基于像素点筛选的舰船湍流尾迹检测算法
2019-01-23韩笑赵雨欢刘鹏
韩笑, 赵雨欢, 刘鹏
(复旦大学 电磁波信息科学教育部重点实验室, 上海 200433)
0 引言
随着我国海洋事业的发展,舰船检测受到越来越多的重视。相比光学图像,合成孔径雷达(SAR)通过发射、接受微波信号对观测区域进行成像,具有全天时,全天候观测的优势。在一定条件下,SAR图像中的舰船尾迹可延伸若干乃至几十千米[1],呈现出一种有宽度的线性特征,因此有时比舰船本身更容易识别,并有助于反演出航速,航向等舰船运动信息。
传统的SAR图像尾迹检测方法大多使用Radon变换,如文献[3],[4],即将含尾迹的SAR图像投影至Radon变换域中,寻找对应于线性特征的峰值点,从而实现对尾迹的检测。传统的Radon变换检测方法受图像噪声影响小,但是在尾迹长度较短时易发生漏检,而且无法获得尾迹的长度以及起始点的位置信息。此外,Radon变换是对不同角度以及不同位置的直线上的像素进行积分,由于不同直线所包含的用来积分的像素数目不同, Radon变换的图像普遍存在双X亮纹,如图1所示,这对尾迹峰值点的检测造成不便。
2001年,王世庆,金亚秋[6]将形态学图像处理技术与Radon变换相结合进行尾迹检测,具有较好的鲁棒性。2003年,张宇,黄韦艮[10]提出了局部Radon变换,克服了传统Radon变换无法检测较短长度尾迹的缺点。2004年,钟劲松和朱敏慧[9]提出了归一化Radon变换,克服了Radon变换中沿着各条直线积分像素点数目不同的缺点。2005年,邹焕新[8]等将Radon变换峰值点的一维截面用小波变换进行匹配,获得峰值点的特征向量,然后进行分类决策,有效地提取了Radon域中的尾迹峰值点。2016年,杨国铮等[7]则使用形态成分分析与剪切波变换实现了舰船尾迹的检测。
