基于北斗卫星的森林资源信息外业采集系统关键技术研究
2018-01-25李成杰
李成杰,林 辉,臧 卓
(林业遥感大数据与生态安全湖南省重点实验室,湖南 长沙 410004)
准确而全面的信息是森林资源经营与管理过程中需要参考的重要依据,人工野外信息采集是获取森林资源信息的重要途径之一。信息采集工作正由指南针加纸质资料的传统方式逐渐过渡到移动智能终端辅助调查的现代化方式[1-2]。但是在野外信息采集过程中,工作者经常会进入无信号覆盖的通信盲区,致使采集人员在发现森林灾害(火灾、病虫害、气候灾害)或盗伐林木等紧急、突发情况时,无法快速进行信息通讯。同时,在林区进行信息采集工作时手持全球定位系统(Global Position System,GPS)或智能设备集成的GPS芯片经常会出现搜星慢、定位迟、偏移大等问题。
我国自主研制的北斗卫星导航系统,集短报文通信、定位导航、精密授时三大功能于一体:目前阶段的服务区为55°S~55°N、55°E~180°E区域,单点定位精度水平≤10 m、高程≤10 m,测速精度≤0.2 m/s,授时精度≤50 ns[3],单次短报文通信最多可传输240字节信息(120个汉字),最高通信频度每秒1次,全天时为北斗用户提供服务,且能够适用于复杂的林区环境,可有效解决森林资源信息采集工作中存在的盲区多、定位慢、应急反应能力弱等问题。目前,北斗卫星导航系统已经开始在林火应急指挥、林区巡护管理等林业工作中应用[4-8]。
本文立足于北斗卫星导航系统和前期研发的森林资源信息采集系统,针对短报文通信和定位导航两大主要功能进行学习研究,分析野外采集工作中特殊需求,将北斗技术更好地运用于森林资源信息采集。
1 基于北斗技术的森林资源信息外业采集系统
目前,森林资源信息采集系统大都基于森林资源连续清查(简称“一类调查”)和森林资源规划设计调查(简称“二类调查”)进行研究开发。现有的采集系统在深入分析两类调查工作的基础上研建,主要功能包括图层显示与控制、矢量编辑与计算、调查数据管理和GPS定位[1]。但是在林区内很多地方没有移动通讯信号,经常出现GPS搜星慢,定位迟、漂移大等现象,给林业调查工作者带来诸多安全隐患,在一定程度上限制了云服务、云计算等新技术在林业调查工作中的应用。本次研究利用北斗卫星导航系统的定位技术和短报文通信技术,解决森林资源信息采集中的定位与通信问题,设计并研发了基于北斗技术的森林资源信息采集系统。
1.1 系统架构
基于北斗技术的森林资源信息采集系统架构如图1所示。在北斗林业应用标准规范体系和林业应用安全保障体系的条件下,系统自上而下分为六层,即用户层、用户界面层、控制层、业务层、支撑层和统一数据访问通信层[9]。

图1 融合北斗技术的森林资源采集系统架构Fig.1 Combine forest resource collection system framework of BDS
用户层面向林业外业信息采集工作者。界面层包括图层显示界面、数据管理界面、编辑工具栏及应用工具菜单。控制层将各个功能模块的服务接口进行整理,使业务层各模块的颗粒度及模块间的耦合度达到较为平衡的状态,同时预留接口,为系统后续升级与维护提供方便;业务层则包括系统核心功能,将北斗定位与北斗通信功能封装入业务层,使其成为系统的核心功能之一。支撑层除Android、Java必备的运行库之外,还使用了GDAL、JTS开源库实现栅格、矢量数据的操作,而北斗设备的定位及通信功能则依赖于北斗设备的软件开发工具包加以实现。统一数据访问通讯层分为外部数据通讯和本地数据访问两部分:本地数据主要包括SQLite数据库、栅格文件、矢量文件;外部数据通讯则由网络和北斗短报文实现林区通信,由蓝牙实现智能终端到蓝牙BDS、GPS等设备的通信功能。
1.2 功能模块
根据森林资源信息采集业务的需求,本系统主要包括图层操作、矢量编辑、数据管理、定位导航、应用工具5个主要模块(如图2所示)。

