多轴电驱动车辆横摆稳定性控制仿真研究
2018-01-29杨松樸曾广贵骆志伟吴春燕
杨松樸,曾广贵,骆志伟,吴春燕
多轴电驱动车辆横摆稳定性控制仿真研究
杨松樸,曾广贵,骆志伟,吴春燕
(北京航天发射技术研究所,北京,100076)
随着近年来对行车安全要求的提高,车辆的安全性研究也成为当前车辆研究中重要的一部分,对用于运载、发射等重型车辆尤其如此。对车辆横摆稳定性的控制是一种主动安全控制的手段,能够有效地保障汽车行驶过程中的侧向稳定性。因此对横摆稳定性控制方法的研究显得尤为重要。针对各轮独立电驱动多轴重型发射车辆的结构特点,建立了二自由度数学模型,利用其各电动轮独立可控的优点,对基于直接横摆力矩控制(Direct Yaw-moment Control,DYC)理论的横摆稳定性控制策略进行了研究和分析。并利用联合仿真,从响应速度、精确性等方面,验证了横摆稳定性控制系统的可行性。仿真结果表明该车辆稳定性控制系统可以使车辆横摆角速度和质心侧偏角得到有效控制,从而提高其稳定性。
稳定性控制;直接横摆力矩控制;联合仿真
0 引 言
当车辆在高速下进行转向操作或受外界其他影响时,侧向附着力易达到极限,从而发生危险的横摆稳定性失稳现象[1]。国外对汽车横摆稳定性控制的研究较早,2002年投入市场的Bosch公司的第8代ESP在车身横摆稳定的控制上性能已经十分优越,广泛应用于中高低档汽车。目前除了ESP,很多整车厂商都开发了车辆横摆稳定性控制系统,如Volvo的DTSC、GM的ESC等[2]。而在中国,车辆横摆稳定性控制的相关研究与国外相比起步很晚,虽然中国现时的ESP等横摆稳定系统产品的装配率已经比较高,但实际应用的技术仍没有掌握[3]。在军用重型多轴电驱动车的应用方面的相关技术研究更是空白。但随着中国多轴电驱动车辆的大力发展和对车辆安全性和动力学特性的要求不断提高,横摆稳定性相关研究前景良好[4]。