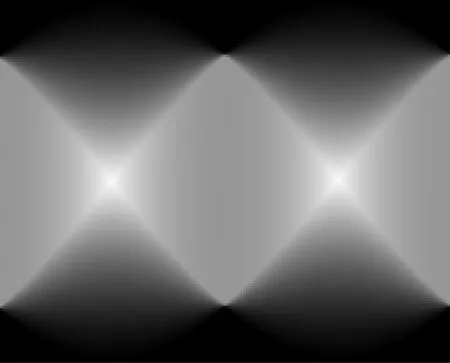
图1 对全1矩阵进行Radon变换后的双X亮纹
有别于Radon变换,本文提出的SAR图像湍流尾迹检测方法基于像素点筛选。其基本思想如图2所示。

图2 像素点梯度方向示意图
湍流尾迹上的像素点与背景像素点的特性有明显不同:湍流尾迹上的像素点幅度普遍较低,并且梯度方向与尾迹方向在一定范围内具有一致性;而背景像素点的幅度及像素点梯度方向较湍流尾迹上的像素点而言更加杂乱。利用这一区别,对SAR图像上的像素点按灰度从小到大进行逐级筛选,即对于某一灰度级别的像素点,将在一定距离内,幅度以及梯度方向相近的像素点判决为湍流尾迹上的像素点;而对于幅度及梯度方向杂乱的像素点,我们将它判决为背景上的像素点。这种基于像素点筛选的方法避免了传统Radon变换检测尾迹时Radon变换域极值点的错选,起始点信息的丢失等缺点。
2 基于像素点筛选的尾迹检测
为了提高检测效果,首先对图像进行预处理,包括去除强点以及高斯滤波的初始化。预处理操作后,如果是小尺寸图像,将直接进行像素点的逐级筛选,获得小尺寸图像的初步筛选结果图;如果为大尺寸图像,首先将图像分割为边缘重叠的子图,然后对各子图进行逐级筛选,再将得到的各个筛选后的子图进行拼接,得到大尺寸图像的初步筛选结果图。下一步对初步结果图进行形态学的处理以及分水岭分割处理,然后选取图像中长宽比满足给定要求的对象,作最小外接矩形,达到检测湍流尾迹的目的。为确定湍流尾迹的方向,利用给定方向的一维Radon变换粗略地检测该湍流尾迹对应的开尔文臂,从而得以判断该条湍流尾迹的大致方向。算法流程图如图3所示。
