基于Hopfield神经网络的路径优化
2018-01-11欧阳玲
欧阳玲
(中原工学院, 郑州 450007)
某公司决定派遣调查员调查市场行情,现有N个城市,要求调查员调查每一个城市,并且不能重复,最后返回公司所在城市。如何安排调查顺序,使其路程最短呢? 这正是旅行商问题(Traveling Salesman Problem,TSP)[1]研究的范畴。由于路径数目会随着城市数目的增加呈指数增长,当N很大时,用常规方法在庞大的搜索空间寻找最优解变得非常困难。本文基于Hopfield神经网络对旅行商问题进行研究,建立能量函数,提出设计方法,给出路径优化的解决算法,并对城市数目N分别为8、20、40的旅行路径进行计算机MATLAB模拟仿真。
1 Hopfield神经网络模型能量函数
Hopfield神经网络模型由许多互联的神经元组成,如图1所示。
对于一个神经元i,ui为其状态输入;R与Ci分别为输入电阻和输入电容;Ii为输入电流;wij为j神经元和i神经元之间的连接权值;vi为神经元的输出,是神经元状态变量ui的非线性函数。
对于Hopfield神经网络的第i个神经元,可采用微分方程建立其输入、输出关系[2],即:
(1)


图1 Hopfield 人工神经网络模型
在状态空间中考虑Hopfield神经网络的动态特性,分别令U=(u1,u2,…,un)T为具有n个神经元的Hopfield神经网络的状态向量,V=(v1,v2,…,vn)T为输出向量,I=(I1,I2,…,In)T为网络的外加输入向量。为了描述Hopfield网络的动态稳定性,可定义标准能量函数为[2]:
(2)
针对旅行商问题,将式(2)转化,以便与神经网络对应。这里,采用N阶换位矩阵表示调查者访问N个城市[1]。例如,当城市数目N=4时,集合表示为{A,B,C,D},要求经过的路线是从城市D出发,中间依次经过城市C、B、A,最终返回城市D。若用矩阵来表示输出的有效解,“1”代表到达,“0”代表未到达,则有表1所示4个城市访问路线的二维矩阵。

表1 4个城市的访问路线
如果访问路线是一个有效的路径,矩阵中每一行每一列的元素是有规律的,即每行每列中“1”的个数为1,其余的都为0。如果不是这样的矩阵,则说明这个访问路线是无效的。对于一个神经元(x,i),用Vxi表示这个神经元的输出,Uxi表示相应的输入。如果在i位置到达城市x,则神经元的输出为1,否则为0。
Hopfield定义了针对TSP问题的能量函数[3]:
(3)
式中:A、B、C和D是权值;dxy是城市x与城市y之间的距离。
在该能量函数中,E的第一项是行能量函数,第二项是列能量函数,第三项是全局约束函数,这3项是约束项,最后一项是优化目标项。
(1)行能量函数:每行只有一个1,其余元素都是 0,假设第x行满足这个条件,那么第x行的所有元素两两相乘再求和,结果应该是0。根据这个约束,可构建出能量函数中的第一项:
(4)
式中:A>0,是常数;当矩阵每一行1的个数不大于1时,E1达到最小,即E1min=0。
(2)列能量函数:每列只有一个1,其余元素都是 0,假设第x列满足这个条件,那么第x列的所有元素两两相乘再求和,结果应该是0。根据这个约束,可构建出能量函数中的第二项:
(5)
式中:B>0,是常数;当矩阵每一列1的个数不大于1时,E2达到最小,即E2min=0。
(3)全局约束函数即能量函数的第三项:
(6)
式中:C>0,为常数。全局约束表示当矩阵中1的个数恰好为N时,E3min=0。
(4)考虑路径最短的优化目标,可以构建出能量函数的第四项:
(7)
式中:D>0,为常数;dxy表示城市x到城市y的距离。从式(7)可以看出:若城市x和城市y在路径中相邻的话,Vy,i+1和Vy,i-1必定有一项为0,一项为1;若城市x和城市y在路径中不相邻的话,Vy,i+1和Vy,i-1全为0。通过式(7)可以计算出路径的长度。
由式(4)-式(7)可以构成用Hopfield网络求解TSP问题的能量函数式(3)。
2 采用Hopfield网络求解TSP问题的算法


