基于事件触发的NCS鲁棒H∞保性能控制*
2018-01-19胡潇达刘延泉
胡潇达,刘延泉,张 华
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引 言
随着现代工业和计算机网络技术的发展,网络控制系统(NCS)已逐渐成为自动控制领域的热点课题之一。将通讯网络引入控制系统,可以使控制系统具有许多传统控制系统不具有的优点,如易于维护﹑结构和布线简单等。但是,将通信网络引入控制系统,也必然会将原本只存在于网络的问题引入控制系统,如存在网络诱导延时﹑数据包丢失﹑乱序和媒介访问受限等问题。这些问题特别是网络诱导时延的存在会导致网络控制系统性能下降甚至破坏系统原有的稳定性。因此,如何有效减小此类网络问题带给控制系统的影响,是现阶段网络控制系统分析与综合所面临的主要困难和挑战[1]。在NCSs中,各个节点共享的通信网络带宽是有限的。传统控制系统的控制任务是通过恒定的采样周期进行周期性执行。系统周期性执行有利于系统的性能分析,控制器设计也相对简单。但是,基于这种采样周期触发机制的控制策略使用了比保证系统所需性能更多的信息,浪费了大量带宽资源。目前,对网络控制系统的研究需要从减少对有限网络带宽资源的使用和如何降低通信网络负载的角度出发。为了解决这个问题,近年来的许多研究致力于改善网络控制系统的触发机制,一些学者提出了事件触发控制的思想[2]。近年来,基于事件触发控制机制的研究取得了许多成果,已被证明相对传统周期采样方法可以减轻网络带宽占有率的负担,能显著减少网络中的传输数据。
1 问题描述
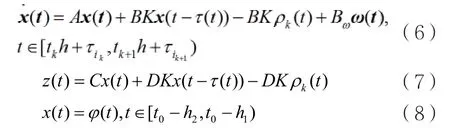
针对具有区间时变时滞的网络控制系统的控制问题,考虑如下被控对象:

给定对称正定矩阵Q和R,定义性能函数:

定义1 对于式(1)和式(2)描述的系统,若存在状态反馈控制律u(t)=kx(t),其中k是待求的控制器增益。标量γ>0﹑J*>0,使得形成的闭环满足如下指标:
(1)当ω(t)≡0时,要求系统渐近稳定;
(3)在零初始条件下,要求系统的干扰输入量ω(t)和控制输出量z( t)满足特定H∞扰动抑制水
则称u(t)为系统的H∞保性能状态反馈控制律。通过该控制律设计的控制器,可满足系统性能要求。
采用的离散事件触发机制可以描述为:

本文采用的离散事件触发机制以参数σ﹑V和h为特征量,只有满足式(4)的采样信号数据,才从传感器端经过事件触发器传输到系统的控制器端,最后在执行器执行。式(4)可以判断采样器端得到的数据,如果采样数据满足触发公式,则数据通过控制器传递到执行器端。反之,采样数据不会传递,而是跳过该周期进行下一次采样。因此,利用这种事件触发机制的NCS能够有效降低通信信道中的负载量,减少网络传输数据量。如果取式(4)的一个特征值σ=0,则该不等式对NCS中传感器端所有的采样状态数据均成立。事件触发通信机制将退化为传统的时间触发机制,即时间/周期触发机制是事件触发机制的一种特殊形式。更进一步证明,与时间/周期的触发机制相比,基于事件触发机制设计的控制器可以在保证系统满足给定性能的要求下,有效降低网络控制系统传递的数据量。其中:

2 系统建模
为了简化和方便分析后面的理论,在建立被控对象的NCS数学模型时,本文做了如下常见假设:控制系统的通信网络存在于传感器﹑控制器以及执行器之间,其中传感器和采样器为时间驱动,执行器和控制器为通过零阶保持器(ZOH)的事件驱动;被控对象所有状态可测,数据采用单包传输且没有数据丢包;网络总的时变时滞有上界和下界。采用文献[3]中的建模方法,当考虑网络延时与丢包时,得到系统在控制器u(t)=kx(t)控制下的基于事件触发机制的NCSs的系统模型:
其中,h为采样周期,釆样状态释放时刻为τ1h﹑τ2h…τkh。τik为采样数据满足事件触发条件时,事件触发器释放采样信号的时刻ik到执行器把成功触发的采样信号传输到被控对象上的时刻之间的网络诱导时滞。考虑到系统网络信道中的时变时滞,释放的采样信号将分别在t0h+τ0﹑…﹑tkh+τik时刻达到控制器端,此时定义φ(t)为对x(t)的初始化函数。
3 主要结果
定理1 对于由式(6)﹑式(7)和式(8)描述的闭环系统,给定正定对称矩阵Q﹑R,标量τm﹑τM满足关系式0<τm<τM,如果存在正定且对适当维数矩阵G和Y,使得式(9)和式(10)的矩阵不等式同时成立,即:

其中:
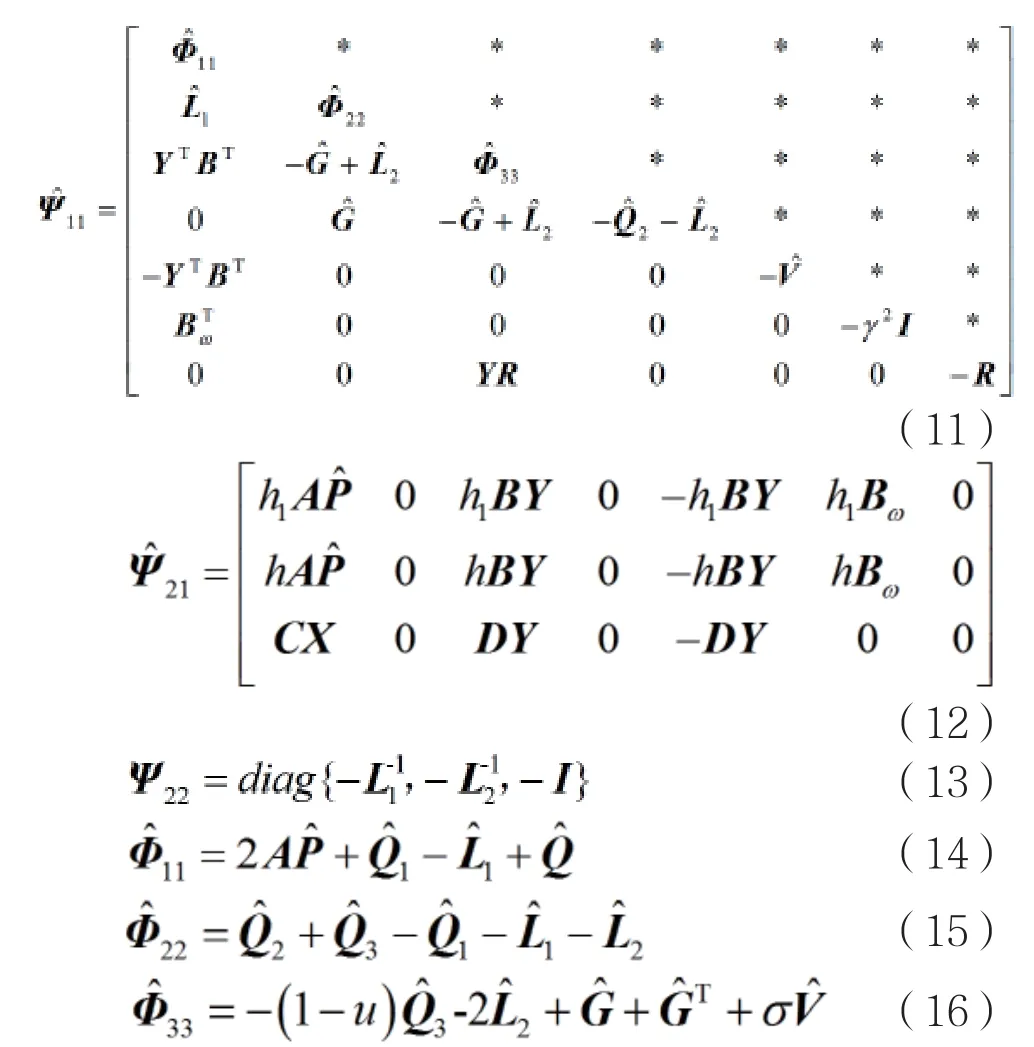
则系统是鲁棒渐近稳定的,且满足H∞扰动抑制衰减指标γ和保性能指标函数式(3),对应的控制器增益为K=YP^-1。
证明:构造Lyapunov-Krasovskii泛函:

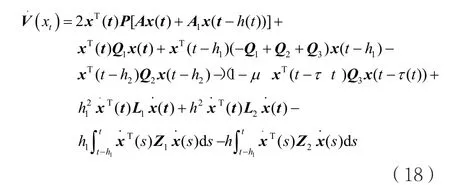
结合Jensen积分不等式和文献[4]中的互逆凸组合的数学方法,分别处理Lyapunov_Krasovskii泛函导数中出现的二次型积分项,结果如下:

其中:
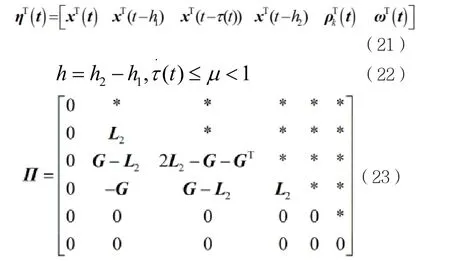
结合事件触发条件的关系式(5),将采样数据之间的误差向量引入泛函导数。
令:
当ω(t)=0时,V˙(t)<0。对式(33)两边从ikh+τik到ik+1h+τik+1积分,并注意到:

可得:

为了求解控制器增益K,需要进行合同转换,即对不等式(25)和不等式(26)两边分别左乘和右乘diag{P-1,P-1,P-1,P-1,P-1,I,I,I,I,I}﹑diag{P-1,P-1}及其转置,并定义P^=P-1,可得式(9)和式(10)成立。
定理得证。
注释 定理1首先对系统的稳定性进行了分析,得到了保守性较小的时滞依赖稳定性判据,进而在稳定性判据的基础上,通过合同变换的数学思想,得到了可以用于求解控制器增益的线性矩阵不等式,便于使用线性矩阵不等式的方法进行求解。
推导的矩阵不等式(9)中含有非线性项-L1-1﹑-L2-1,不是一般性的线性矩阵不等式。因此,不能直接用Matlab中的LMI工具箱对定理1得到的非线性不等式进行求解。为了进一步减小在求解运算过程中可能导致的保守性,可以使用文献[5]中的锥补线性化算法来求解式中的不等式。
在构造Lyapunov-Krasovskii式时,在含有二重积分项的泛函基础上,引入以区间时变传输时滞上界和下界信息作为积分区间的积分项,有利于降低结果的保守性。通过使用基于时变时滞的给定的条件,求得控制器的增益矩阵和事件触发器的参数,保证所得的控制器能够满足系统所需的性能。
4 仿真实例
选择文献[6]中的卫星网络控制系统作为仿真实例,对基于事件触发机制与时间/周期采样机制的系统性能进行分析和比较。
系统的状态方程如下:
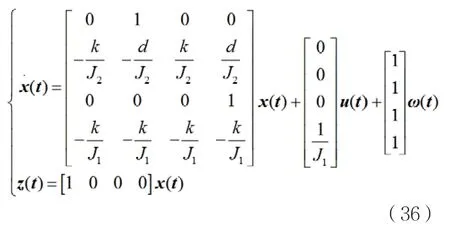
其中,J1=J2=1,k=0.09和d=0.021 9,性能指标参数R=0.1,时变时滞变化率μ=0.2,系数矩阵A的特征值为-0.021 9+0.423 7j﹑-0.021 9-0.423 7j﹑0和0,且系统是不稳定的。
其他参数设置为:h=10 ms,τm=2 ms,τM=4 ms,γ=40,σ=0.01。初始状态为x0=col{0.2 -0.3 0.3-0.2},仿真事件为60 s。
由定理1求得形如式(4)的事件触发器的参数和控制器增益:

基于事件触发控制下系统的状态响应如图1所示。可见,系统的状态向量均在有限时间内趋向于零,系统的状态响应满足渐近稳定的性能要求,因此由定理1设计的事件触发器和控制器能够镇定系统。

图1 事件触发控制下的系统状态响应
图2描述了不同通信机制控制下得到的系统状态向量范数随时间变化的曲线。显然,通过事件触发器传递的数据是周期采样数据的一部分,即通过事件触发器进行控制的状态向量包含于周期触发器的状态向量。结合图1可知,在不影响系统运行性能的情况下,事件触发控制与事件/周期采样控制对系统状态的控制效果几乎相同。

图2 事件触发控制和周期采样控制下的系统状态范数
图3描述了控制系统在事件触发机制作用下成功触发的采样时刻和最近两个成功触发时刻之间的间隔。可以认为,采样周期恒定为h的周期采样机制的触发间隔恒定为h。而由图3可以得到,事件触发机制作用下的触发间隔并不相等,且所有触发间隔均大于等于采样周期h。说明事件触发机制可以降低系统数据的传输频率,节省有限的资源。

图3 事件触发器的触发时刻及触发间隔
此外,由定理1得到的事件触发器的数据发送率为3.41%,比周期采样机制节约了96.59%的资源。
5 结 语
针对传感器端存在时变时滞时延的问题,结合事件触发器的网络控制系统,研究了基于离散事件触发机制的网络化系统鲁棒H∞保性能控制。为了节约有限的网络资源,不同于传统控制系统采用的时间/周期采样触发机制,本文采用离散事件触发机制,可以使传感器端的采样数据只在触发条件成立时才被发送到控制器端,有效降低了采样数据的发送,且易于软件实现。此外,在合理假设下建立了基于事件触发机制的时变时滞NCS系统数学模型,结合Lyapunov稳定性理论﹑线性矩阵不等式(LMI)技术和互逆凸组合的处理方法,构造了包含更多时滞上下界信息的Lyapunov-Krasovskii泛函,得到了一种保守性更低且满足系统要求性能的渐近稳定性判据。在该判据基础上,结合锥补线性化算法对事件触发器和状态反馈控制器进行联合设计,得到了事件触发器的特征参数和控制器增益。最后,通过编程和仿真典型实例,验证了本文方法的可行性和有效性。
[1] 邱占芝,张庆灵,杨春雨.网络控制系统分析与控制[M].北京:科学出版社,2009.
QIU Zhan-zhi,ZHANG Qing-ling,YANG Chun-yu.Analysis and Control on Networked Control Systems[M].Beijing:Science Press,2009.
[2] Arzen K E.A Simple Event-based PID Controller[C].Proceedings of the 14th IFAC World Congress,1999(18):423-428.
[3] Yan s,Yan H,Shi H,et aL.H ɕ Controller Design of Event-triggered Networked Control Systems[C].International Conference on Mechatronics &Control,2014:1972-1976.
[4] Park P,Ko J W,Jeong C.Reciprocally Convex Approach to Stability of Systems with Time-varying Delays[J].Automatica,2011,47(01):235-238.
[5] 刘于之,李木国,杜海.网络化控制系统鲁棒保性能控制研究[J].大连理工大学学报,2014,54(01):131-138.
LIU Yu-zhi,LI Mu-guo,DU Hai.Research on Robust Guaranteed Cost Control for Networked Control Systems[J].Journal of Dalian University of Technology,2014,54(01):131-138.
[6] Zhang X,Han Q L.Event-triggered Dynamic Output Feedback Control for Networked Control Systems[J].IET Control Theory and Applications,2014,8(04):226-234.