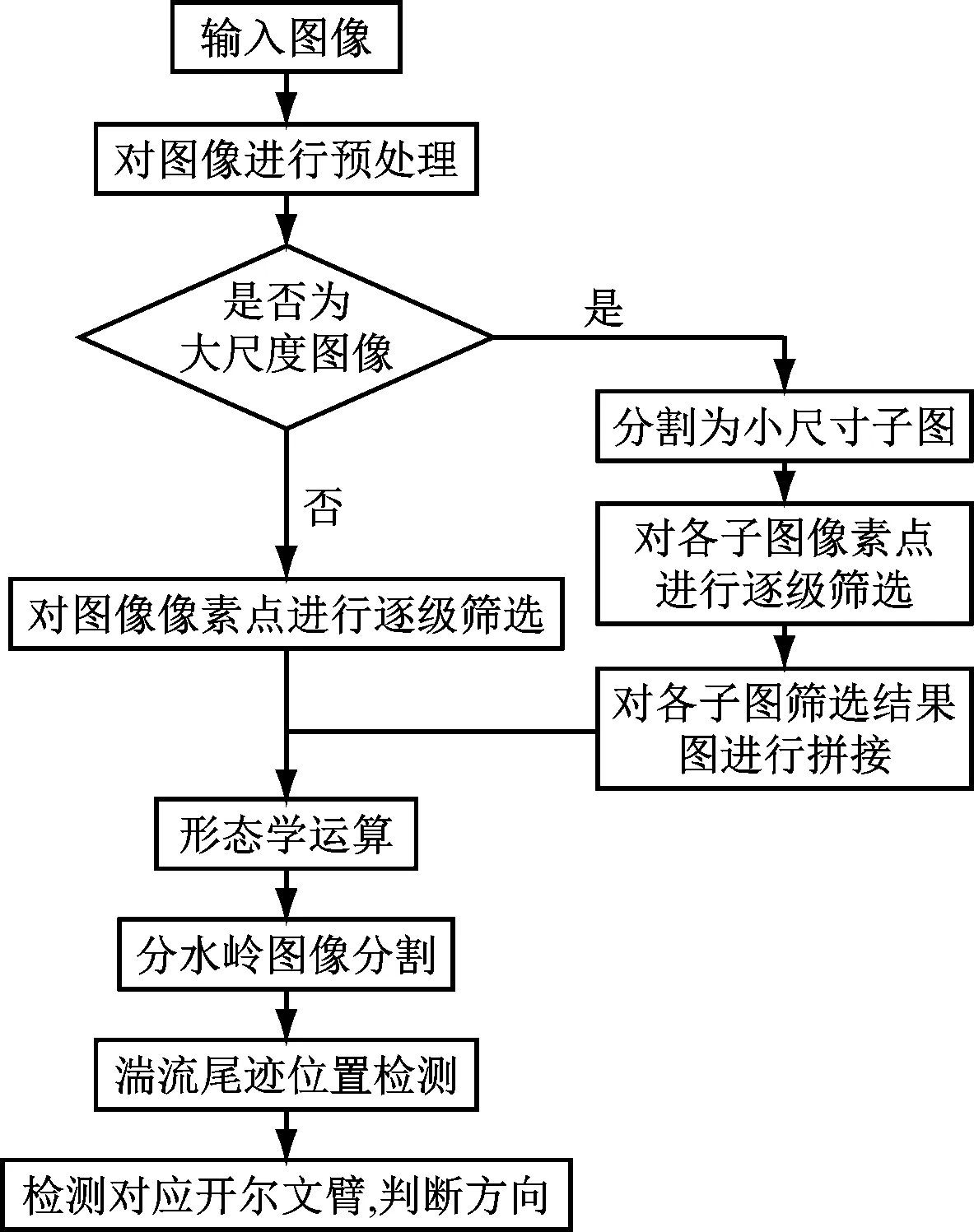
图3 像素点筛选算法流程图
2.1 对SAR图像进行预处理
为了提高检测精度,首先对SAR图像中的强点进行滤除:设f(x,y)为SAR图像中位于(x,y)的像素点的幅度值,以该像素点为中心,设置边长为w的矩形窗,矩形窗内含有边长为w0的保护窗口。边长w的矩形窗与边长w0的保护窗口之间为背景区域Φ(x,y)。计算Φ(x,y)内像素点的灰度平均值μ(x,y),将f(x,y)与μ(x,y)×q相比较(其中q为预设系数),若f(x,y)≥μ(x,y)×q,则认为位于(x,y)的像素点为强点,用μ(x,y)代替其灰度值。
除了滤除强像素点,本文还采用了高斯滤波的方式对SAR图像进行平滑预处理,从而进一步减少噪声点。
2.2 图像像素点筛选
得到预处理的图像后,对图像的像素点进行逐级的筛选,最后以置1的形式留下湍流尾迹位置的像素点,以置0的形式滤除背景位置像素点。
由于湍流尾迹在SAR图像中的灰度小于背景像素,所以本文将从低灰度得像素点开始筛选,将图像的像素点以灰度从小到大分若干个级别。在本文中为了减小计算量将像素点分成了L1,L2,…,L128个级别,然后对像素进行逐级过滤。具体算法如下:
Yi-1为第i-1次筛选像素点后的结果图,其中在前i-1次筛选中被滤除的像素以及尚未参加筛选的像素点置为0,参加筛选且留下的元素置1(Y0为全0的结果图)。在第i次筛选中,对灰度在Li级别内的所有像素点(像素点集合记为Xi)进行筛选,当前待筛选的像素点即为Xi中的像素,参与本次筛选计算的像素点为Xi中的像素点与Yi-1中置1像素点的并集(记为Pi)。