车辆稳定性控制的实现一般通过直接横摆力矩来防止转向不足和过度转向。相比于机械式传动,各轮独立电驱动车辆各个车轮驱动力能够实时地进行独立控制,车辆的横摆稳定性控制变得更加灵活有效,电机快速准确的力矩响应使其控制效果比传统的发动机控制大大提高。本文针对各轮独立电驱动重型车辆的特点,采用车辆横摆稳定性典型实施控制方案的直接横摆力矩控制,通过控制各轮纵向力以形成纠正车辆姿态的横摆力矩来实现稳定性控制。本文首先对车辆模型进行简化,建立多轴车二自由度数学模型,并以质心侧偏角和横摆角速度为控制变量,设计基于线性二次型最优控制算法的横摆力矩控制器,其中前馈控制器的比例增益系数由质心侧偏角和横摆角速度按照变动的权重系数确定,权重系数的取值与多轴车辆的特性相关[5]。然后建立车辆动力学仿真模型和控制模型,通过建立联合仿真接口,对车辆控制系统进行联合仿真。
1 横摆稳定性控制原理
对车辆稳定性的控制属于主动安全的范围,控制系统在车辆行驶过程中对行驶状态进行实时分析,纠正不理想的转向,并在极限工况下对车辆进行辅助操纵,保证其横向稳定性。由车辆动力学可知,横摆角速度和质心侧偏角是2个表征车辆行驶状态的重要量,它们反映了车辆的稳定性[6]。当车辆发生侧滑、甩尾等侧向失稳的危险现象时,车辆的横摆角速度与质心侧偏角也会偏离理想值,因此将横摆角速度和质心侧偏角进行控制使其处在理想值范围内是稳定性控制的核心内容。通过对车轮纵向力的控制提供横摆力矩纠正车辆的转向不足或过度转向,减小车辆质心侧偏角、使横摆角速度跟随理想的稳态横摆角速度,保持良好的驾驶感觉。
2 数学模型建立
为了进行控制策略的研究,首先对研究对象(即八轴电驱动车辆),进行数学建模,如图1所示。图1中将该结构简化为二自由度模型,其中前三轴与后两轴为转向轴,转向方式为逆相位转向。
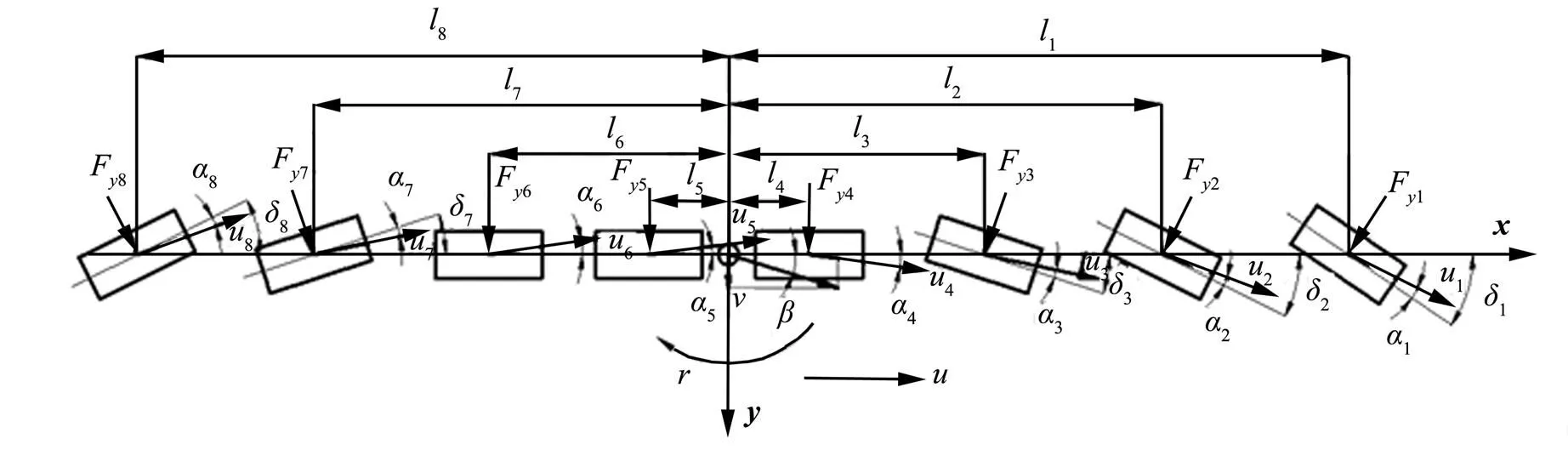
图1 八轴车的二自由度模型
u—各轮纵向速度;l—第轴到质心的距离;δ—各轴转角;α—各轮轮胎侧偏角;F—各轮轮胎横向力(以上=1~8);—纵向速度;—侧向速度;—横摆角速度;—质心侧偏角
根据牛顿定律,建立八轴车的线性二自由度车辆模型的运动微分方程[4]:


式中为整车质量;k为等效轮胎侧偏刚度,总定义为正值;z为汽车的转动惯量。
根据Ackermann转角关系,有:
为了能够更准确验证控制算法的有效性,八轴车的整车动力学模型采用ADAMS软件建立。在ADAMS环境中建立38个自由度的整车动力学模型,整车模型包括簧上质量的6个自由度,16个悬架的自由度,16个车轮的自由度,采用UA轮胎模型。
该八轴电驱动车辆配备16个轮边电机,通过轮边减速器降速增扭进而驱动各车轮。
3 控制策略与控制器的设计
根据直接横摆力矩的控制思想,该多轴车辆为各轮独立电驱动结构,可根据各轮独立可控的优点实时调整各轮驱动力矩,以保证车辆安全稳定行驶。图2为控制系统结构,驾驶员模型根据车辆的行驶状态调整方向盘转角和油门踏板开度,油门踏板开度决定了整车输出功率,由此确定各轮输出的初始驱动力矩T0,当整车的质心侧偏角和横摆角速度与理想值偏差过大时,上层控制器计算出纠正偏差需要的横摆力矩,由下层控制器按照相应的驱动力分配算法分配至各轮,得到各轮驱动力矩的调整值ΔT,T0与ΔT之和即为各轮实际输出驱动力矩,方向盘转角与各轮驱动力矩输出至整车模型,整车实时运行状态通过传感器获得,经过处理计算反馈至各层。
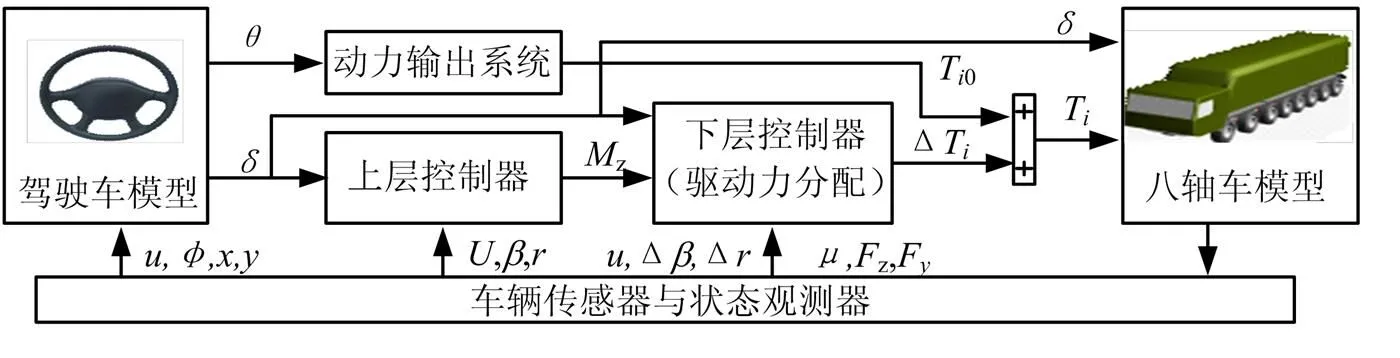
图2 稳定性控制系统结构示意
3.1 上层控制器设计
上层控制器以驾驶员给定的方向盘转角、车速、车辆的质心侧偏角和横摆角速度作为输入,经控制算法得到横摆力矩,输出至下层控制器。
图3为上层控制器结构原理,由整车理想模型、前馈控制器和反馈控制器组成。整车的理想模型由方向盘转角和当前车速确定,根据车辆达到理想状态所需的横摆力矩确定前馈控制器,反馈控制器基于线性二次型最优控制算法对车辆的质心侧偏角和横摆角速度误差进行纠正。

