电动助力转向控制策略研究
2018-01-24魏健楠段敏
魏健楠,段敏
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
引言
汽车转向系统有机械转向系统、液压助力转向系统、电液助力转向系统和电动助力转向系统。带有机械转向系统车辆完成转向主要依靠驾驶员手力,没有其他助力装置;液压助力系统主要依靠液压助力和驾驶员手力共同完成车辆转向;电动转向系统依靠助力电机协助驾驶员完成转向,相对于液压系统取消油泵、油管和油罐等装置,减小燃油消耗和环境污染。
电动助力转向系统性能主要由两方面决定,一方面助力特性曲线,良好助力特性曲线可以在车辆低速时提供较大助力减小驾驶员手力的消耗,高速时又保持较好路感;另一方面系统控制策略,鲁棒性较好控制策略可以提高助力电机电流跟随性,改善转向系统动态特性。本文主要采用PID和模糊PID两种控制策略进行对比,验证两种控制动态特性。
1 EPS建模
通过对EPS系统受力分析,简化系统如图1所示,其中主要组成部件有方向盘、扭矩传感器、ECU、助力电机、减速机构,转向器和上下转向柱等等。
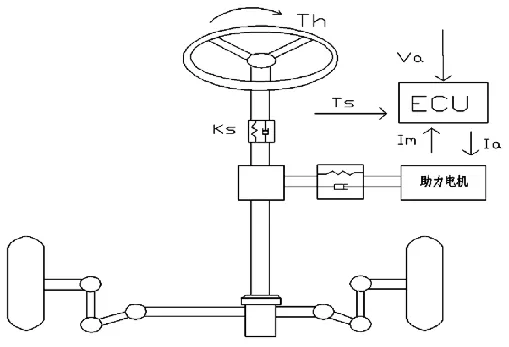
图1 EPS结构简图
EPS建模主要分为数学建模和 Matlab/simulink仿真建模,数学建模有以下四个部分。
针对方向盘和上端转向柱建模:

在式中,Jh和Bh为方向盘和上端转向柱的等效转动惯量和阻尼;KS为扭矩传感器等效扭杆的刚性系数;θh为驾驶员转动方向盘的转角;TS扭矩传感器检测到扭矩;Th为施加方向盘上的扭矩。
针对助力电机建模:

其中Jm、Km和Bm电动机和减速机构等效转动惯量、刚度和阻尼,U为控制器输出电压,R、L、Kt、Kf、I、θm、Tt分别为助力电机电阻、电感、电磁转矩系数、反电动势系数、电流、转向角、电磁转矩,G助力电机传动比。
针对下端转向柱和转向器建模:

其中Mr、Br和Kr为齿轮齿条和输出轴等效质量、等效阻尼和等效刚度;Xr齿轮齿条的位移量;rp为小齿轮半径。
通过上述数学模型建立Matlab/simulink仿真模型如图2所示。

图2 EPS仿真模型
2 EPS控制策略
本文选用两种控制分别为PID控制和模糊PID控制,对比两种控制策略目标电流动态特性。
2.1 PID控制策略
PID控制如图3所示主要包括三部分,分别是比例部分、积分部分和微分部分,比例Kp主要作用加快系统响应速度和提高系统精度,Kp越大系统响应速度越快,但是过大Kp会引起系统不稳定;Ki作用是消除系统稳态误差,Ki越大系统误差消除越快,但是 Ki过大会引起系统超调;Kd主要作用衰减系统震动,Kd过大会延长响应时间。PID参数设置一般采用拼凑法。PID控制目标是目标电流和助力电机实际电流差值,其中Ia为目标电流、Im为助力电机电流和电流差e。

图3 PID控制策略
2.2 模糊PID控制策略
由于PID不能在线整定参数功能,所以在PID基础加入模糊控制,模糊PID控制器以目标电流和助力电机电流的差值和差值变化率为控制策略输入,可以满足不同时刻对e和ec参数调节,得出模糊PID控制策略结构如图4所示[1]。

图4 模糊PID控制
模糊PID主要控制目标电流和助力电机电流差值e和电流差值变化率ec为输入,ΔKp和ΔKd为控制策略输出,Δ Kp、ΔKd、e和ec模糊子集{NB,NM,NS,ZO,PS,PM,PB}分别代表{负大,负中,负小,零,正小,正中,正大}模糊论域[-3,3],图5是模糊PID控制原理图[2]。
通过查阅相关参考文献和仿真实验得到相关参数取值范围:
其中 e:[-30,30];ec:[-30,30]
量化因子:Ke=0.1;Kec=0.1
比例因子:Gkp=4;Gkd=0.03

图5 模糊PID控制原理
根据PID和模糊控制原理设计模糊PID控制规则表,表中分别代表ΔKp和ΔKd。
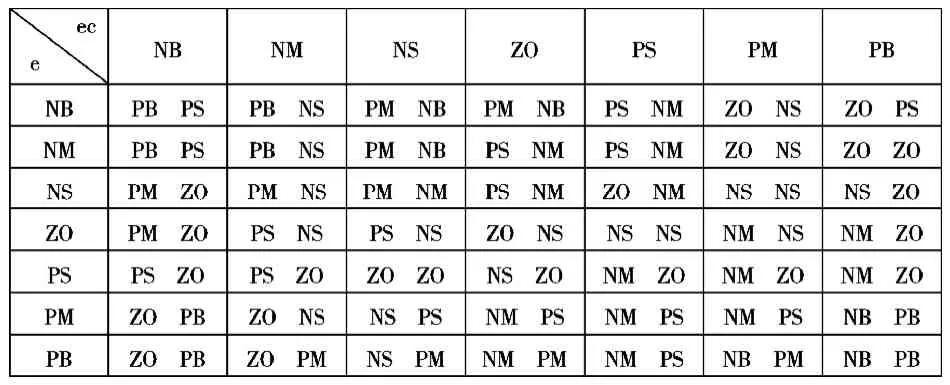
表1 模糊PID控制规则表
3 仿真结果分析
车速等于0km/h施加方向盘Th=7时,分析助力电机电流动态特性。

图6 控制策略对比图
从图6可以看出当采用两种控制策略相对于没有采用控制策略时稳态误差明显减小,响应时间也有所提高。对于PID和模糊PID控制策略,模糊PID超调量比PID有所改善,达到稳态电流值更快。
4 结论
对电动助力转向系统进行分析,简化EPS系统结构图和受力分析,导出数学模型和Matlab/simulink仿真模型。对比无控制、PID控制和模糊PID控制助力电流动态特性,仿真结果表明:采用控制策略明显减小稳态误差,而且模糊 PID控制更优于传统PID,减小超调量和缩短达到稳态电流时间,因此模糊PID比PID动态特性更好。
[1] 王雄波.基于模糊控制的电动助力转向系统的研究与开发[D].湖南大学,2008.
[2] 周冬林.电动助力转向系统仿真及控制系统设计[D].南昌大学,2009.