首先计算SAR图像所有像素点的梯度值以及梯度对应的该像素点的角度值,公式由文献[5]给出,像素点梯度值由(1)与(2),角度值由(3)计算得出,如式(1)~式(3)。
gx(x,y)=
(1)
gy(x,y)=
(2)
(3)
式中,f(x,y)为位置为(x,y)的像素点的灰度值。
对Xi内像素点进行筛选,对于其中的某一个像素点(x,y)i,如果在SAR图像中,像素点(x,y)i的周围存在(x′,y′)∈Pi且(x′,y′)≠(x,y)i,并且满足以下条件:(x,y)i与(x′,y′)的欧氏距离小于d;(x,y)i到(x′,y′)的方向的角度在[angle(x,y)i-Δ,angle(x,y)i+Δ]范围内;(x′,y′)满足|angle(x′,y′)-angle(x,y)i|≤Δ(不包括自身),则初步判断(x,y)i是位于湍流尾迹上的像素点,以此方法完成对Xi内像素点的筛选,其中d的计算由(4)给出,Δ为给定的参数。Xi内筛选留下的点与Yi-1置1像素点的并集即为Yi,将参与第i+1次筛选。
(4)
其中m,n为SAR图像长与宽上像素点个数,num(Pi)为Pi中元素的个数。
通过以上流程,将L1,L2,…,L128的像素点逐级筛选,最终可以得到初步结果图,在该图中,筛选留下的像素点置1,其他像素点置0。
2.3 实现对湍流尾迹的框选