表2 城市数与路径数
当N比较大时,很难求取精确解。若直接采用能量函数式(3)进行求解,则可能存在局部极小值的问题。为此,可将式(3)优化为[4]:
(8)
由式(2)和式(8),分别对时间t微分,可得如下动态方程:
(9)
采用MATLAB进行计算机模拟,具体步骤如下:
(1)令网络的初始值t=0,设置相关参数A、D、μ的值;
(2)计算N个城市之间的距离dxy(x,y=1,2,…,N);
(3)设置神经网络输入Uxi(t)的初始值;
(5)根据一阶欧拉法,求解

(10)
(6)采用Sigmoid函数计算Vxi(t),满足上述行、列能量函数及全局约束最小的条件(即矩阵每一行只有一个1,每一列也只有一个1,其余都为0),即:
(11)
式中,μ>0,μ的大小决定了Sigmoid函数的形状;
(7)根据式(8)计算能量函数E;
(8)若路径合法或迭代结束,则终止仿真,否则返回步骤(4);
(9)输出原始路径及最终的优化路径,以及能量函数随迭代次数变化的曲线[5]。
3 仿真实例
首先需要设置实验中用到的网络参数,并令式(8)中A=1.5,B=1.5,D=1.0;取式(10)中ΔT=0.01,Uxi(t)初始值在±0.001之间;在式(11)中,只有取较大的μ值(μ=50),才能保证稳态时Vxi(t)趋向于1或者0。
路径矩阵中的元素是对应于实验结果的。在程序运行后,如果仿真成功,即寻优路径有效,矩阵中的每一行只有一个1,每一列也只有一个1,即代表每个城市只去一次;若寻优路径无效,则需要重新进行优化实验。
然后,在仿真中对N分别为8、20、40的旅行路径进行优化(见图2-图7,表3-表5)[6]。

