森林消防机器人执行机构的设计与仿真
2018-01-23徐振亚姜树海
徐振亚,姜树海
(1.南京林业大学 机械电子工程学院,南京 210037;2.南京林业大学 智能控制与机器人技术研究所,南京 210037)
0 引言
森林火灾是一种突发性强、破坏力大,对森林生态系统和人类都具有巨大破坏力的自然灾害。森林火灾发生突然,蔓延速度快,火灾的扑灭也显得格外困难[1]。即使在火灾扑灭之后,也必须进行余火清理工作,根据以往经验总结,及时发现和彻底清理隐燃的余火,特别是肉眼难以发现的无烟的隐燃火才能够更好地避免发生余火复燃。然而,长期以来,人工进行森林余火探测与清理的效率低下并且危险系数很高[2],为提高探测余火的效率和避免不必要的损失,需要一种有效的、快速的余火探测及清理装备,研制能够在森林地形条件下进行火灾探测和清理等消防作业的移动消防机器人非常重要[3,4]。从目前来看,消防机器人的研究主要在地表相对规律的高层建筑,地铁隧道及地下建筑等场合中,从机动形式来看,一般履带式、轮式较多,且体型较大。在森林消防场合,由于森林的地形复杂多变,地面不同于城市结构的平坦地势,灌木丛、沟壑、斜坡等地形环境会严重影响消防机器人的前进效率,因此,研制能够在森林地形环境下有效地完成消防作业的机器人具有重要的实际意义[5-8]。
笔者所在的课题组开展了仿生甲虫机器人相应的研究工作,六足仿生机器人具有更好地适应森林的地面环境的能力[9]。机器人移动平台采用六足仿生结构,机器人在行进路程中不可避免地会遇到障碍物,这时执行机构可以对障碍物进行清理工作,提升机器人的移动速度,扩大其移动空间范围,保证机器人在发现余火迹象时能及时地赶往复燃点,将燃烧物熄灭或将难以熄灭的物体移至火线外安全范围进行灭火处理,实现森林余火的彻底清除[10,11]。本文将主要进行林火探测清理机器人执行机构的设计,通过运动学分析验证结构设计参数的合理性与正确性,并用ADAMS软件进行仿真验证。
1 机器人机械结构设计
森林消防机器人执行机构搭载在六足移动平台上,在机器人行走时对路障进行探测清理工作[12],根据机器人移动平台所允许的操作空间进行执行机构的设计。
要确定一个障碍物在空间的具体位置需要知道它沿三个直角坐标轴的移动自由度和绕这三个坐标轴的转动自由度,因此将执行机构确定为六自由度。执行机器人最大伸展长度(末端执行器中点与底座中点的水平距离)为1900mm,高度为460mm,总体结构如图1所示。总体结构根据实际需求进行了系统设计,由底座将执行机构与移动平台相连,末端执行器装有锯片,通过切割作业进行除障清理。执行结构可以简化成为串联末端无约束的开放式连杆结构,六自由度串联结构运动学方程更加简单可靠[13]。机械机构装配时需要较高的装配及加工精度以保证机器人的运动精度。
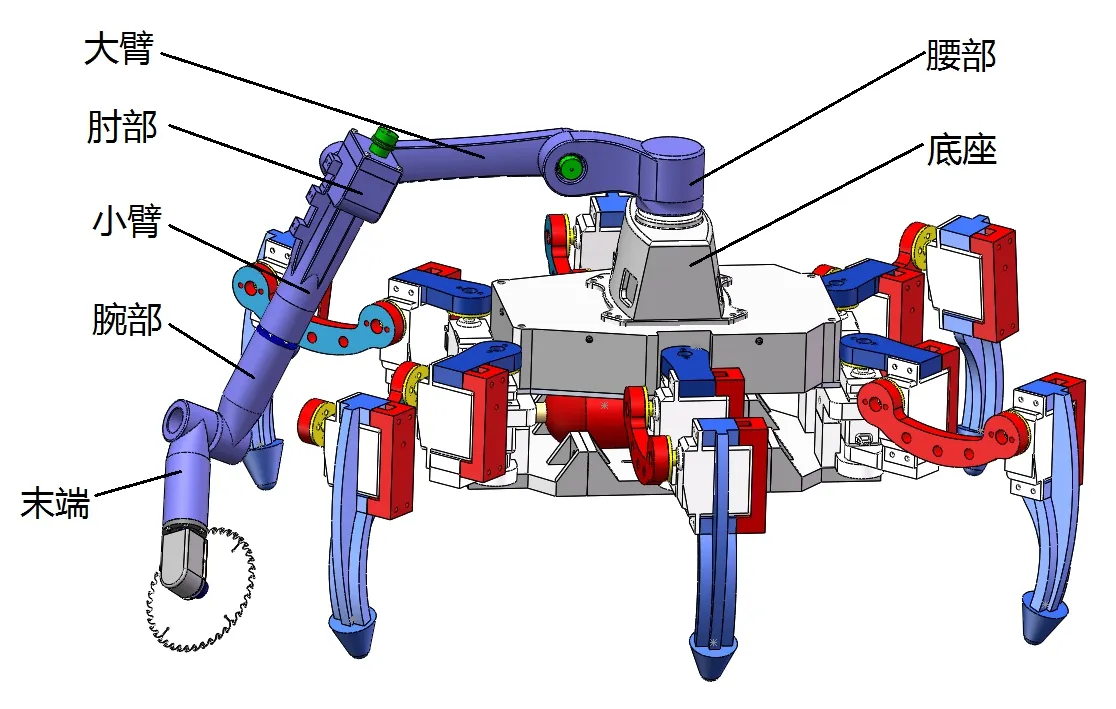
图1 总体结构
执行机构机器人结构主要由底座、腰部、大臂、小臂、手腕和末端执行器六部分组成,其结构如图2~图7所示。