经过上述方法得到的像素筛选初步结果图上,留下了湍流尾迹上的绝大部分像素点,同时也存在小部分背景中像素点,为一幅二值图像。湍流尾迹上留下的像素点大多密集连结,而背景中留下的像素点则稀疏离散,利用这一点,本文通过移除二值图像中面积较小的对象,滤除背景中离散稀疏的像素点。然后再对图像进行形态学的闭运算,将距离较近的像素点连结成连通的图形。
由于图像中尾迹的方向暂时未知,所以这里采用圆盘形状的结构单元进行形态学闭运算为式(15)。
Y=(X⊕S)⊗S
(5)
其中X为原图像,Y为闭运算后的图像,S为结构单元。此时湍流尾迹大体轮廓已经出现,但仍有部分未被滤除的背景上的内容与湍流尾迹相连。
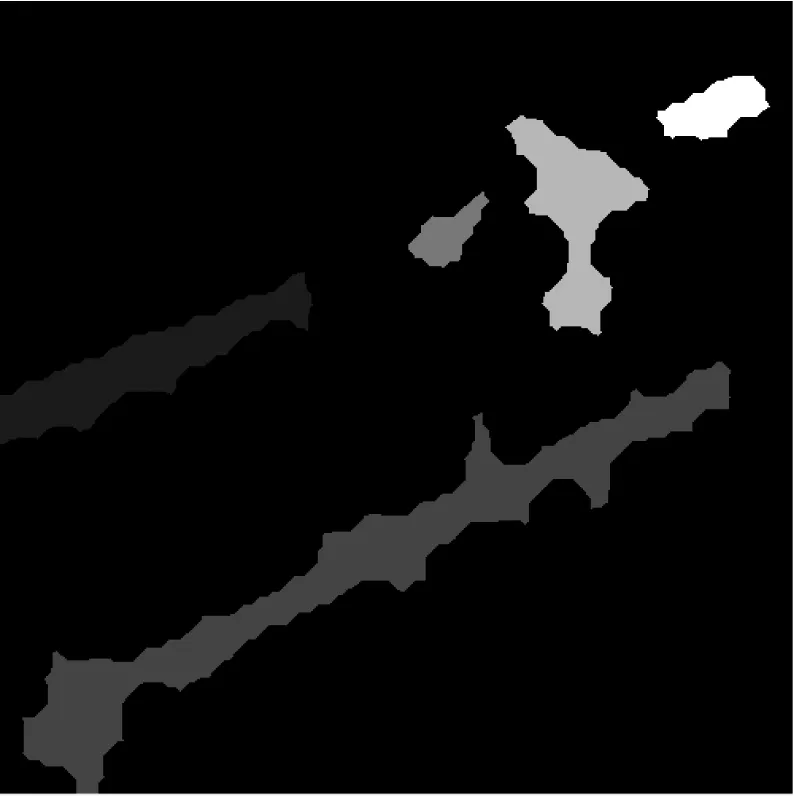
为了提高精度,本文使用了分水岭算法对图像进行分割,将背景像素点与湍流尾迹像素点分离。分割前后效果如图4所示,左图中左下角有一部分背景像素点与尾迹像素点相接,经过分水岭图像分割,可以把两部分分离,从而提高精度,如图4所示。
至此,结果图上只剩下诸个形状不规则的连通对象,这些对象可以分为两类,长条形状对象与不规则形状对象。其中长条形状对象对应于原来的SAR图像中的湍流尾迹。对图中所有对象作最小外接矩形,若某一对象的最小外接矩形的长宽比大于k,则认为该最小外接矩形所框选的部分为原来的SAR图像中湍流尾迹所在位置,k为给定系数。
2.4 尾迹方向判断
对于某一条已框选出的湍流尾迹,首先在原SAR图像上作出包含该湍流尾迹的SAR图像子图,如图5所示。
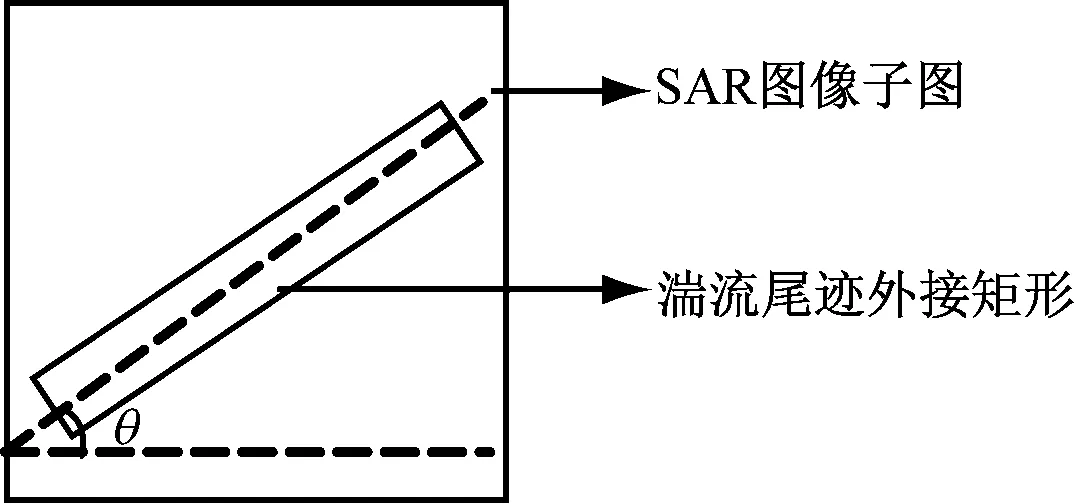
图5 选取SAR子图示意图
再对SAR子图进行标准归一化,即:
f′(x,y)=(f(x,y)-μ)/σ