注:(X,Y)为坐标。图2 初始路径及优化后的路径(N=8)
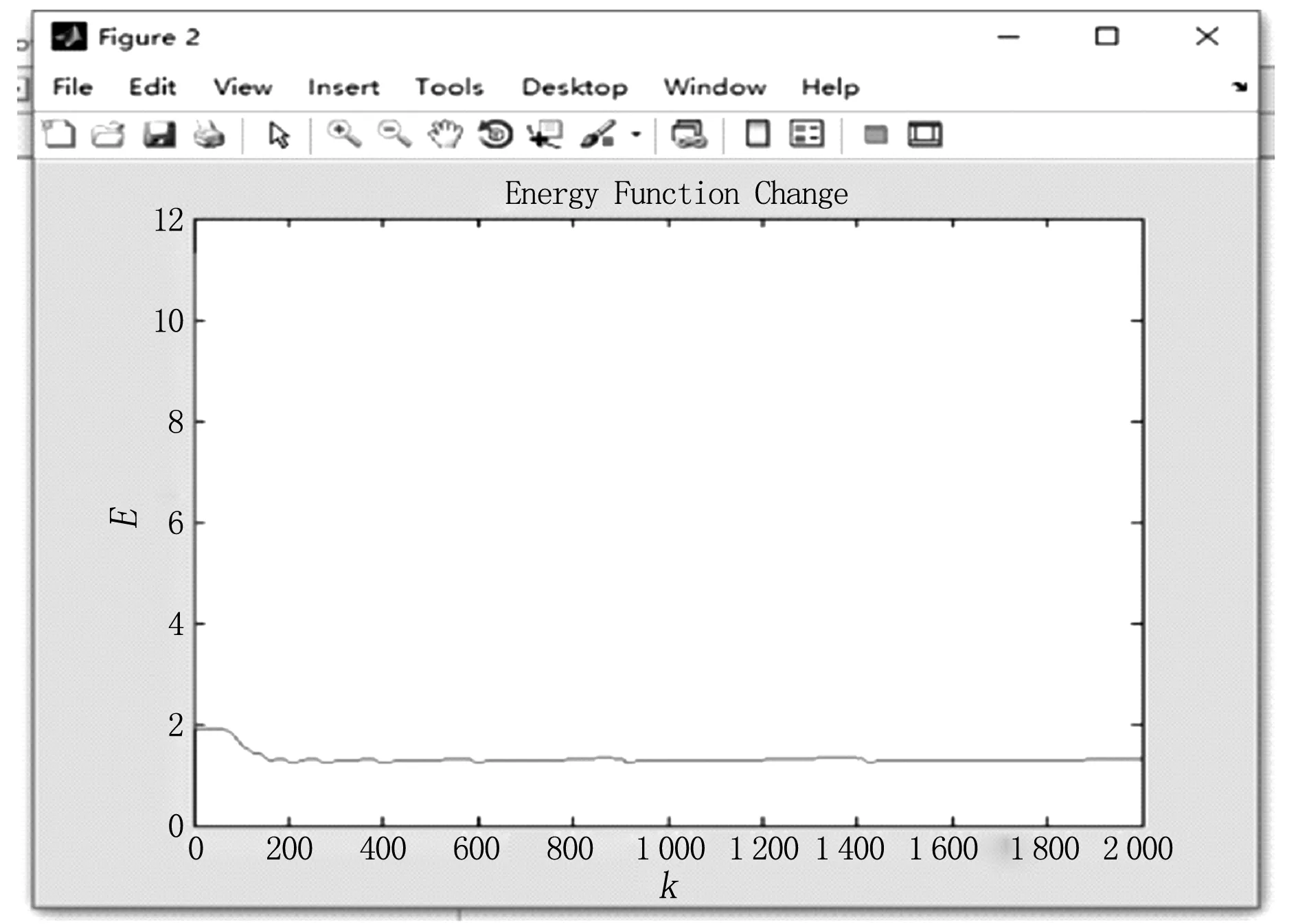
注:E为能量函数;k为迭代次数。图3 能量函数随迭代次数的变化(N=8)

注:(X,Y)为坐标。图4 初始路径及优化后的路径(N=20)

注:E为能量函数;k为迭代次数。图5 能量函数随迭代次数的变化(N=20)

注:(X,Y)为坐标。图6 初始路径及优化后的路径(N=40)

注:E为能量函数;k为迭代次数。图7 能量函数随迭代次数的变化(N=40)