图2 底座结构参数
图2所示为底座,长400mm,宽400mm,由八根螺栓固定在六足移动平台中心。作为执行机构的承载机构,底座具有很高的刚度及稳定性。底座中心装有电机,作为腰部回转机构的动力。

图3 腰部结构参数
图3腰部为执行机构的回转部件,可绕底座进行360°旋转,腰部的回转运动与手臂的平面运动使机构进行空间操作。腰部由六颗螺栓安装在底座电机减速器输出法兰上,腰部的制造精度及平稳性对机器人的定位精度有着决定性影响。
图4大臂连接腰部与小臂,俩端轴心距离为600mm,大臂是执行机构俯仰运动的关键关节,结构简单可靠,安装在腰部电机减速器法兰上。
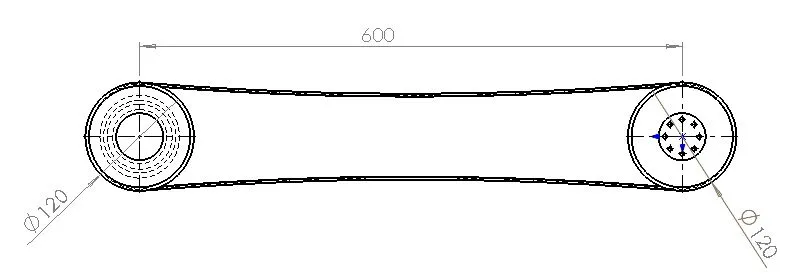
图4 大臂结构参数
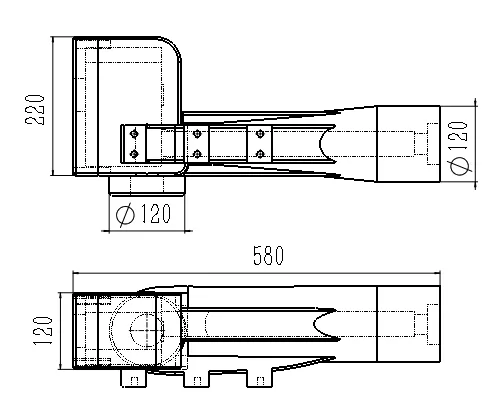
图5 小臂结构参数
图5小臂为执行机构传递轴向力的关键关节。小臂后端装有电机,通过小臂内部齿轮传动驱动手腕进行转动,电机布置于小臂后方方便安装,且加强小臂结构的刚度,为探测装置提供布线空间及稳固平台。

图6 手腕结构参数
图6手腕与末端执行器相连,可以绕小臂轴心转动,从而带动末端执行机构达到预定姿态,顶部装有电机,驱动末端执行器。

图7 末端执行器参数
图7末端执行器由两关节组成,其中一关节与手腕相连进行回转运动,另一关节末端装有锯片,以进行除障清理工作。
2 运动学分析
为对执行机构进行运动学分析,首先将机器人结构转换为物理模型。这里选用经典的D-H矩阵法则[14],建立执行机构的D-H坐标系,如图8所示。

图8 机器人D-H矩阵坐标系
定义连杆机构的参数描述如下:ai表示相邻关节沿xi轴方向Zi-1轴与Zi轴的长度,αi表示相邻关节Zi-1轴到Zi轴绕Xi-1的转角,di表示xi-1轴到xi沿Zi-1的距离,θi表示xi-1轴到xi轴绕Zi-1的转角,其具体参数如表1所示。