其中f(x,y)为坐标为(x,y)的像素点的灰度,μ为SAR图像子图的灰度均值,σ为SAR图像子图的灰度标准差,f′(x,y)为变换后的灰度。
然后,可以根据前面得出的该湍流尾迹的外接矩形,得知湍流尾迹的倾斜角为θ,而湍流尾迹与开尔文臂倾斜角之间的夹角在多数情况下为大约19.5°[2],从而推得两条开尔文尾迹大约为θ±19.5°,所以对该SAR子图分别进行θ-19.5°与θ+19.5°方向的Radon变换,并将得到的两个一维向量进行自适应检测。

3 实验结果
3.1 对小尺寸图像进行湍流尾迹的检测
本文首先对一副216×216大小的TerraSAR-X图像进行湍流尾迹检测。原图如图6所示。
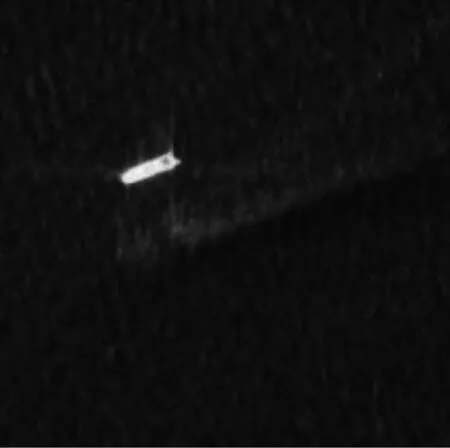
图6 小尺寸原SAR图像
可见一条较为明显的湍流尾迹。首先,对图像进行窗口边长w=35,保护窗口边长w0=15,系数q=1.5的强点过滤,然后对其进行高斯滤波,从而完成图像的预处理工作,预处理后的结果如图7所示。
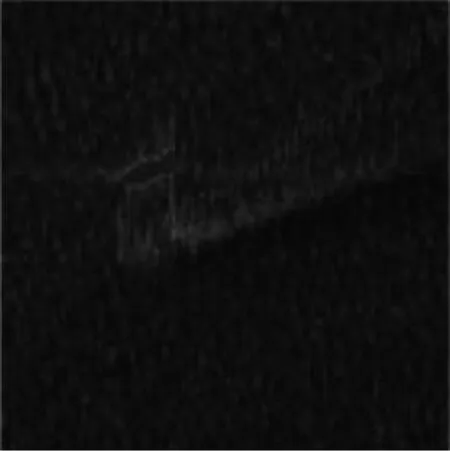
图7 预处理后的图像
然后,对图像进行像素点筛选,参数Δ=22.5°。像素点筛选结果如图8所示。
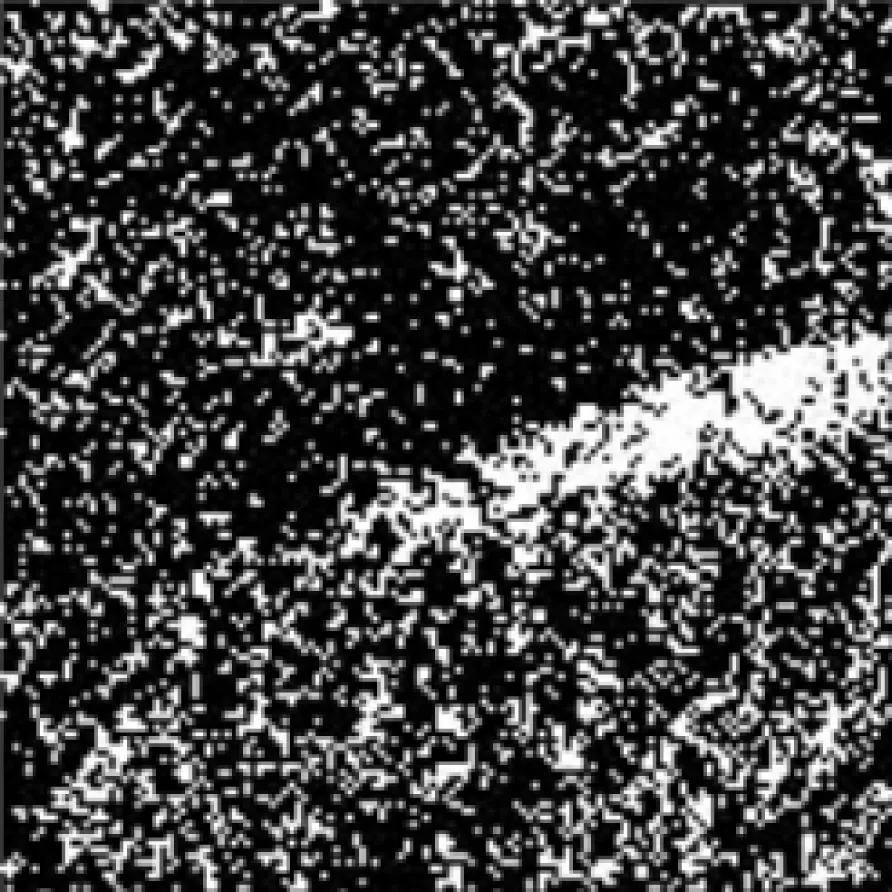
图8 像素筛选初步结果图
为一幅二值图像,值为1的像素点表示筛选后留下的像素点,值为0的像素点表示被滤除的像素点,筛选结果的点密度图,如图9所示。
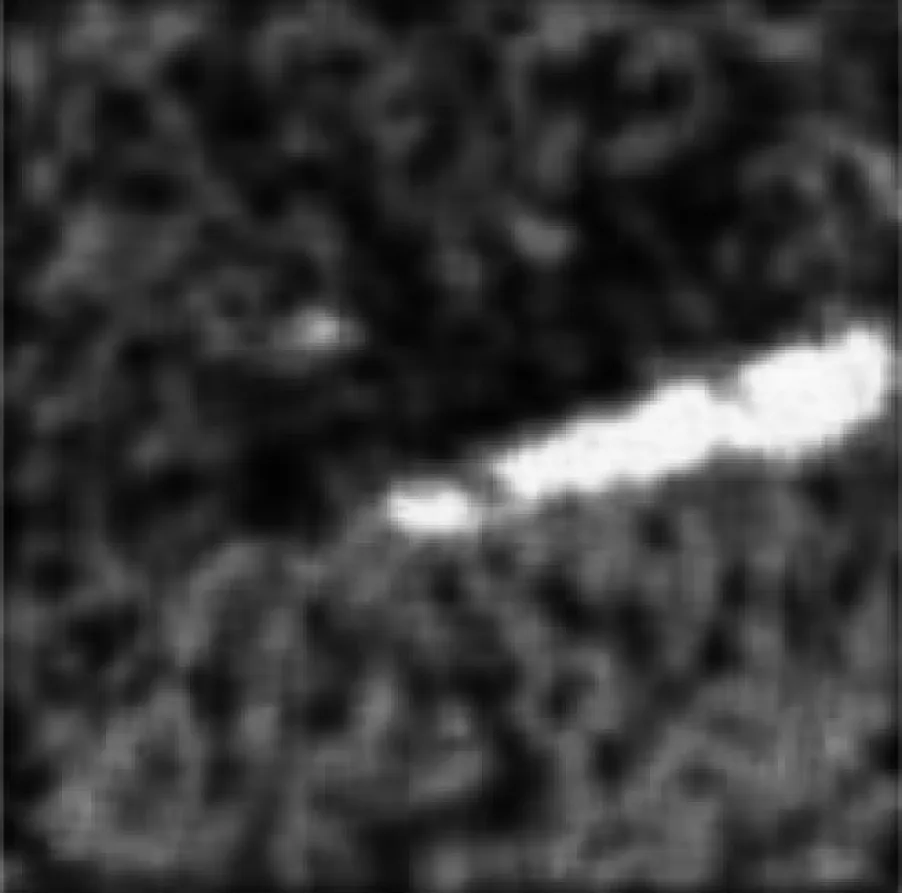
图9 筛选结果的点密度图