图3 上层控制器结构原理

a)控制系统模型。
若给车辆一个附加的横摆力矩z来控制车辆的操纵稳定性:

将式(1)、式(2)简化,得:


将式(5)、式(6)写为状态方程的形式,有:

即:

将式(5)、式(6)进行拉普拉斯变换,得:


b)前馈补偿控制器设计。
前馈控制器是在车辆失稳之前对车辆运动姿态的一种提前预测,目的是使车辆的稳态质心侧偏角和横摆角速度趋于理想值。设计前馈补偿控制器,车辆的补偿横摆力矩ff与前轮转角的关系为

式中ff为前馈控制器的比例增益系数。
首先按照质心侧偏角确定的前馈控制系数:将 式(10)代入式(8),可得到稳态转向时,质心侧偏角对前轮转角的响应为

式中f0,0分别为稳态时的前轮转角及质心侧偏角。
理想的质心侧偏角大小可简化为

前馈横摆力矩控制的效果,应该使车辆的稳态质心侧偏角达到理想质心侧偏角,为此,使β=β,ff0,将式(12)代入式(11)可得:
再按照横摆角速度确定的前馈控制系数:将式(10)代入式(9),可得到稳态转向时,横摆角速度对前轮转角的响应为

理想的横摆角速度大小可简化为
将式(15)代入式(14)可得:

如果只按照质心侧偏角进行前馈控制,最终会使得前馈横摆力矩过大,使车辆的不足转向趋势过于严重,造成车辆严重偏离行驶轨迹;若只按照横摆角速度进行前馈控制,横摆力矩不足,使得质心侧偏过大。由于车辆的质心侧偏角和横摆角速度是相互耦合的,控制目标必须是两个能够同时达到的状态。因此设计不同权值变量的前馈控制器比例增益系数:

式中为ff1的权重系数,考虑多轴车辆的稳态质心侧偏角增益曲线接近于二次函数,因此定义为关于车速的二次函数进行拟合,=2。
c)DYC控制的车辆理想模型。
将式(10)代入式(9),可以得到横摆角速度的理想传递函数:

将式(10)带入式(8),可得到理想的质心侧偏角的传递函数:

可得理想模型的状态方程为
d)反馈控制器的设计。
应用线性二次型最优控制算法设计反馈控制补偿器,反馈控制器中实际质心侧偏角和横摆加速度与理想值的偏差为

则,
将式(7)和式(20)带入式(21),可得:

式(22)第3项为前轮转角引起的干扰项,令其为零,则偏差方程可进一步简化为

应用线性二次型最优控制算法求解反馈补偿增益。设反馈控制系统中的反馈控制力矩为

式中fb1和fb2为实际车辆模型与理想模型的状态偏差反馈增益。
设最小化性能指标函数为

通过线性二次型最优控制算法,求解Riccati方程可得到反馈控制器反馈增益。
因此,总的附加横摆力矩为
3.2 下层控制器设计
通过上层控制器计算得到纠正车辆姿态所需的横摆力矩后,建立相应的驱动力分配算法将驱动力分配至各驱动轮。各轮驱动力的调整量ΔFa是根据横摆力矩确定的,对不同侧车轮的驱动力做相反方向的调整。
横摆力矩分配的原则为:在没有车轮打滑时对各轮驱动力的调整量按照平均分配原则,从而保证对各轮驱动力最小的调整量;若在平均分配原则下出现打滑车轮,则对各轮驱动力的调整量改为按照各轮垂向力的比值分配,以防再次出现打滑车轮;若按照比值分配后仍然出现车轮打滑,则打滑车轮按照当前最大附着极限分配驱动力,未打滑车轮驱动力调整量仍然按照各轮垂向力的比值分配,但必须保证总的横摆力矩;最大分配驱动力超过电机所能输出极限时,该轮驱动力按照电机所能提供值分配,驱动力不足部分由其他未打滑车轮提供。
a)各轮驱动力调整方向的判定。
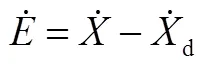
车辆在小转向角度发生失稳时,横摆力矩的控制中仅对左右两侧车轮进行区分即可。但在较大转角情况下,前轮或后轮的内侧车轮形成的横摆力矩方向改变,以整车右转为例。图4为该车处于最大转角时的示意,其中ΔLia和ΔRia为左右侧车轮的驱动力调整量。可以看到,在最大转角时1、2、8轴内侧车轮绕质心的横摆力矩力臂在质心左侧,形成的横摆力矩方向与外侧车轮相同,因此在最大转角下调整横摆力矩时,这3个车轮的驱动力调整方向应保持与外侧车轮一致,从而保证用最小的驱动力调整量形成最大的横摆力矩。
当内侧前轮转角从0逐渐增加到最大时,1,2,8轴内侧车轮延长线依次越过质心偏向另一侧,其驱动力调节方向发生改变。
图4 最大转角时内侧车轮绕质心力臂示意
b)通过横摆力矩分配各轮驱动力。
定义横摆力矩z沿顺时针旋转方向时为正,前轮右转为正,通过各轮驱动力调整量形成的横摆力矩为
式中 ΔLia和ΔRia为左右侧车轮的驱动力调整量,驱动力增加为正,驱动力降低为负;Li和Ri为左右侧车轮驱动力在整车质心处形成的力臂,当第轴车轮的力臂与同侧车轮力臂不相同时为负,相同时为正。

