移相全桥DC/DC变换器分数阶PIλDµ控制的研究
2018-01-18任旭亮易灵芝李青平朱和潇
任旭亮,易灵芝,2,陈 宇,李青平,朱和潇
(1.湘潭大学 信息工程学院,湘潭 411105;2.湖南省“风电装备与电能变换”2011协同创新中心,湘潭 411101)
0 引言
近年来,移相全桥DC-DC变换器损耗小,效率高且可以实现软开关,在中大功率场合应用广泛。由于存在非线性特征,传统整数阶PID控制方式在快速性、稳定性和抗干扰性均难以达到某些场合的特殊要求。相对于传统整数阶PID,智能控制虽然性能较好,但在实际应用中难以实现。分数阶理论的发展,为解决这种问题提供了可行性,可用来提高变换器控制效果[1,2]。
基于传统PID控制器,I.Podlubny教授提出分数阶PID控制[3]。分数阶PID控制是对传统整数阶的概括和补充,相比传统PID多了两个可调参数积分阶次λ和微分阶次µ,PIλDµ控制器的参数整定范围变大,其控制更加灵活,使系统具有更好的鲁棒性和控制效果[4]。本文以移相全桥DC-DC变换器为对象设计其分数阶控制器与整数阶比较,提高稳定性和抗干扰能力。
1 移相全桥变换器建模
移相全桥变换器拓扑如图1所示,开关管Q1和Q3组成超前桥臂,Q2和Q4组成滞后桥臂。通过调节前后桥臂导通角之间的相位差(即移相角),来调节输出电压的大小。文献[5]以Buck变换器作为移相全桥变换器为基础,考虑两者之间明显区别,即移相全桥变换器谐振电感Lr与开关管并联电容产生谐振,使开关管工作于软开关状态时造成占空比丢失。在移相全桥变换器中,变压器副边有效占空比不仅与原边占空比d相关,还与输出电感电流IL,谐振电感Lr,输入电压Vin和开关频率fs有关。将以上影响加到图2所示的Buck电路小信号等效模型中。
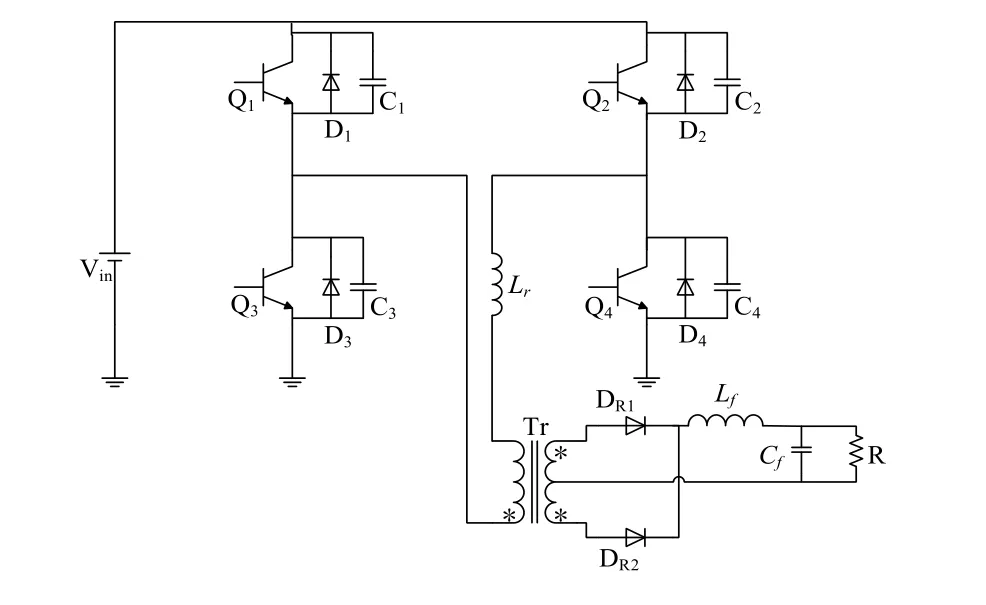
图1 移相全桥变换器电路拓扑
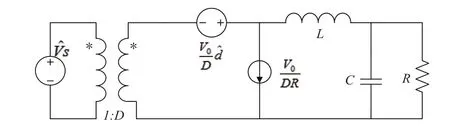
图2 Buck电路小信号等效模型
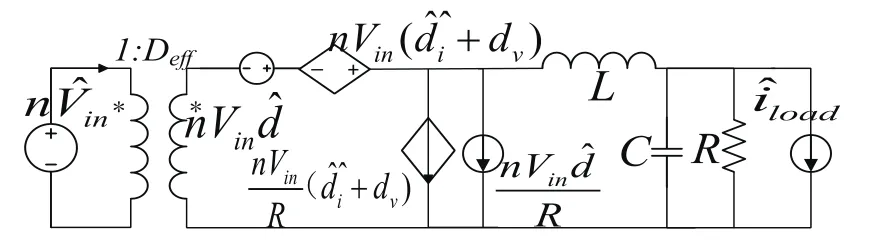