可以发现,在湍流尾迹的位置上,点密度明显高于背景位置的点密度。在得到的二值图像中,移除面积小于400的对象,从而可以进一步滤除大多数背景中的像素点,如图10所示。

图10 移除小面积像素点结果图
以半径为15像素的圆盘形状结构单元对图像进行形态学闭运算,并对其进行分水岭分割,提高精度,结果如图11所示。
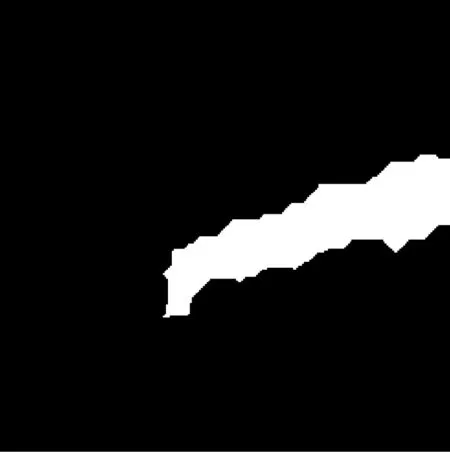
图11 形态学处理后结果图
对图11中的图形用最小外接矩形进行框选,认为长宽比k≥2.5的最小外接矩形所框选的区域为原SAR图像中的湍流尾迹所在位置。湍流尾迹检测结果如图12所示。
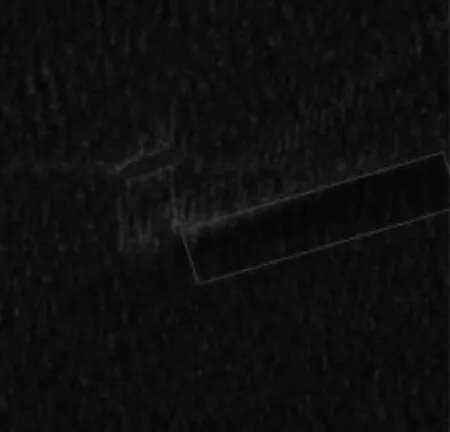
图12 湍流尾迹检测结果图
然后通过检测开尔文臂来判断湍流尾迹的方向,窗口宽度w=40,系数L=1.5,检测结果如图13所示。
从开尔文臂和湍流尾迹的相对位置可以判断湍流尾迹的左端为尾迹的起点。
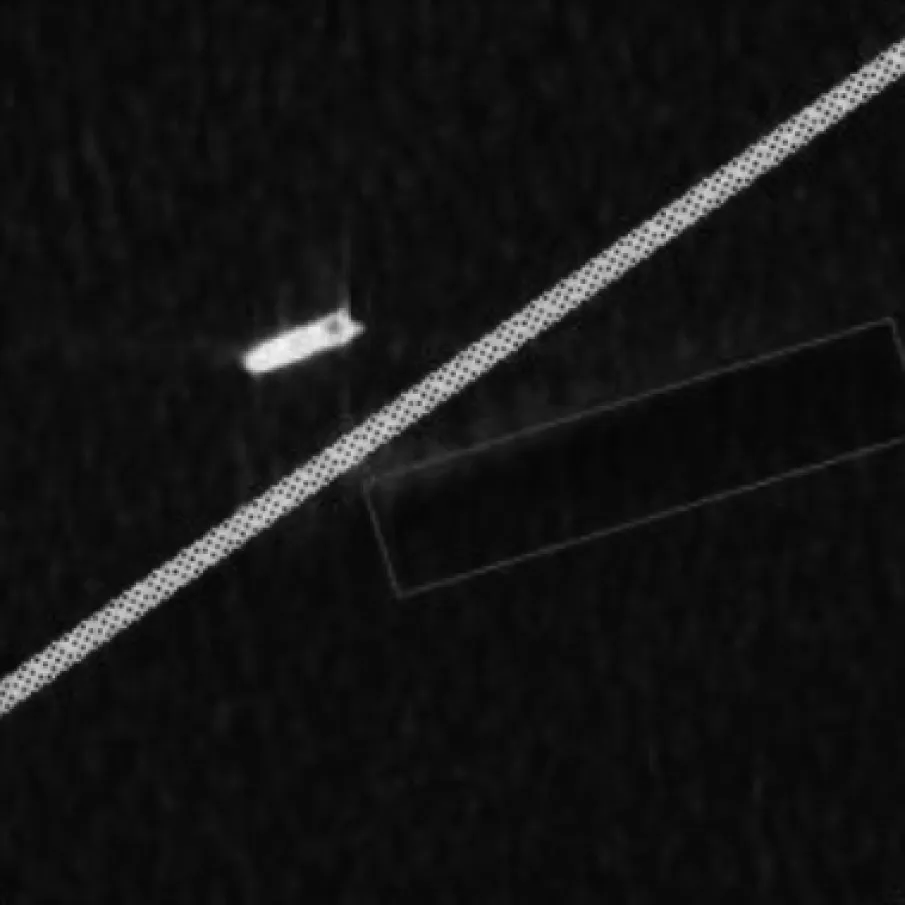
图13 开尔文臂检测结果图
3.2 对大尺寸图像进行湍流尾迹的检测
对一幅尺寸较大的1 122×1 122大小的TerraSAR-X图像进行湍流尾迹检测,原图如图14所示。
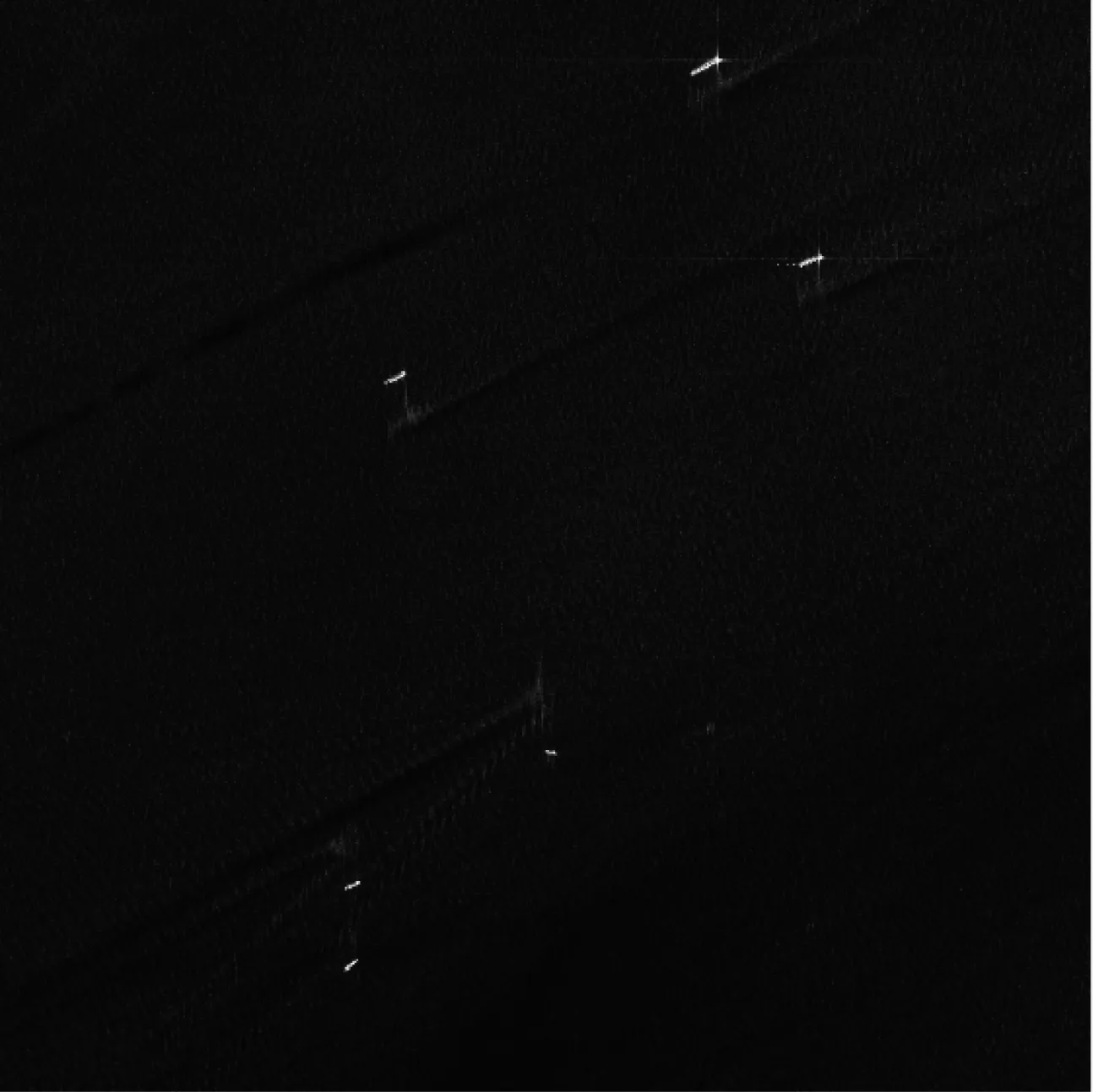
图14 原SAR图像
可以观察到图中存在着多条湍流尾迹,某些湍流尾迹所对应的开尔文臂也较为明显。首先对图像进行预处理操作。强点过滤的参数与小尺寸图像的预处理相同。由于图像尺寸较大,将图像均匀分割为150×150大小的子图,相邻子图之间存在宽度为50像素的重叠宽度。