表1 各杆件D-H参数
2.1 运动学正解
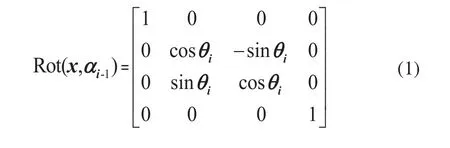
运动学正解就是在已知θ的情况下求解末端执行机构相对于参考坐标系的位姿,以齐次变换矩阵表示相邻连杆i-1与i的变换关系,四次变换的齐次矩阵分别是:
1)绕xi-1轴旋转
2)沿xi-1轴平移

3)绕zi轴旋转θi:
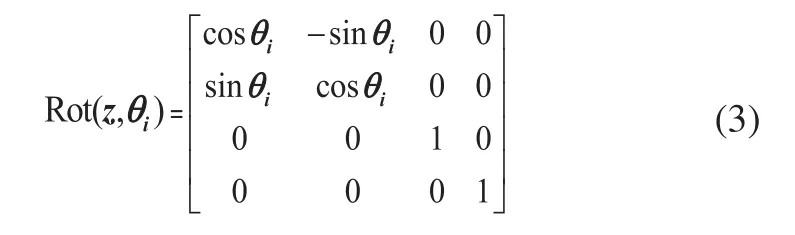
4)沿zi轴平移di:

由式(1)~式(4)D-H齐次变换矩阵为:

将表1中的数据代入D-H齐次变换矩阵,将单次变换定义为An则机械臂相对于参考坐标系的总变换为:

式中:

若机器人处于图8所示的状态,将d、θ代入得到执行机构末端的坐标为(0,a2,d1+d3+d4),结果与图示情况吻合,验证了齐次方程的正确性。
2.2 运动学反解
运动学反解就是在已知末端执行机构所要达到的位置的基础上求解各关节的θ值,在机器人运动方程式(6)两边同乘以A1-1得:

展开得:
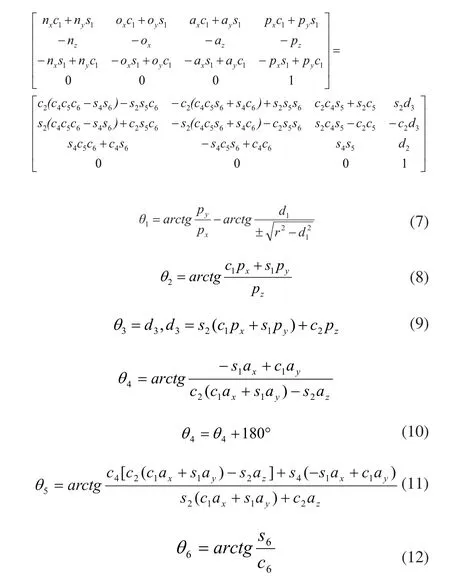
通过以上求解,执行机构要达预定位置会有多组解,需要根据实际操作状态进行数据筛选,机器人根据给出的θ值调整各关节旋转角度以达到指定位置。
3 机器人运动仿真
3.1 运动仿真
在SolidWorks中完成模型和的建立,并将模型转换为parasolid格式导入ADAMS软件中[15],设置仿真时间为8S,步数为500,模拟模型在高点低点的作业动作。驱动函数在ADAMS后处理模块中将末端点的位移,速度,加速度等信息如图9~图12所示。