图3 移相全桥变换器小信号模型
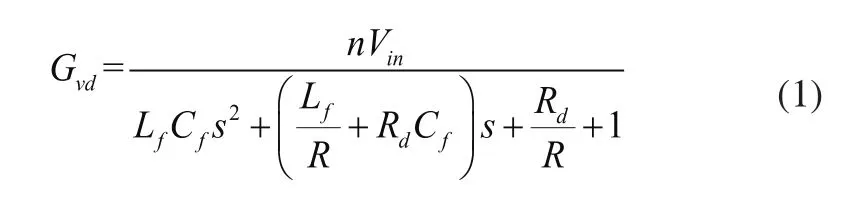
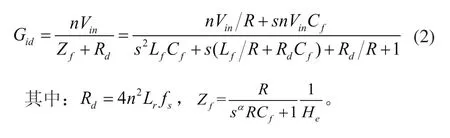
用Deff替换替换占空比扰动,且代替直流输入电压扰动得到图3所示的移相全桥变换器的小信号模型。由图3,得到移相全桥DC-DC变换器传递函数,即:
2 分数阶微积分控制器
2.1 分数阶微积分(FOPID)
在分数阶微积分的发展历程中,不同的领域,分数阶微积分的定义是不完全相同的。在控制领域,常用的定义有Grünwald-Letnikov(GL)、Riemann-Liouville(RL)和Caputo定义[6,7]。不同的定义应用范围、特点和优势均不同。Caputo定义的分数阶微分在其初始条件的导数为0,具有明确的物理意义,其Laplace变换在控制领域应用广泛[8]。
Caputo分数阶定义如式(3)所示:

式(3)中:Г为伽马函数,m-1<ɑ<m,m取整数。
对式(3)表示的Caputo分数阶微积分函数进行Laplace变换为:

其中:n−1≤α≤n,α∈N。
式(4)在零初始条件下,其求和项为零,因此得到分数阶PIλDµ控制器传递函数为:

其中,λ为积分阶数,μ为微分阶数。
2.2 分数阶PIλDµ控制器数字实现
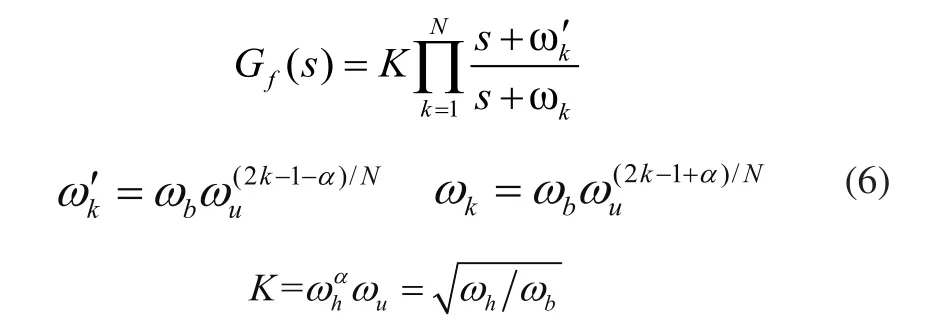
由于分数阶控制系统的传递函数是无限维的,实际中难以实现。因此需要对分数阶控制系统进行有理化的近似。分数阶PIλDµ控制器离散化方法主要有直接离散化方法和间接离散化方法。通过采用Oustaloup间接近似化方法[9],来近似实现分数阶PIλDµ控制器。假设给定频段建立连续的滤波器传递函数为:
2.3 分数阶PIλDµ控制器设计
分数阶PIλDµ控制器可以对KP,KI,KD,λ,μ这个5个参数调整,引入了积分阶次λ和微分阶次μ使得系统的鲁棒性,稳定性和整体的控制性能等方面提高,其控制结构框图如图4所示。由于分数阶PIλDµ控制器需要对5个参数调整,在参数优化上比传统PID困难。