图2 系统功能模块Fig.2 System function module
其中,图层操作、矢量编辑和数据管理是移动GIS的基础功能,不再加以赘述。本次研究主要将北斗技术运用于定位导航和应用工具两个模块。
定位导航模块:已有的森林资源信息采集系统大都基于智能设备内置的GPS定位芯片进行定位,经常会出现定位迟缓、偏移量大、信号丢失等问题,本研究利用北斗RDSS捕获信息快的特点,可以有效解决系统使用过程中首次定位慢的问题。并尝试结合智能设备固有的陀螺仪及罗盘仪进行步行者航位推算,可以在卫星信号丢失的时间段内持续为用户提供定位服务。
应用工具:主要包括轨迹记录、北斗短报文通信和图层管理3个子功能。其中北斗的短报文通信功能可以有效解决林区内无移动通讯信号覆盖的问题,并在一定程度上降低了野外工作者的安全隐患。其次,采集人员在发现紧急、突发情况时,可以利用北斗短报文通信功能及时与调度、管理部门取得联系,力争在最短的时间内采取应对措施,将损失降至最低。
2 短报文压缩技术
BDS区别于GPS的最大特点是其集定位、通信于一体。本次研究采用三级北斗民用智能卡和北斗一代终端数据接口4.0协议进行数据传输,单次通信最多可传输72字节信息(36个汉字),去除固定占用字节后最多可传输50字节信息(25个汉字),通信频度60 s 1次,系统可全天时为服务区内的北斗用户提供服务,且能够适用于复杂的林区环境,可有效辅助解决森林资源信息采集工作中存在的盲区多、应急反应能力弱等问题。
2.1 报文编码
在森林资源信息采集的外业工作中,有可能遇到各种突发、紧急甚至是危险的状况,此时若无移动通讯信号的覆盖,必须依靠北斗短报文技术进行卫星通信。因此报文内容必须用尽可能少的字数,传递尽可能多的信息,其主要内容必须包括坐标位置、消息类型、自定义内容三个方面。
(1)坐标位置
坐标位置是电文的关键信息,不能为空。可以直接用于确定用户目前的位置,方便调度人员规划合理的援助路径,在最短的时间内到达目的点。因此,必须确定合理的坐标类型及格式。考虑到坐标通用性和获取坐标的便捷性,筛选出3种坐标格式(如表1所示),其中UTM投影坐标合并后长度稳定,其余2种坐标长度会随着位置的变化而发生变化。但是,十进制度坐标可以直接依靠定位设备获取,度分秒和UTM投影坐标都是在十进制度的基础上进行解算,而在已有软件当中也是直接利用十进制度进行定位显示,所以综合考虑,电文的坐标部分采用合并后的十进制度进行发送,占用长度15~17个字节。
(2)消息类型
消息类型是电文的标志性信息,不能为空。接收端程序可以直接通过解译消息类型代码,对消息进行归类,以最快、最佳的方式呈现给消息接收者,而无需接收者在阅读消息后再加以判断。电文类型及代码如表2所示。首先将消息类型分为森林灾害类和其他类,在森林灾害类消息中,从左至右,首位不为零的数字表示灾害类型,第二位数字表示灾害严重程度(如代码32表示中度森林气候灾害);在其他消息类型中,从左至右首位数字为0,表示其他类消息,第二位数字表示具体消息类型(如代码00表示紧急求救信号)。