图9 末端点位移曲线

图10 末端点速度曲线
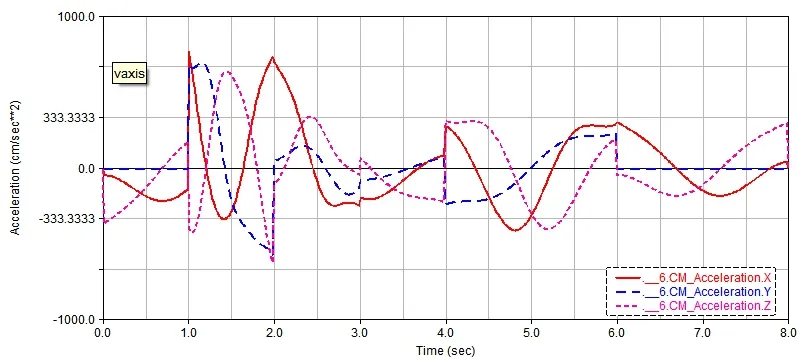
图11 末端点加速度曲线
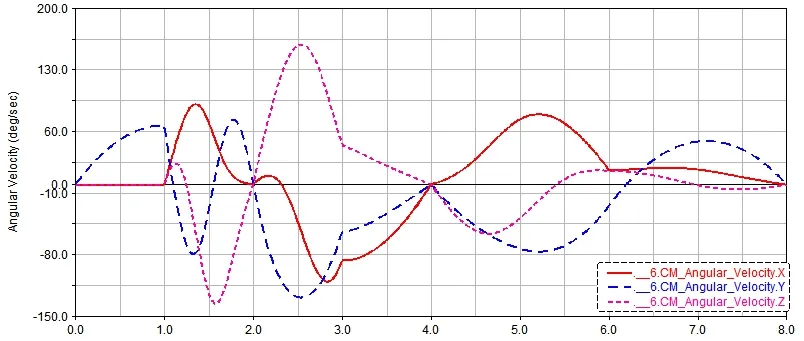
图12 末端点角加速度曲线
3.2 仿真分析
根据各关节所加载的驱动函数,函数驱动模型从初始位置到最高作业位置到最低作业位置再返回原位,各关节具体运动如下,0~2s第1关节在转动90°;2~4s逆时针转动-90°,第2关节在2~4s转动70°,第3,4,5,6关节转动90°;4~6s第1,2,5关节转动-90°,第3,4,6关节转动90°;6~8s第1,2,5关节转动90°,
【】【】第3,4,6关节转动-90°。从图9~图12可以看出,x轴方向的位移变化主要发生在第2~4s,y轴方向的位移变化主要在4~6s,z轴方向的位移变化主要发生在第2~6s,这表明大臂小臂主要起到调节高度的作用,第3,4关节在第6~8s内主要是起到辅助调整姿态的作用。曲线10显示末端点在第2.5s时达到最大速度,实际操作过程中可以优化各关节协调的角度以减小末端执行机构的角加速度。由曲线图可知,机器人手臂在整个轨迹运动过程中,速度变化都比较平稳,无剧烈振动现象,符合设计要求。
4 结论
通过对消防机器人在森林环境中的行走的除障清理需求分析,提出了一种森林消防机器人执行机构的解决方案。完成了消防机器人执行机构的结构设计并且利用SolidWorks构造了单臂三维模型,给出了各关节的关键结构图。建立了D-H坐标系,对机器人进行了运动学分析。最后基于ADAMS对机械结构进行运动仿真,根据仿真结果表明机械结构满足作业需求。运动学分析及仿真验证了该方案的正确性和可行性,为后续机械臂的具体结构设计与优化提供了理论依据。未来将在提高结构刚度,简化模型结构等方面进行进一步研究。
[1]赵璠,舒立福,周汝良,赵凤君,王明玉.林火行为蔓延模型研究进展[J].世界林业研究,2017,30(2):46-50.
[2]杨东升,章泽新,杨桦闻,武建良.森林火灾余火复燃条件研究[J].林业机械与木工设备,2016,44(2):21-25.
[3]Aric P. Shafran.Risk externalities and the problem of wildfire risk[J].Journal of Urban Economics,2008,64(2):488-495.
[4]Shah S S, Shah V K, Mamtora P, et al. Fire fighting robot[J].Int. J.Emerg. Trends Technol.Comp. Appl, 2013,2(4):232-234.
[5]张楠,姜树海.消防机器人研究进展及其在森林消防中应用前景[J].世界林业研究,2015,28(2):42-47.
[6]高仲亮,王秋华,舒立福,张明远.森林火灾扑救消防车装备的种类及使用技术[J].林业机械与木工设备,2014,42(8):10-14.
[7]Nagatani K,Okada Y,Tokunaga N,et al. Multi robot exploration for search and rescue missions: a report on map building in robot cuprescue 2009[J].Journal of Field Robotics,2011,28(3):373-387.
[8]Su K L. Automatic fire detection system using adaptive fusion algorithm for fire fighting robot[A].Systems, Man and Cybernetics, 2006. SMC’06. IEEE International Conference on.IEEE[C].2006,2: 966-971.
[9]姜树海,孙培,唐晶晶,陈波.仿生甲虫六足机器人结构设计与步态分析[J].南京林业大学学报(自然科学版),2012,36(6):115-120.
[10]肖刚. 国内外森林防火技术现状及趋势探讨[D].天津大学,2006.
[11]Amano H. Present status and problems of fire fighting robots[A].SICE 2002.Proceedings of the 41st SICE Annual Conference[C].IEEE,2002,2:880-885.
[12]姜树海,张楠.六足仿生森林消防机器人机构设计与分析[J].机械设计与制造,2015,(12):208-212.
[13]Husty M L, Pfurner M, Schröcker H P. A new and efficient algorithm for the inverse kinematics of a general serial 6 R,manipulator[J].Mechanism & Machine Theory,2005,42(1):66-81.
[14]Hartenberg R S, Denavit J.A kinematic notation for lower pair mechanisms based on matrices[J].Journal of applied mechanics,1955,77(2):215-221.
[15]王宏,张东来,李兵.基于MRDS的工业机器人仿真研究[J].机械设计与制造,2010,(8):152-154.