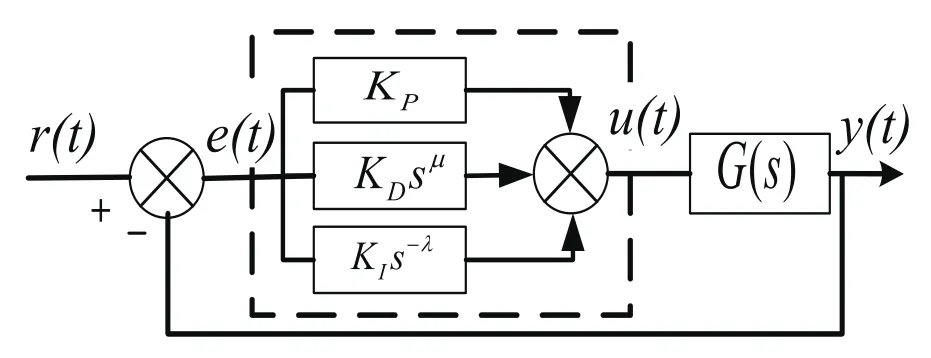
图4 分数阶PIλDµ控制框图
因此,本文采用粒子群优化算法(PSO),从而快速有效的调整分数阶PIλDµ控制器参数,为了满足系统动态特性,以ITAE作为性能指标,定义如下:

其中,t为时间,e(t)表示误差。
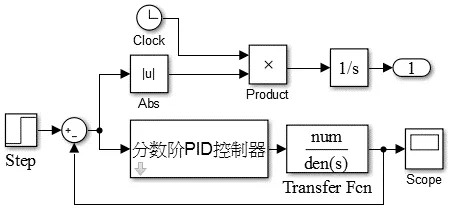
图5 以ITAE为指标的分数阶参数整定Simulink框图
如图5所示,根据Oustaloup滤波算法在Simulink中建立的分数阶微积分仿真模块,对式(1)移相全桥DC-DC变换器分数阶传递函数,基于PSO算法进行参数整定。经过参数寻优,得到相关的控制器参数KP,KI,KD,λ和μ。
3 实验验证
3.1 仿真实验
为了验证移相全桥变换器分数阶控制方法的控制效果,分别基于分数阶PIλDµ控制和传统整数阶PID控制方法下进行仿真实验。移相全桥DC-DC变换器主电路参数如表1所示。
基于图5所示的仿真模型,将表1参数代入式(1)的传递函数,基于粒子群算法以ITAE指标对其进行参数优化。设种群维数为50,最大迭代次数为50,惯性因子w为0.6,加速度常数c1=2,c2=2,粒子最小适应值为0.1。在λ=0.75,μ=0.5,分数阶PIλDµ参数优化曲线如图6所示。
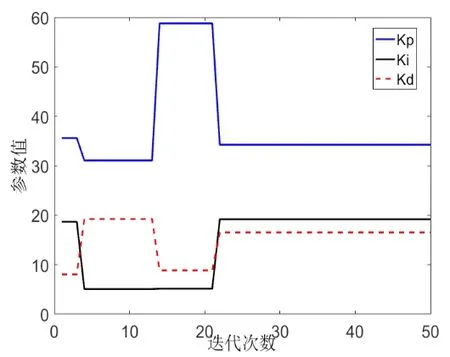
图6 分数阶PIλDµ参数优化曲线
由图6得到优化后的分数阶PIλDµ控制函数为:

在相同条件下,PSO算法优化后的整数阶PID优化曲线如图7所示。
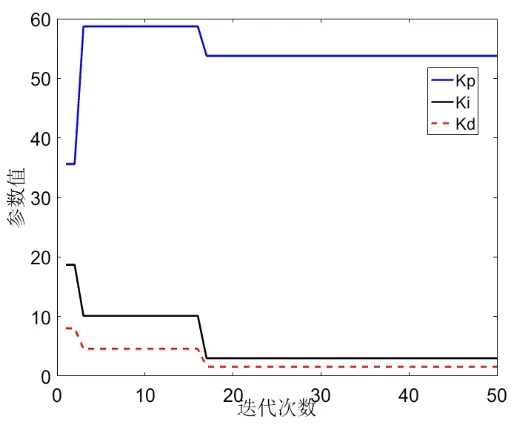
图7 整数阶PID参数优化曲线
由图7得到优化后的整数阶PID控制函数为:

优化后分数阶PIλDµ控制器和整数阶PID控制器的单位阶跃响应曲线,如图8所示。
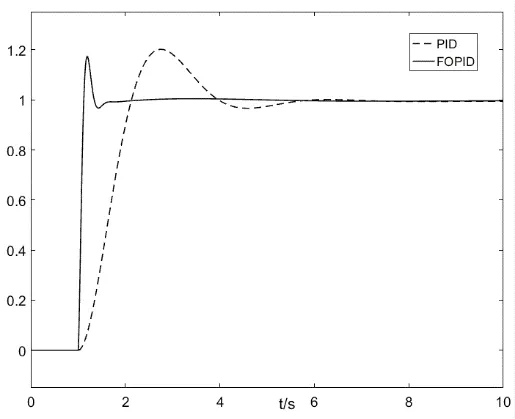
图8 FOPID与PID控制阶跃响应
