电动助力转向系统控制策略和仿真技术的研究
2018-01-24潘国栋段敏王清
潘国栋,段敏,王清
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
前言
汽车是我国经济支柱产业,人们对汽车安全性越来越重视,汽车是一个复杂整体,转向系统是汽车重要组成部分之一。电动助力转向特性主要包括转向轻便性、操作稳定性和安全性。改进助力转向特性是电动助力未来的发展方向,主要包括两个方面,其一是对电动助力曲线进行改善,其二是改进系统控制策略,从而提高转向系统特性。本文主要对模糊PID联合控制策略进行了研究,通过建模和仿真来说明模糊和PID联合控制的优越性。
1 电动助力系统结构和工作原理
电动助力转向系统主要由方向盘、助力电机、减速机构、扭矩传感器、车速传感器、ECU等组成部分构成。驾驶员驾驶汽车时,转动方向盘,ECU接受速度传感器和扭矩传感器发送的信号,并根据预先存储在ECU中助力曲线,计算出相应的电信号,发送给助力电机,助力电机根据电压信号产生相应的助力,该助力经过减速机构作用于转向柱,驾驶员转动方向盘的扭矩和助力电动机产生的助力叠加在一起,克服地面作用在轮胎产生阻力和电动助力转向系统内部阻力。从而达到汽车转向的目的。
2 电动助力转向系统的模型分析
对物理模型进行受力分析,推导出相应的数学模型,根据数学模型在 Matlab/Simulink中搭建相应的电动助力系统仿真模型,为控制策略研究提供相应的仿真模型基础。本文主要是在建模基础上,对控制策略进行分析,简化模型复杂程度,可以提高试验便利性和准确性。把图1中双侧轮胎到齿条端简化成线性弹簧,并且认为弹簧另一端固定不动,所以轮胎和弹簧简化成一个共同质量为Mr[1]。
数学模型主要包括:方向盘和转向柱输入轴模型(式1-2),助力电机和减速机构数学模型(式 3-5),和转向柱输出轴和转向器数学模型(6-7)。