对每个子图进行像素点筛选,参数Δ=22.5°,然后将各个子图的像素筛选结果进行拼接,像素点筛选结果如图15所示。
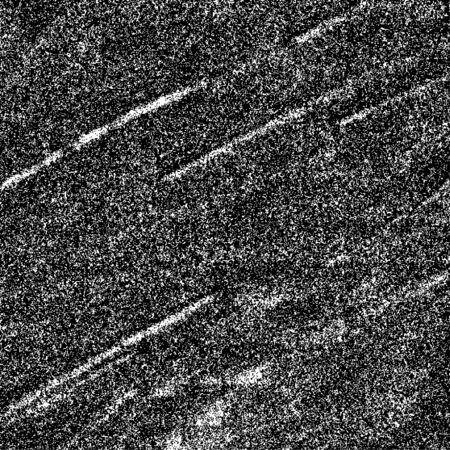
图15 像素筛选初步结果图
将背景中面积较小的对象当作杂点进行滤除,结果如图16所示。
然后进行形态学闭运算以及分水岭分割后的结果,如图17所示。
用最小外接矩形对图17中的对象进行框选,认为长宽比k≥2.5的最小外接矩形所框选的区域为原SAR图像中的湍流尾迹所在位置。
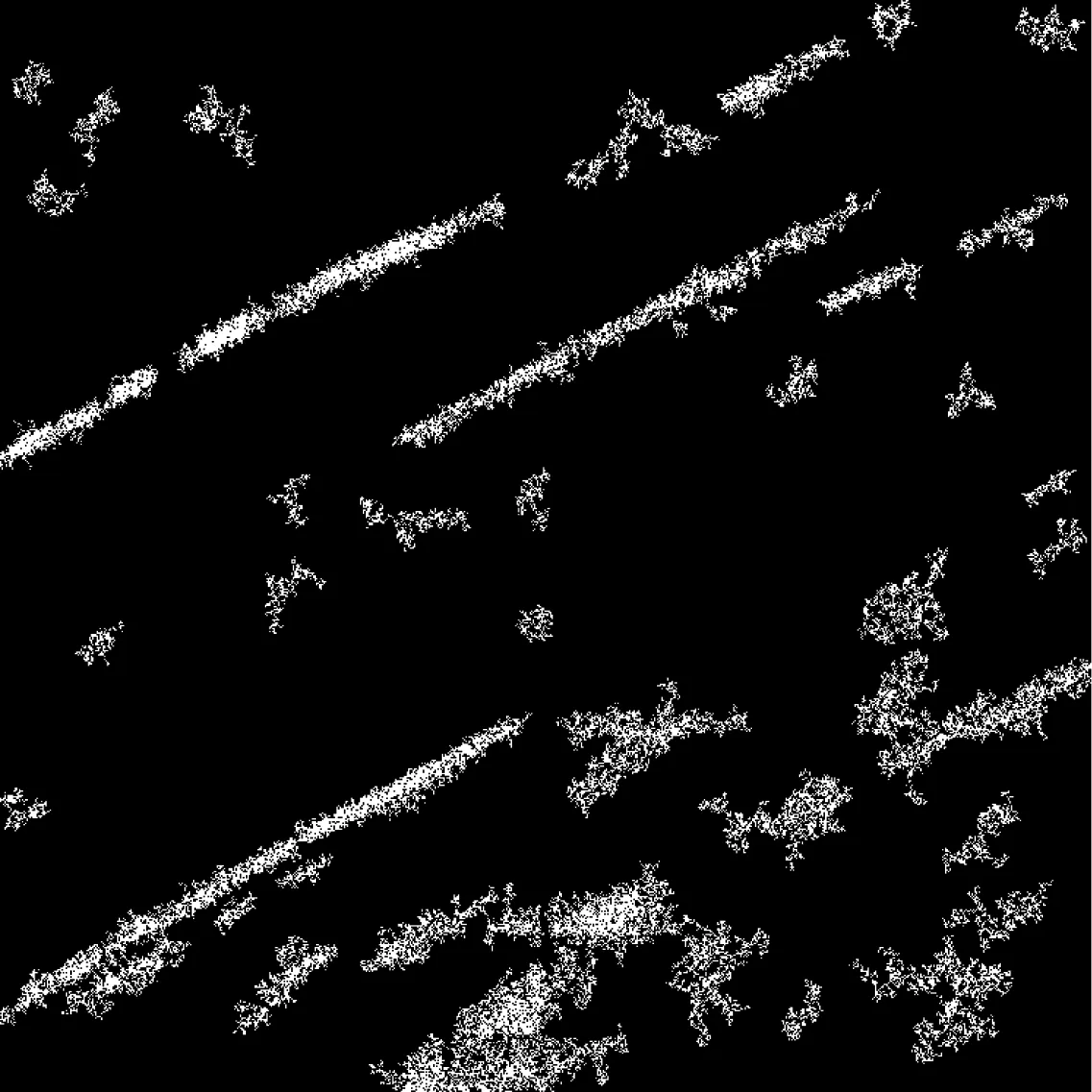
图16 移除小面积像素点结果图
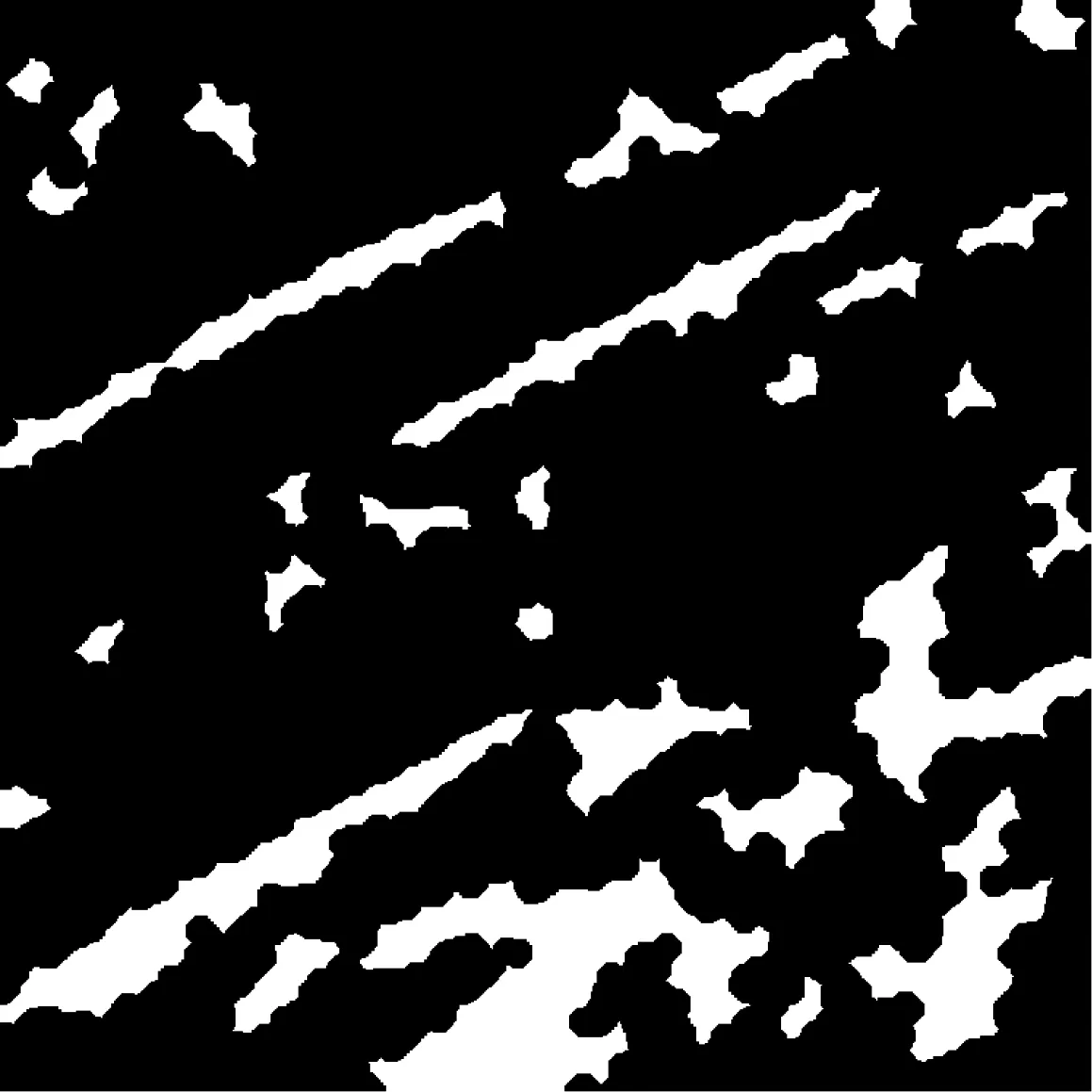
图17 形态学处理后结果图
湍流尾迹检测结果如图18所示。

图18 湍流尾迹检测结果图
最后进行开尔文臂的检测,具体参数与小尺度图像检测尾迹时的参数相同,检测结果如图19。
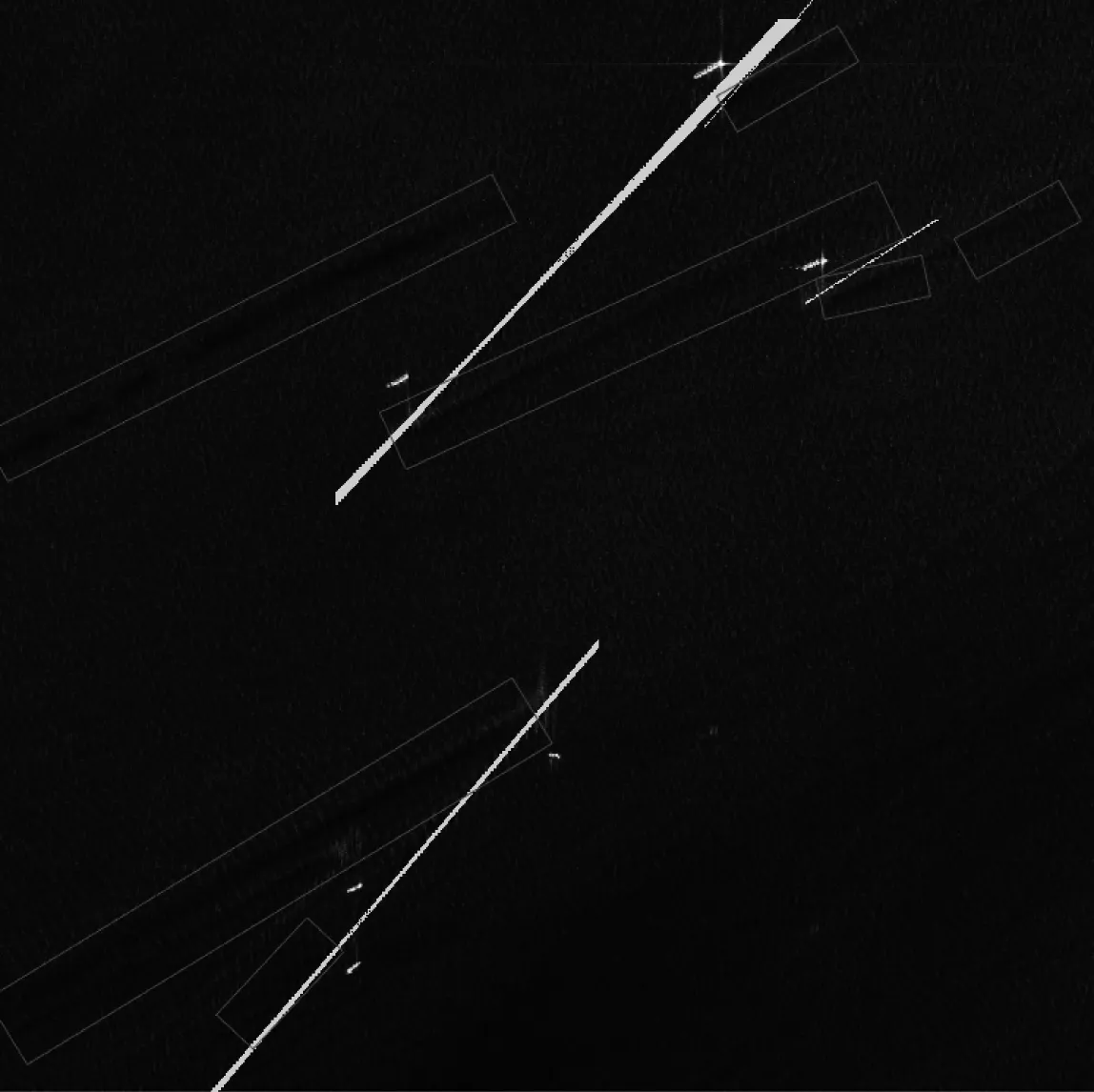
图19 开尔文臂检测结果图
4 总结
本文提出了一种像素点筛选的舰船尾迹检测方法,从湍流尾迹上的像素点灰度值以及梯度值具有一致性的角度对图像像素点进行筛选,实现对湍流尾迹的检测。在检测到湍流尾迹的基础上,通过给定方向的Radon变换以及一维自适应检测,实现了对开尔文臂的检测,并以此判断湍流尾迹的方向。该方法克服了传统Radon变换检测尾迹时极值点难以判断,尾迹长度,起点以及方向信息丢失的缺点,并且在SAR图像存在多条尾迹的情况下也可以取得较好的效果。