由图8可以看出:相比传统整数阶PID控制器,移相全桥DC-DC变换器分数阶PIλDµ控制器快速性更优、调节时间更短、且能更快趋于稳态。
根据图1的移相全桥变换器电路拓扑和表1的仿真参数,基于Simulink平台搭建仿真模型。其他条件保持不变,分别以式(9)的传统PID函数与式(8)的分数阶PIλDµ函数进行闭环仿真实验。
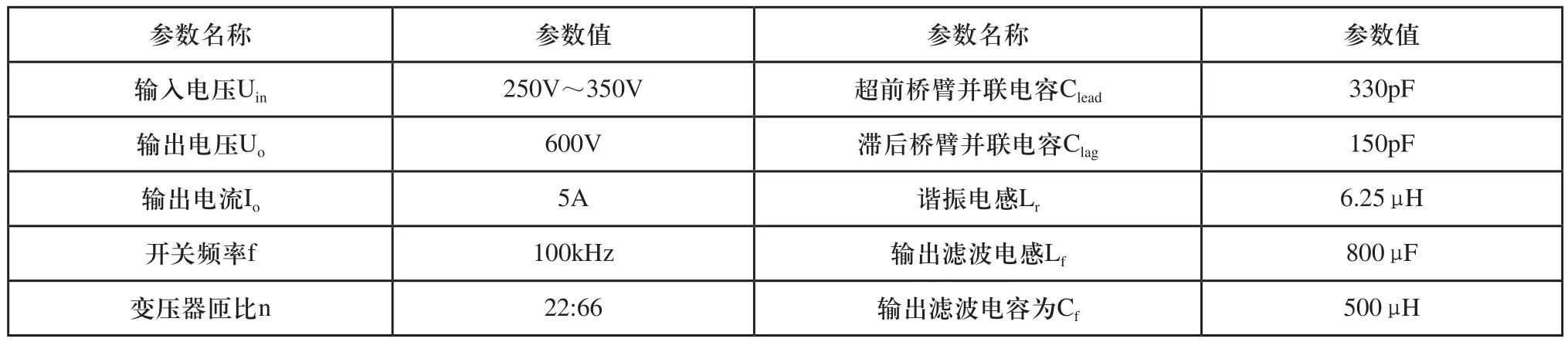
表1 移相全桥变换器主电路仿真参数
当负载由120Ω跳变为300Ω时,整数阶PID控制方式与分数阶PIλDµ控制方式下输出电压Uo和负载电流Io波形如图9与图10所示。
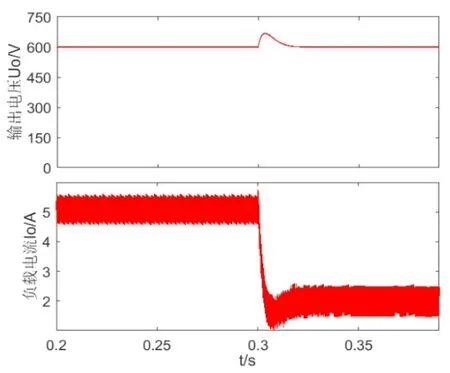
图9 整数阶PID负载变化瞬态响应
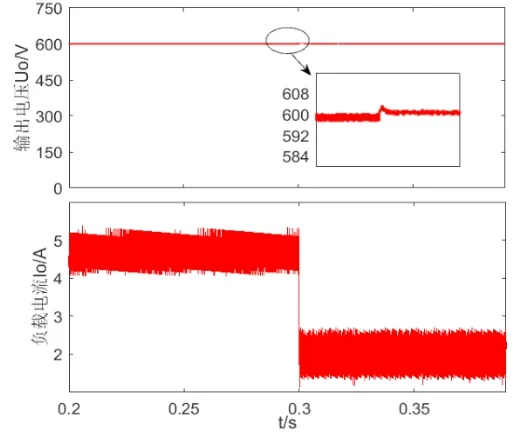
图10 分数阶PIλDµ负载变化瞬态响应
当负载在0.3s变化时,使用整数阶PID控制时,输出电压过冲约为70V,调节时间约25ms。分数阶PIλDµ控制方式下,输出电压过冲不到10V,调节时间约5ms。
因此对比可知,分数阶PIλDµ的控制器比整数阶PID电业恢复快,过冲小。
3.2 样机实验
本文采用TMS320F28335PTPQ作为主控制器在实验室搭建3kW的移相全桥DC-DC变换器实验样机。变压器原边主开关管MOSFET采用SPW47N60C3,副边整流二极管采用DESC30-12A。如图11所示。
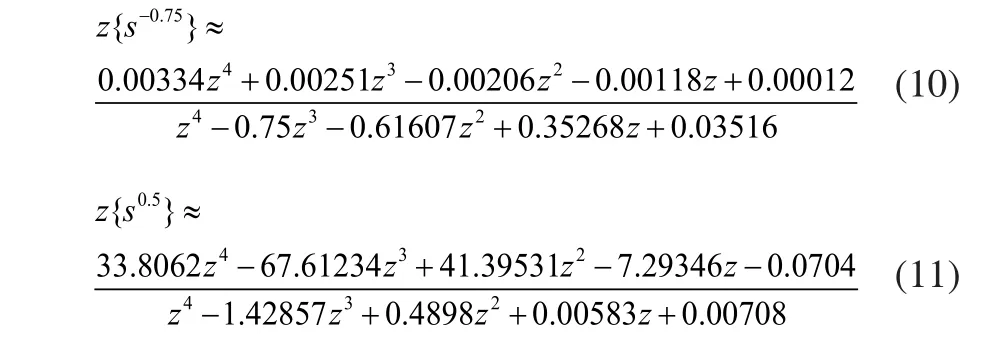
在实验中,分数阶PIλDµ控制器采用直接离散化方法Tustin+CFE的方法对分数阶微积分算子进行有理化[10]。对式(8)中微积分算子有理化,积分算子1/s0.75与微分算子s0.5的有理近似表达式:
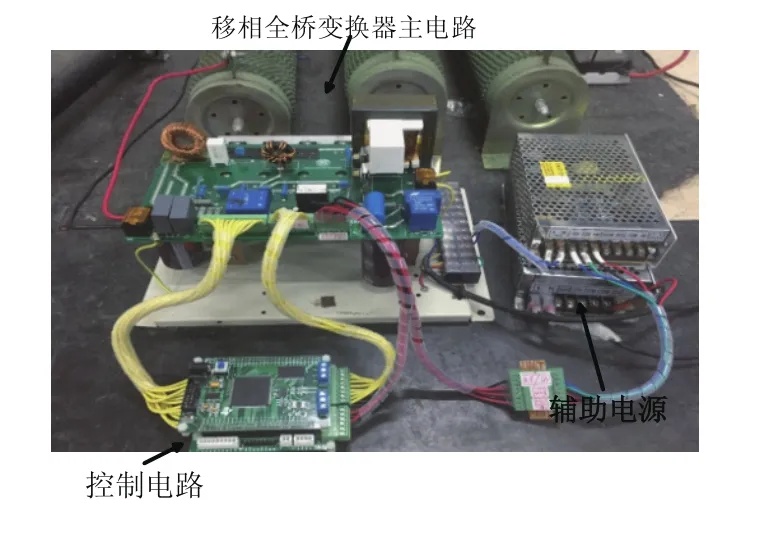
图11 3kW移相全桥DC-DC变换器样机
样机参数与表1一致,波形如图12与图13所示。
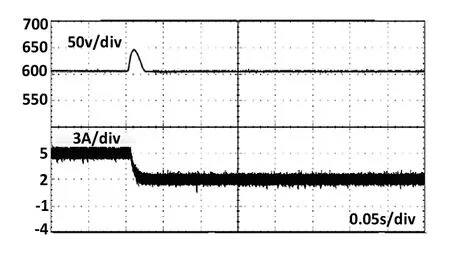