在式中,Jw和 Bw为方向盘和转向柱输入轴的等效转动惯量和阻尼;Ks为扭矩传感器等效扭杆的刚性系数;θw为驾驶员转动方向盘的转角;Ts为输入轴上转矩;Td为驾驶员施加方向盘上的转矩;Jm、Km和 Bm助力电机和减速机构等效转动惯量、刚度和阻尼;θm为电机的转角;Tt为助力电机总的磁力转矩;R、I、U和L为助力电机的电阻、电流、电压和电感;Kf为助力电机的电动势系数;Kt为助力电机转矩系数;Im为减速机构传动比。Mr为齿轮齿条和输出轴等效等效质量;Br为齿轮齿条和输出轴等效阻尼;Kr为等效刚度;X齿轮齿条的位移量;rp为小齿轮半径;Tn为电机实际作用在转向轴的转矩。
根据上述推导出数学模型在Simulink搭建仿真模型如图2所示。
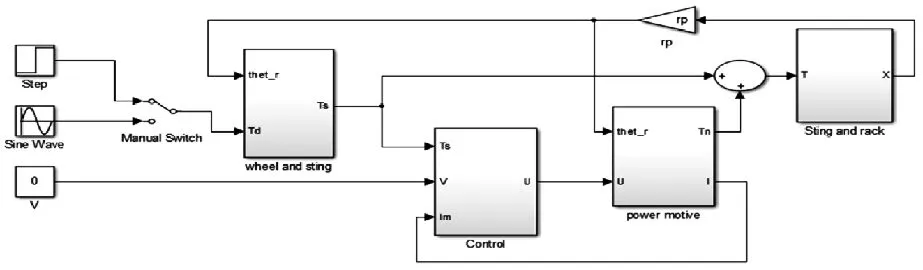
图2 Matlab/simulink仿真模型
3 电动助力转向系统助力曲线
目前助力特性曲线主要三种,分别是直线型助力曲线、折线型和曲线型助力曲线。本文采用曲线特性方法:利用Matlab中Fuzzy工具建立一个以扭矩传感器Ts和车速传感器V作为输入信号,经过模糊化、模糊推理和反模糊化确定目标电流Ia作为输出变量[2]。通过这种方法设计助力特性曲线,具有调整方便和实时性好等优点。通过模糊控制确定助力特性曲线原理(如图3),助力特性曲线模糊规则(如表1)。
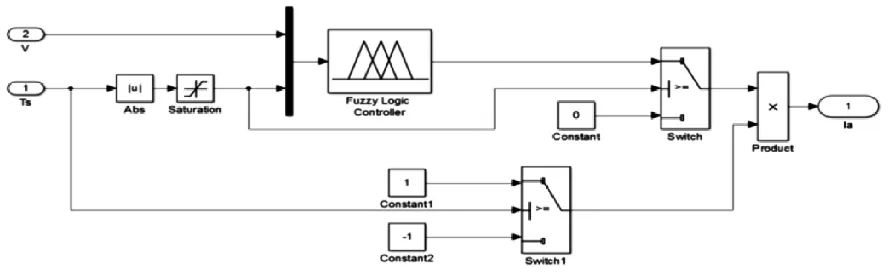
图3 模糊控制原理图
扭矩论域设定为(1,8)、车速论域设定为(0,80)和目标电流论域设定为(0,20)。模糊语言设定为(Z,QS,S,M,B,QB,GB),表示(零,相当小,小,中等,大,相当大,最大)。
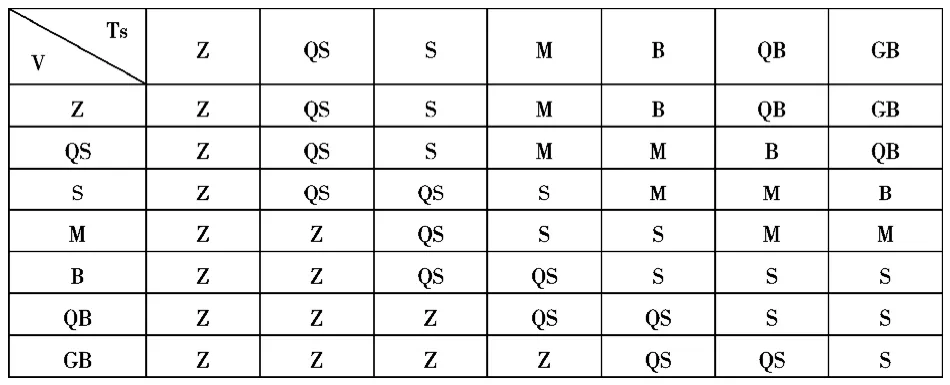
表1 助力特性曲线模糊规则表
4 电动助力控制策略分析
本文主要采用闭环PID控制策略(如图4),该控制策略结构简单,参数调节比较快速和简单,如今已经成为应用较为广泛的控制策略之一,PID控制主要有三部分组成,分别是比例(Kp),积分(Ki)和微分(Kd)组成。Kp大小提高了控制策略效应速度,Kp越大响应速度越快,过大可能引起系统超调和震荡;Ki作用是消除助力特性曲线的目标电流和电动机反馈的实际电流稳态误差,Ki越大稳态误差消除的速度越快,过大会引起积分饱和和超调。Kd作用提高系统响应速度,过大会引起系统反应速度过慢和降低系统的干扰能力[3]。
