

式中为比例系数;为单个像素点对应的长度;为相机拍摄的频率;+1和分别表示第+1张照片和第张照片中火箭橇橇体位置的水平方向坐标,1 ≤≤– 1,为照片幅数。
对火箭橇速度噪声频谱分析[8],橇体速度噪声主要频段为大于10 Hz的高频段;因此,采用二阶低通滤波器对速度进行滤波以消除高频噪声[3],如图8所示。

图8 火箭橇速度噪声频谱分析


式中0,1,2,1,2为离散化二阶低通滤波器的参数[5]。
求取+1时刻s+1,并更新1(-1)和2(-1),重复上述步骤直到=-1时为止,得到速度平滑后的曲线,如图9所示,可以清晰地看到火箭橇橇体在整个运行过程的速度变化。

图9 速度平滑曲线
5 结 论
根据目前火箭橇速度测量的方法以及未来火箭橇发展方向,提出了一种火箭橇试验图像测速方法。该方法不受火箭橇速度和尾焰点火高温高光影响,火箭橇试验中关键时刻的速度测量精度比遮光板时空测量装置更高,同时成本可控,更加适应于未来延长火箭橇轨道和多级点火的火箭橇试验。
[1] 张铮, 王艳平, 薛桂香. 数字图像处理与机器视觉—Visual C++与Matlab实现[M]. 北京: 人民邮电出版社, 2010.
[2] 薛定宇. 控制系统计算机辅助设计—MATLAB语言与应用 (第2版)[M]. 北京: 清华大学出版社, 2006.
[3] 陈东升, 魏宗康. 惯性测量装置火箭橇试验模拟导弹飞行过载方法[J]. 导弹与航天运载技术, 2009(4): 10-15.
[4] 聂冬金. 基于照片反求产品原型的研究[D]. 上海: 华东理工大学, 2013.
[5] 夏刚, 魏宗康, 陈东生, 王常虹. 惯性平台系统火箭橇试验数据处理方法[J]. 中国惯性技术学报, 2010(2): 5-8.
[6] 栗全庆, 王宏, 张英杰, 赵汝嘉. 实物反求工程的关键技术分析[J]. 机械设计, 2000(6): 4-6.
[7] 李国庆. 火箭橇外测系统的研制[D]. 哈尔滨: 哈尔滨工业大学, 2012.
[8] 段宇鹏, 魏宗康, 刘建波, 刘璠. 惯性测量装置火箭橇试验外测数据融合方法[J]. 中国惯性技术学报, 2013(1): 25-39.
Velocity Measurement of Photographs on IMU Rocket Sled Testing
Wei Zong-kang, Jiang Qi, Lv Teng
(Beijing Institute of Aerospace Control Devices, Beijing, 100039)
On IMU rocket sled testing, radar and light interrupter are usually used to measure rocket sled testing’s velocity and position. When rocket sled ignites, it produces high velocity, strong tail fire, large noise and vibration.Measurement of radar and light interrupter cannot get accurate velocity of rocket sled. To meet the needs of longer track and multistage ignition, Velocity measurement of photographs can cover the shortage of measurement of radar and light interrupter and improve the precision of rocket sled testing. It includes reversion of photographs, characteristic points extracting, the optimization of characteristic points’ position, frequency spectrum analysisof noises on velocity and velocity calculating and smoothing, it also provides a high precise model of position and velocity on IMU rocket sled testing.
Rocket sled testing; Velocity measurement of photographs; Reversion of photographs; Analysis of frequency spectrum
1004-7182(2017)06-0056-05
10.7654/j.issn.1004-7182.20170613
V448.25+2
A
2016-12-17;
2017-01-19
魏宗康(1973-),男,研究员,主要研究方向为导航、制导与控制