式中和分别为左右两侧车轮的力臂系数,当第轴车轮的力臂与同侧车轮力臂不相同时取1,相同时取2,式中ΔLia0和ΔRia0均为正值。
当内侧前轮转角1不为0时,轴内、外两侧轮转角为

式中分别取1,2,3,7,8;15,25,35为正;75,85为负。
轴内、外两侧轮力臂分别为

式中为轮距。
因此,左右两侧车轮的力臂为

得到由横摆力矩确定的各轮驱动力的调整量ΔLia0和ΔRia0。
在没有车轮打滑时对各轮驱动力的调整量按照平均分配原则:

出现打滑车轮时,各轮驱动力调整量按照各轮垂向力的比值分配:
实验样车的整车驱动控制系统模型在Matlab/Simulink建模环境下建立,系统模型包括驾驶模块、初始力矩分配模块、差速控制模块、侧向稳定性控制模块、滑转控制模块等,如图5所示。

图5 Matlab/Simulink下整车驱动控制系统
4 仿真验证
为了验证所建立的稳定性控制系统的可行性,利用搭建好的整车机械模型和控制模型进行联合仿真验证。首先在附着系数=1.0、车速给定值35 km/h时,前轮转向角输入4°的转角阶跃函数,对施加控制和不施加控制力矩直接给定直接为初次分配值,分别进行联合仿真。横摆角速度和质心侧偏角的仿真结果如图6~8所示。由图6、图7可以看出,无控制作用时,横摆角速度和质心侧偏角实际值偏离理想值,存在波动;在控制作用下,车辆的横摆角速度与质心侧偏角均被控制在安全范围内,横摆角速度在偏离理想值 1.7 s后,被控制在安全范围内,超调20%左右,控制效果比较理想。而车速也略有下降后迅速保持原有速度。
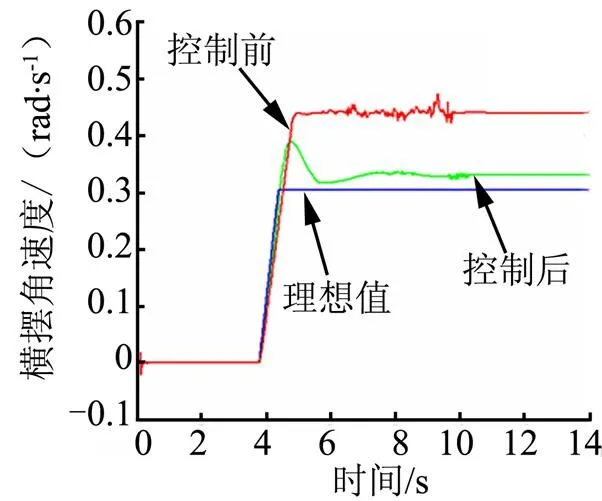
图6 横摆角速度响应
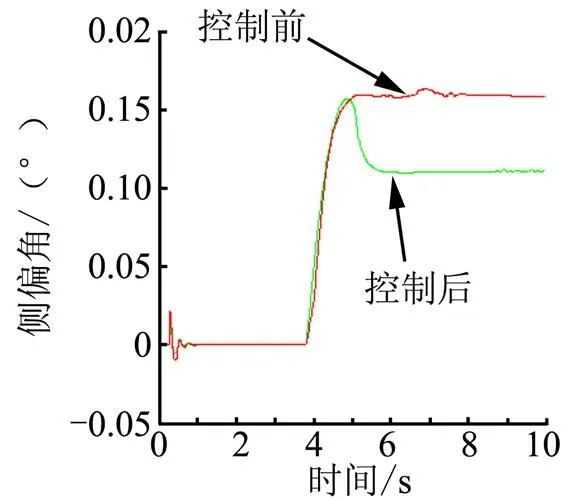
图7 质心侧偏角响应
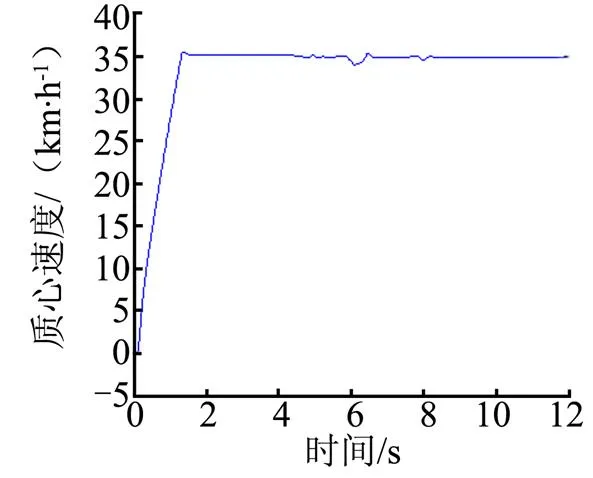
图8 质心车速仿真曲线
在附着系数=0.3、车速给定值35 km/h时,前轮转向角输入4°的转角阶跃函数,对施加控制和不施加控制分别进行联合仿真。横摆角速度和质心侧偏角的仿真结果如图9、图10所示。由图9、图10可以看出,无控制作用时,横摆角速度和质心侧偏角严重偏离理想值,车辆发生过度转向偏离理想轨迹,驾驶员已经无法较好地操纵车辆了;而在控制作用下,车辆的横摆角速度与质心侧偏角则被控制在安全范围内,控制效果比较理想。质心车速仿真曲线如图11所示,由于路面较滑,转向时进行控制引起的力矩变化使车速略有波动,但控制结束后恢复稳定。