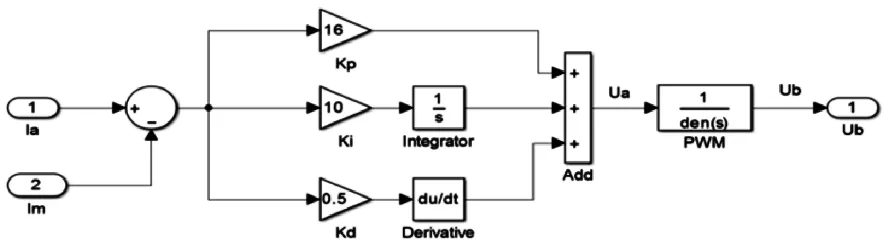
图4 PID控制策略
其中Ia为模糊控制确定目标电流,Im为电动机实际电流,当Kp=16,Ki=10,和Kd=0.5时实际电流跟踪效果达到最好。
5 仿真结果分析
方向盘输入Td为8N.M阶跃信号时,车速分别为V=0,20,40, 60, 80km/m时助力特性曲线(如图5)。
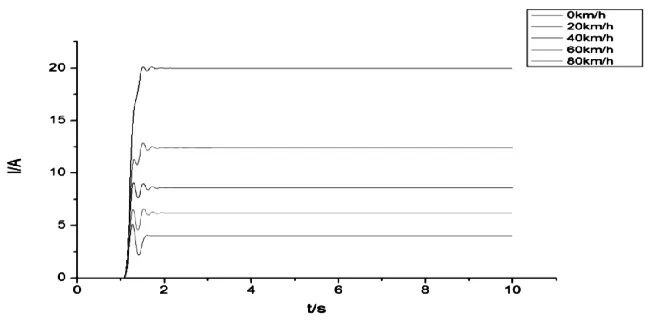
图5 助力特性曲线
从图5可知,在车速为0时,提供助力最大,随着速度增加助力电机给驾驶员提供助力随着减小。减小低速行驶时驾驶的疲劳和提高了高速行驶路感,从而提高车辆行驶的安全性。
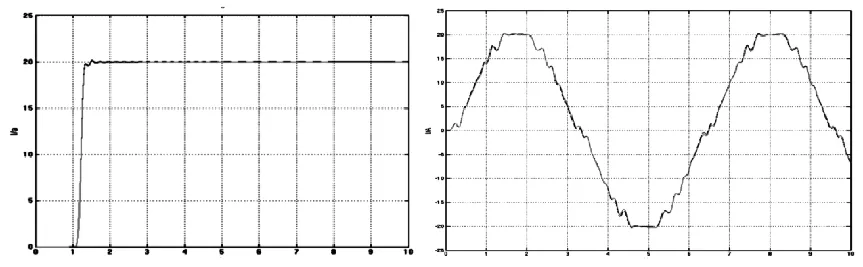
图6 电动机实际电流和目标电流对比图
当车速0km/h时,给方向盘一个8N.M阶跃和正弦信号,助力电机实际电流和目标电流如图6所示。
从图6可知,当方向盘输入正弦信号和阶跃信号时,电动机实际电流和模糊控制助力特性曲线输入目标电流达到了较好跟随性。
6 结论
通过对电动助力转向系统进行受力分析,搭建了数学和Simulink仿真模型。电动系统助力特性曲线设计中应用了模糊控制,并结合PID对助力电机进行控制。仿真表明:基于模糊控制设计助力特性曲线在速度较低时提供较大助力,随着汽车速度的增加,电动机提供助力越来越减小,提高了汽车转向系统轻便性和增强转向路感。当驾驶员施加在方向盘阶跃扭矩和正弦扭矩时,系统具有良好的跟随性,表明模糊和PID联合控制达到了良好的控制效果。
[1] 施国标,申荣卫,林逸.电动助力转向系统的建模与仿真技术[J].吉林大学学报(工学版),2007,(01):31-36. [2017-08-22].
[2] 侯凯元.电动助力转向系统的关键技术研究[D].河北联合大学,2013.
[3] 申荣卫,林逸,台晓虹,施国标.电动助力转向系统建模与控制策略研究[J].公路交通科技,2006,(08):160-162+170. [2017-08-29].