表2 电文类型及代码Table 2 Test types and code
(3)自定义内容
自定义内容是电文的主要部分,用于描述相关的具体信息,类似于日常生活中所发送的短信等,自定义内容可以为空,也可以定义选择常用的消息语句。
报文具体编码流程如下:首先,将十进制度坐标进行去符号拼接,转化为16进制字符串,然后对16进制字符,串进行压缩并转为字节型数组;对于消息类型和内容组成的部分,因为其中会含有中文字符,所以须将其转换为GBK编码,之后将编码构造为字节型数组。最后,将前后两部分字节型数组进行拼接,转换为16进制后拼入通信申请指令,通过北斗蓝牙设备发送给北斗卫星。
2.2 报文压缩
短报文通信是利用卫星、地面站及用户机进行数据传递,但目前北斗卫星导航系统尚处于组网阶段,可用资源有限,所发消息必须以尽可能短的长度,发送尽可能多的内容,因此需要对消息进行压缩编码。
压缩采用固定位长算法,把文本需要占用的最少的位来进行压缩编码。例如,八个十六进制数:1,2,3,4,5,6,7,8。转换为二进制为:00000001,00000010,00000011,00000100,00000101,00000110,00000111,00001000。 每个数只用到了低4位,而高4位没有用到(全为0),因此对低4位进行压缩编码后得到:0001,0010,0011,0100,0101,0110,0111,1000。然后补充为字节得到:00010010, 00110100,01010110,01111000。所以原来的八个十六进制数缩短了一半,得到4个十六进制数:12,34,56,78。
压缩前坐标部分所占15~17个字节,因为长度可变,所以需加入分隔符用于分割坐标部分,消息类型占用2个字节,所以剩余部分仅允许用户输入15~16个汉字,大幅降低了报文的信息量,电文各部分压缩前后对比如表3所示。
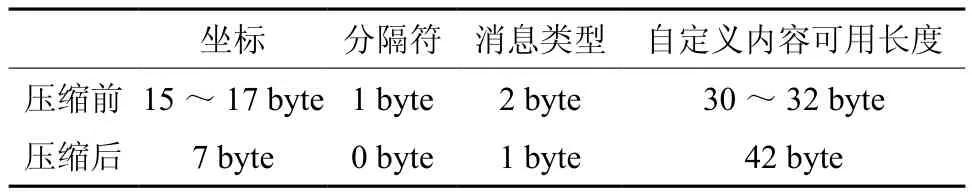
表3 电文主要内容压缩前后比较Table 3 Comparison of main message content before and after compressed
压缩后坐标部分仅占用7个字节,同时在压缩过程中以最长长度为标准,不够长度的坐标在其头部补位的方式,将其长度固定在7个字节,因此再无需采用分隔符标识。在消息类型编码的过程中将两位的十进制代码以1个英文字母表示(区分大小写),只占用一个字节,压缩率达到40%。因此在自定义消息内容中有42个字节长度可用,最多可输入21个汉字,相比压缩前可多输入5~6个汉字,有效提升了北斗短报文的信息载荷。
3 定位技术
本研究采用北斗一代终端设备,没有内置GPS定位芯片,所有定位结果均来自于北斗卫星导航系统。北斗一代双星系统由位于地球静止轨道的两颗同步卫星、一颗在轨备份卫星、中心控制系统、标校系统和各类用户机构成。通过三球交汇原理实现空间三维坐标求解,采用RDSS有源定位技术,其具备捕获快、获得时间信息快的特点[9-13]。
3.1 返回定位结果处理
因北斗一代采用RDSS有源定位技术,所以每次定位需向卫星发送定位申请,且有一定的频度限制。当定位申请成功发出后,会收到成功、失败、信号未锁定、发射被抑制、发射频度未到、加解密错误、CRC错误、用户机被抑制、抑制解除9种反馈标志,当定位成功时,智能终端会接收到蓝牙设备传回的RDSS定位信息(如表4所示)。

表4 北斗蓝牙设备向智能终端返回RDSS定位信息Table 4 Beidou bluetooth device returns the RDSS location information to the intelligent terminal
RDSS定位信息由包头、数据内容、包尾三部分构成,在提取数据内容前必须进行校验和比对,以确认数据的正确性与完整性,当校验和比对无误后,开始解析数据内容,位置数据的内容结构如表5所示。

表5 位置数据内容结构Table 5 Location data content structure
对位置数据按结构进行解译后,即可获得WGS-84坐标下的经、纬度及高程信息。当移动智能终端开启模拟位置服务后,北斗RDSS定位结果不仅是一串数字,同时可以为设备提供定位服务。
由于本次实验采用三级北斗民用智能卡,通信频度60 s 1次,所以定位结果60 s返回一个,考虑到林区地况复杂,而两次定位时间差过长,所以尝试使用智能设备固有的陀螺仪及罗盘仪进行步行者航位推算,旨在GPS信号丢失或通信频度限制的时间段内持续为用户提供定位服务。
3.2 定位时间统计
“北斗一代”采用RDSS有源定位技术,其具有捕获卫星快、定位时间短的优势。实验采用BDS蓝牙设备和两台携带GPS定位芯片的智能终端,在开阔地区进行首次定位时间测试,所有数据均是在设备开机、断网后首次获得位置所需要的时间,结果如图3所示。