图12 整数阶PID控制下负载变化输出电压电流
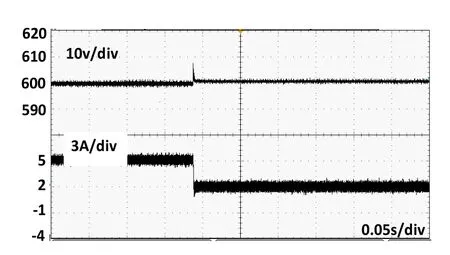
图13 分数阶PIλDµ控制下负载变化输出电压电
由图12与图13波形对比可知,样机实验结果与仿真波形基本保持一致。采用分数阶PIλDµ控制方式的移相全桥变换器,当负载发生变化时,副边输出直流电压上冲幅度小,动态调节时间短和更强的鲁棒性。硬件实验结果与仿真基本一致。
4 结论
将分数阶PIλDµ控制器应用在移相全桥变换器中代替传统的PID控制器,基于粒子群优化算法对分数阶PIλDµ和传统PID控制器进行参数整定。通过仿真和样机实验结果对比分析,表明了对于移相全桥DC-DC变换器,分数阶PIλDµ控制器优于传统PID控制器,提高系统的动态性能和使系统具有更强的稳定性。
[1]Rabia Nazir, Keliang Zhou, Neville Watson, Alan Wood.Analysis and synthesis of fractional order repetitive control for power converters[J].Electric Power Systems Research,2015,124(7):110-119.
[2]Swapnil Khubalkar, Amit Chopade,Anjali Junghare.Design and Realization of Stand-Alone Digital Fractional Order PID Controlle[J].Circuits Systems and Signal Process,2016,35(6):2189-2211.
[3]I.Podlubny. Fractional-order systems and PIλDµcontrollers[J].IEEE Transactions on Automatic Control,1999,44(1):208-214.