由此可见,基于线性二次型最优控制理论的横摆稳定性控制系统性能较好,在保证稳态侧偏角为零的同时较好地跟踪了原有的横摆角速度。瞬态响应也有较好地改善,侧偏角峰值减小,横摆角速度响应迅速,较好地跟踪了驾驶员的转向意图。
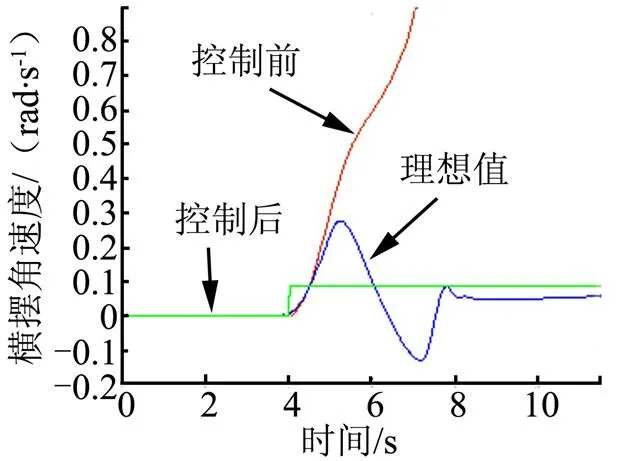
图9 横摆角速度响应
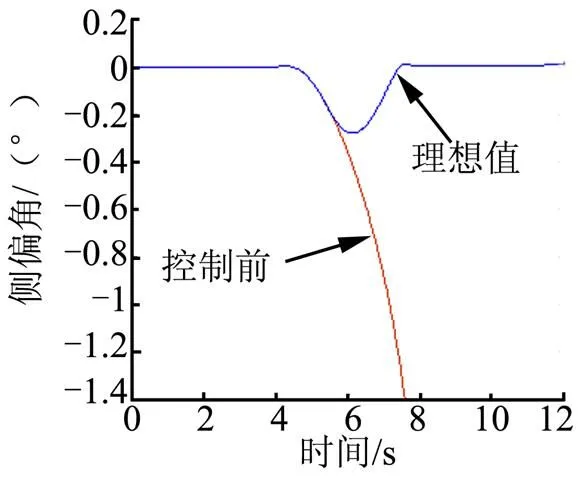
图10 质心侧偏角响应
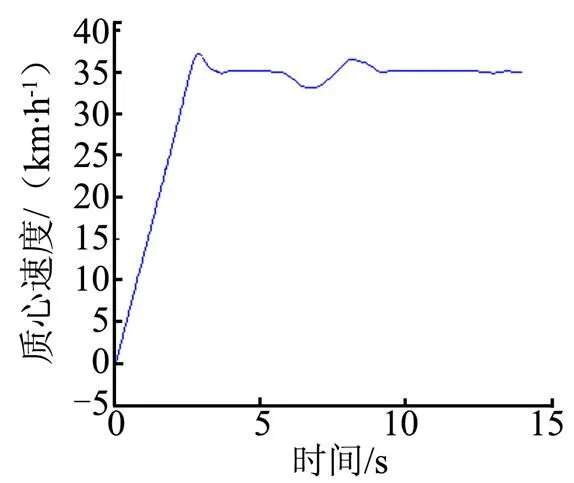
图11 质心车速仿真曲线
5 结束语
本文针对多轴电驱动重型车辆的结构特点,建立了电驱车辆的二自由度数学模型。应用前馈-后馈控制器,基于线性二次型最优控制算法,设计了基于质心侧偏角和横摆角速度的最优横摆力矩控制系统,以改善车辆的操纵稳定性。通过仿真分析,所设计的控制方式对整车的操纵稳定性具有良好的控制效果。
[1] Zanten A T V, Rainer E, Georg P.Control aspects of the Bosch-VDC[C]. RWTH Aachen: AVEC, 1996.
[2] 王德平, 郭孔辉, 宗长富. 车辆动力学稳定性控制的理论研究[J]. 汽车工程, 2000(1): 121-202.
[3] Azadzad N L, Khajepour A, Mcphee J. Analysis of jack-knifing in articulated steer vehicles[C]. USA: IEEE Conference on Vehicle Power and Propulsion, 2005.
[4] 汪建春. 铰接式车辆对扰动的瞬态和稳态响应(上)[J]. 矿山机械, 2008, 36(9): 26-29.
[5] 申焱华. 电驱动铰接式工程车辆操纵稳定性控制分析[J]. 农业工程学报, 2013, 29(12): 71-74.
[6] 何锋, 杨宁. 汽车动力学[M]. 贵州: 贵州科技出版社, 2003.
Study on Simulation of Yaw Stability Control ofMulti-axle Electric Driven Vehicle
Yang Song-pu, Zeng Guang-gui, Luo Zhi-wei, Wu Chun-yan
(Beijing Institute of space launch technology, Beijing, 100076)
With the increase of public’s safety awareness, the study of safety of vehicles has become an important part in vehicle research. Controlling of the vehicle yaw stability is an approach of active safety control which can effectively guarantee the lateral stability, hence the significance of the study of the control methods of yaw stability. Aiming on the features of multi-axle electric driven vehicle, this paper researches the strategy of control of yaw stability based on DYC (Direct Yaw-moment Control) theory by establishing vehicle dynamics model.Then the joint simulation was implemented under the typical test.The results illustrates that the control system designed can effectively improve the vehicle yaw stability.
Yaw stability control; Direct yaw-moment control; Joint simulation
1004-7182(2017)06-0082-07
10.7654/j.issn.1004-7182.20170618
U461
A
2016-07-25;
2017-10-31
杨松樸(1990-),男,助理工程师,主要研究方向为电力电子与电力传动