图3 首次定位用时间Fig.3 First positioning time
由图3可以看出BDS设备首次定位耗时最短,平均用时4 s;GPS1为智能手机,平均用时13 s;GSP2为平板电脑,平均用时86 s。综上可知,BDS设备首次定位时间最短,有效解决了智能终端内置GPS芯片搜星慢、定位迟的问题。
4 定位误差分析及处理
“北斗一代”为主动定位系统,尤其在低纬度地区定位效果不理想。总体表现为经度变化对定位结果影响较小,纬度变化对定位结果影响较大,呈现自北向南定位误差逐渐增大的态势[13]。因此,系统开发过程中在试验区域内,需要对北斗RDSS定位结果进行误差分析,并做出相应的处理。
与GPS相同,刚开机后的一段时间内,定位结果变动幅度较大,精度相对较低,定位结果不稳定,因此,首先需要测试定位精度随定位时间变化的趋势[14]。测试随机选择4 d,且天气状况有所差异,并每天任意挑选一个时间段进行十分钟的定位测试,测试结果如图4所示。结果表明在开机定位3 min后结果相对稳定,所以后续测试将采用从定位开始3 min后的10个点进行分析及处理。

图4 定位精度随时间的变化Fig.4 Positioning accuracy by time change
测试控制点的参考值使用GEOMAX Zenith15 Pro GPS,结合SBAS差分获取结果,定位精度2 cm,能够很好地满足本次测试的需求。每个控制点观测13 min以上,记录后10个定位结果,并求均值,控制点参考值及观测均值如表6所示。

表6 参考值与观测值均值Table 6 The reference value and the observed mean
观测均值与参考值的残差如图5所示。从图5中可以明显看出y方向残差全部为正,x方向残差全部为负,且三类残差趋势基本相同;x方向残差值较小,位于0~10 m之间;y方向和点位残差较大,位于15~30 m之间;并且点位残差主要受由y方向残差影响,两者数值相近,最大处小于2.32 m。由此可知定位结果相对于真实位置向东南方向偏移,且南方偏移量较大,东方偏移量较小。

图5 观测均值残差Fig.5 The observed mean residual
由于其定位结果呈现东南方偏移的态势,决定采用直接校正和四参数坐标转换两种方式进行定位偏移处理。直接校正模型如公式(1)所示,求解x方向及y方向的平均偏移量ΔX、ΔY后,对于定位结果坐标进行加偏处理,使其尽可能靠近于真实地点,此方法仅适用于较小的范围。

另一种方式是采用四参数进行坐标运算,即x方向、y方向的偏移量ΔX、ΔY,旋转角度α及尺度比参数因子K,为了解算唯一的参数值,在转换过程中,至少需要两个公共点的坐标,数学模型如式(2)所示。
当参数求得后,通过查看K是否处于(0.97,1.03)区间,判断转换参数质量的高低[15]。两种转换方式参数如表7所示,此处K值满足条件,可以使用四参数进行转换。

表7 转换参数Table 7 Conversion parameter
利用表7中参数进行两种方式的坐标转换,四参数转换结果残差如图6所示。x方向及y方向的残差均匀分布于垂直方向的正负半轴。定位误差位于2.0~6.4 m之间,相对于原始状态提升了10~25 m,转换效果理想。

图6 四参数转换结果残差Fig.6 The result residuals of the four parameters
校正转换结果如图7所示。x方向及y方向的残差均匀分布于垂直方向的正负半轴。定位误差位于2.7~5.6 m之间,相对于原始状态提升了11.6~23.7 m,转换效果理想。