[4]D.Zhu, L. Liu and C. Liu.Optimal fractional-order PID control of chaos in the fractional-order BUCK converter[A].2014 9th IEEE Conference on Industrial Electronics and Applications,Hangzhou[C].2014:787-791.
[5]V. Vlatkovic, J. A.Sabate, R. B. Ridley, F. C. Lee and B. H. Cho.Small-signal analysis of the phase-shifted PWM converter[J].IEEE Transactions on Power Electronics,1992,7(1):128-135.
[6]赵春娜,李英顺,陆涛.分数阶系统分析与设计[M].北京:国防工业出版社,2011.
[7]OSHI S D, TALANGE D B. Integer& Fractional Order PID Controller for Fractional Order Subsystems of UAV[A].2013 IEEE Symposium on Industrial Electronics and Applications[C].2013:21-26.
[8]马霄.分数阶PID控制器数字实现及应用研究[D].河北大学,2014.
[9]OUSTALOUP A, LEVRON F, MATHIEU B, et al. Frequency band complex no integer differentiator. Characterization and synthesis[J].IEEE Transactions on Circuit and Systems-I:Fundamental Theory and Applications,2000,47(1):25-39.
[10]赵慧敏.分数阶控制器数字实现方法及其振动抑制性能研究[D].大连交通大学,2013:26-28.