表3 各城市坐标(N=8)
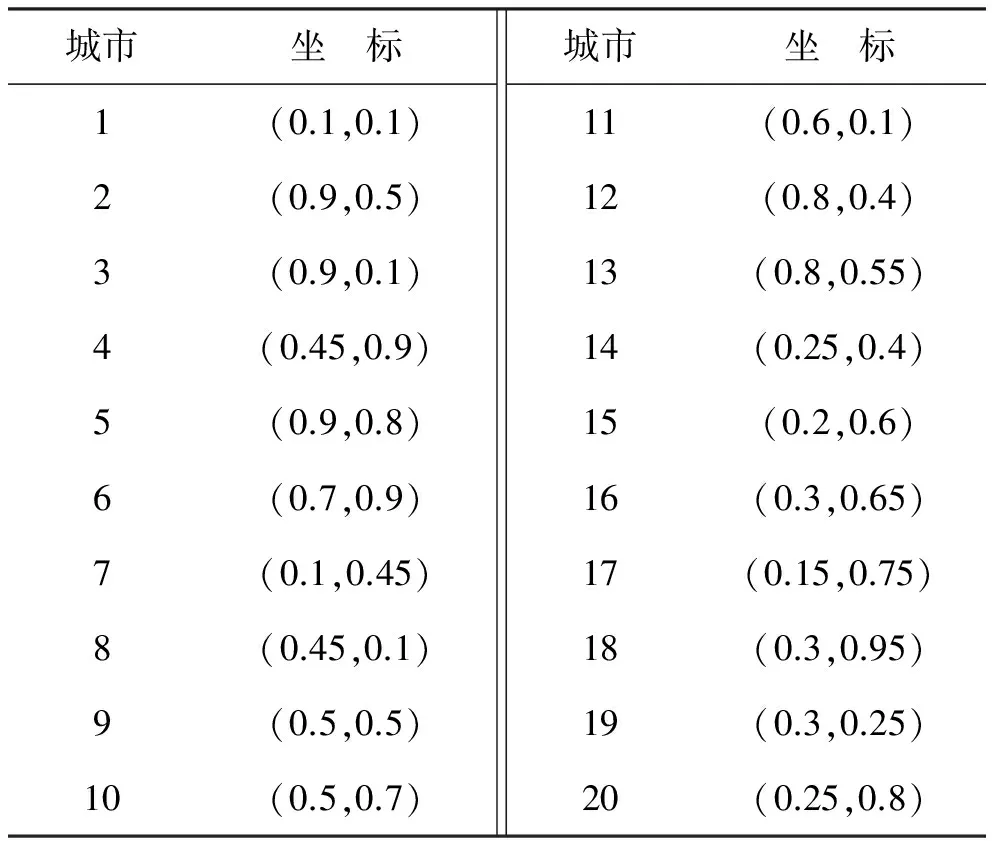
表4 各城市坐标(N=20)
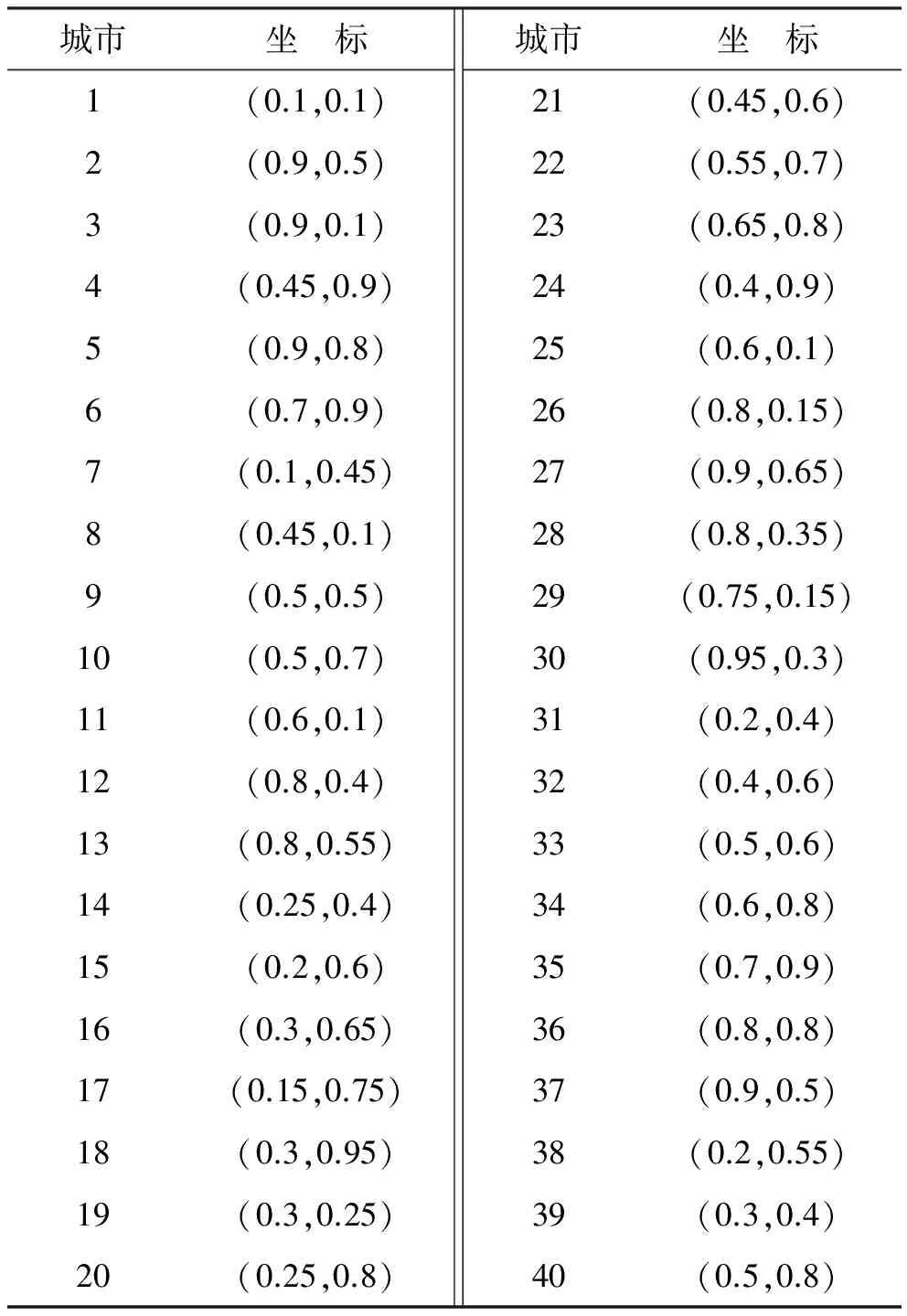
表5 各城市坐标(N=40)
上述仿真实验,在100次中,基本上有90次以上可收敛到最优解,表明算法有稳定性。以N=8为例,最后的仿真结果如图2和图3所示。在图2中,左边为初始路径(Original Route),右边为优化后路径(New Route)。可明显看出,优化后相互交叉的路径大大减少,路径规划更为合理。图3显示的是能量函数随迭代次数的变化情况。可以看出,E的值随着迭代次数的增大而减小。N=20及N=40时,结论相似。
对N=8、20、40时进行的计算机MATLAB仿真表明,最终能量函数都是最小的,即收敛到了极小点。这与仿真之前的原理分析是一致的,路径优化的原理与研究方法是正确的。实验证明,无论是Hopfield网络的设计还是算法都是有效的,而且实用价值很高。
4 结 语
本文在分析Hopfield神经网络和TSP算法的基础上,进行了求解TSP问题的Hopfield网络设计,并采用MATLAB针对不同城市数N的路径优化问题进行了仿真,获得了经典组合优化问题的最优解,验证了算法的有效性。针对标准TSP能量函数易引入局部极小值的问题,后续将展开深入研究,进一步优化能量函数,以提高在N值更大时TSP最优解收敛的成功率。
[1] 吴高航.Hopfield神经网络解TSP问题及能量函数参数分析[J].现代计算机,2016(9):90-92.
[2] 刘金琨.智能控制(第三版)[M].北京:电子工业出版社,2014:167-172.
[3] Hopfield J,Tank D W. Neural Computation of Decision in Decision in Optimization Problems[J]. Biological Cybernetics,1985,52:141-152.
[4] 孙守宇,郑君里.Hopfield网络求解TSP的一种改进算法和理论证明[J].电子学报,1995,23(1):73-78.
[5] 张丽霞,赵又群,潘福全. Hopfield神经网络算法求解路网最优路径[J].哈尔滨工业大学学报,2009,41(9):222-224.
[6] 闻新,李新,张兴旺,等.应用MATLAB实现神经网络[M].北京:国防工业出版社,2015:202-247.