图7 校正转换结果残差Fig.7 Correction of the result residuals
由两种转换结果得知四参数转换最小误差仅2.04 m,最大误差6.39 m;校正转换最小点位误差2.63 m,最大点位误差5.51 m。相比之下校正转换结果误差区间较小,转换结果稳定。而四参数转换对转换参数有一定要求,为达到条件,未能运用全部数据进行四参数求解,例如,图6中6号点,未参与坐标转换参数求解,所以其转换后的误差最大,达到6.93 m;而在校正转换中偏移量参数ΔX、ΔY采用平均数进行求算,所以对转换结果影响较小。
5 结 论
本研究将北斗短报文技术和RDSS定位技术运用于林业信息采集,研究设计了林业信息采集类业务的短报文编码,分析了北斗RDSS定位误差大小并运用四参数转换和校正转换对定位点进行纠正,现有如下结论:
(1) 运用字符串转码压缩技术和固定位长度算法,将原本占用18~20字节的坐标信息、消息类型信息和分隔符压缩至8个字节,压缩率40%,节省出10~12个字节,可多传输5~6个汉字,在短报文长度一定的前提下,有效提升了报文信息载荷,可有效解决信号盲区林业调查无应急通讯的问题。
(2) 在测试区域内,北斗RDSS定位首次定位仅需4 s,校正前平均定位误差22.2 m,校正后平均定位误差10 m,达到森林资源调查所需精度(<10 m),可较好地辅助移动智能终端进行定位,解决智能设备定位慢、信号易丢失等问题。
(3) 将北斗技术应用于森林资源信息采集系统,可以有效提高森林资源调查工作效率,降低野外工作隐患。
6 讨 论
现阶段,北斗卫星导航系统主要应用于森林消防和巡护管理两方面。在森林资源调查领域还没有将北斗卫星导航系统的两项技术有效结合的先例,因此,本研究具有一定的先进性。
由于部分调查地林区地况复杂,本文尚未研究地形、郁闭度等其他因素的变化对北斗短报文通信及RDSS定位的影响。测试区域均处于路旁、下坡位、平地等相对空旷地带,需要在今后的研究中考虑多因素对北斗短报文通信及RDSS定位的影响。
本次坐标纠正采用四参数转换和校正两种方式,其中校正转换结果相对稳定,且较容易实现,但是仅适用于小区域内的坐标转换,例如本次测试结果。四参数坐标转换对于参数计算要求较高,需选用相对精准的控制点进行解算,其适用范围较广。因此,需根据不同的定位范围,挑选合适的坐标转换方法,力求将误差降至最低。由于北斗一代采用RDSS有源定位方式,其定位精度较低,虽然可以进行坐标校正,但需要依靠参考值计算转换参数,操作步骤相对繁琐,考虑到目前北斗二代正在进行推广试用,在后续研究中将使用北斗二代定位或BDS、GPS、GLONASS多模组合定位的方式,同时对短报文的业务类型进行扩展,使其可以运用于更多复杂场景。
[1]查东平, 林 辉, 孙 华,等. 森林资源信息外业采集移动平台关键技术研究[J]. 中南林业科技大学学报, 2012,32(9):32-36.
[2]Liu W, Wang S, Zhou Y,et al.An android intelligent mobile terminal application: fi eld data survey system for forest fi res[J].Natural Hazards, 2014, 73(3):1483-1497.
[3]中国卫星导航系统管理办公室.北斗卫星导航系统简介.北斗卫星导航系统,2010-01-15.http://www.beidou,gov.cn/xt/xtjs/.
[4]农肖肖. 基于北斗卫星导航系统的野外地质调查应急救援系统的设计与实现[J]. 地矿测绘, 2015, 31(4):7-10.
[5]姜文龙, 刘楷鹏, 韩 宁,等. 基于北斗卫星通信的森林火灾监测系统[J]. 吉林师范大学学报(自然科学版), 2015,36(3):84-87.
[6]中国卫星导航学术年会组委会.第三届中国卫星导航学术年会电子文集——S01北斗/GNSS导航应用[C]//侯春青, 张凤珊, 孙 宏,等. 基于北斗的森林防火监测和应急指挥系统研究. 2012.
[7]黄 颖, 唐小明, 黄水生,等. 林业野外巡护采集信息北斗短报文编码设计及应用[J]. 中南林业科技大学学报,2014,34(8):106-110.
[8]胡 鸿,杨雪清,吴东亮.基于北斗位置服务的森林管护及系统研发[J].中南林业科技大学学报,2017,37(9):12-19.
[9]刘鹏举. 北斗林业示范应用框架与技术[J]. 卫星应用,2016(2): 53-58.
[10]马卫华, 袁建平, 罗建军. “北斗”系统低纬度区域定位精度增强方案探讨[J]. 全球定位系统, 2005, 30(3):46-50.
[11]姜 萍, 戎文强, 孙 健. 北斗二代RDSS与RNSS组合技术分析及应用实例[J]. 数字通信世界, 2013(S2):22-24.
[12]张 明, 顾晓雪. 北斗接收机定位误差分析[J]. 电子与封装,2015(9):40-43.
[13]张德欣, 于 鹏, 李 鹏,等. 北斗一代用户机定位精度分析[J]. 无线电工程, 2012, 42(10):33-35.
[14]谭 伟, 王开琳, 罗 旭,等. 手持GPS在不同林分下的定位精度研究[J]. 北京林业大学学报, 2008(S1):163-167.
[15]赵飞燕, 刘宝锋, 李 飞. 四参数坐标转换的方法及应用[J].地理空间信息, 2016, 14(7):71-72.
